卫星导航数据的有效性判断方法及装置、电子设备与流程
本公开实施例涉及卫星导航,特别涉及卫星导航数据的有效性的判断方法及装置、电子设备。
背景技术:
1、惯性导航是利用安装在移动载体上的惯性测量元件测量移动载体的角速度和加速度信息,并通过积分运算得到移动载体的位置、速度等导航参数。
2、在实际应用中,惯性导航系统因需要通过积分产生导航数据,使得惯性导航的累计误差越来越大,常影响惯性导航的精度。为提高惯性导航的精度,将惯性导航和全球定位系统(global positioning system,gps)的定位数据结合是比较有效的手段。然而,在许多场景(如隧道口、停车场、镜像、封闭道路)中存在静电反射,经常出现信噪比低、星数较多,但gps数据无效的情况。因此,基于星数无法判断gps数据的有效性,从而影响导航的准确性。
3、公开内容
4、本公开实施例提供一种卫星导航数据的有效性的判断方法及装置、电子设备。
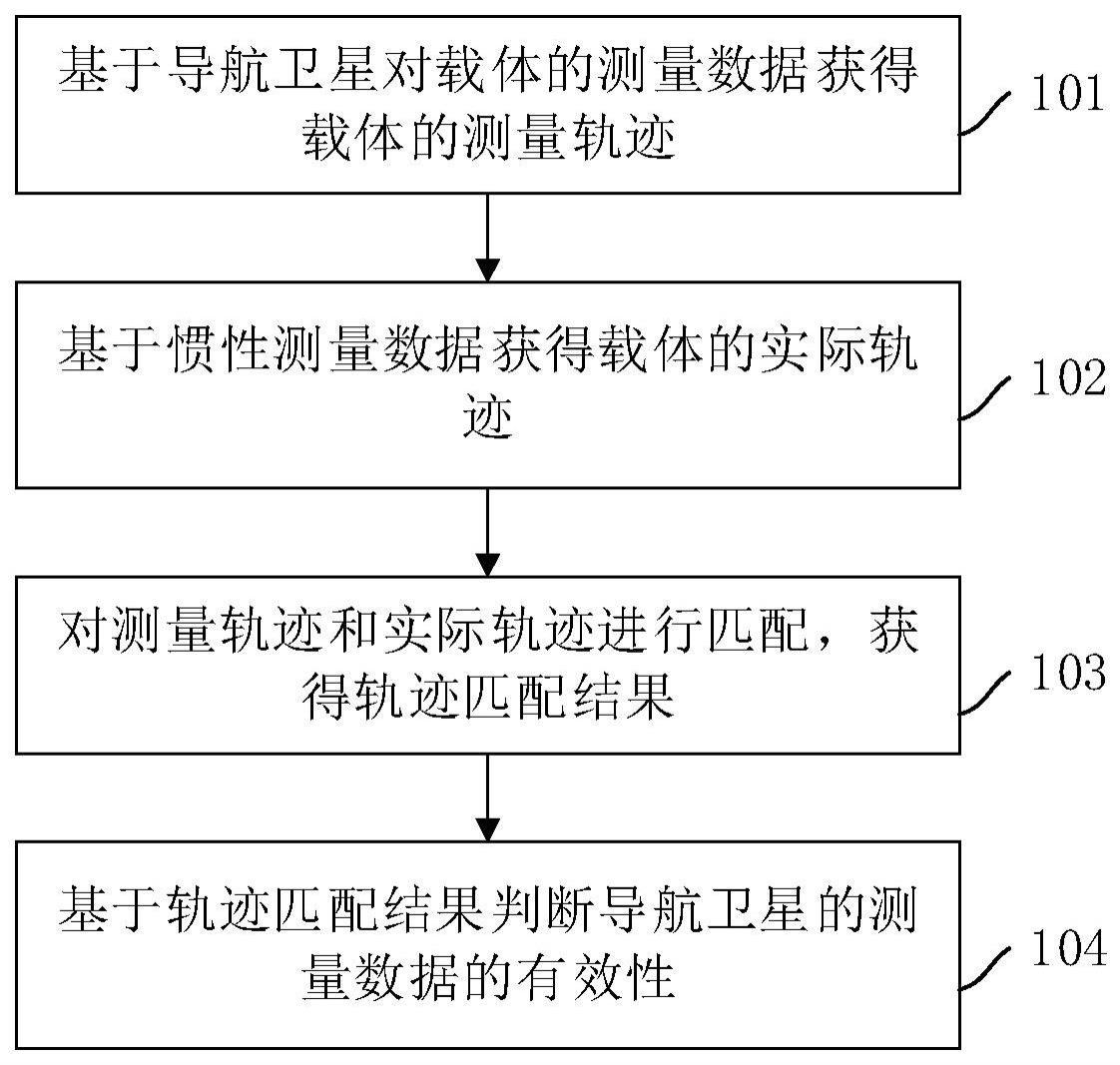
5、第一方面,本公开实施例提供一种卫星导航数据的有效性的判断方法,其包括:
6、基于卫星导航系统对载体的测量数据获得所述载体的测量轨迹;
7、基于惯性测量数据获得所述载体的实际轨迹;
8、对所述测量轨迹和实际轨迹进行匹配,获得轨迹匹配结果;
9、基于所述轨迹匹配结果判断所述卫星导航系统的测量数据的有效性。
10、在一些实施例中,所述对所述测量轨迹和实际轨迹进行匹配,获得轨迹匹配结果,包括:
11、根据所述测量轨迹上的测量点在所述实际轨迹上寻找与其距离最近的实际点,获得近距点对集;
12、调整所述近距点对集中测量点的位置,获得调整点对集;
13、利用所述调整点对集中的调整点和对应的所述实际点进行迭代计算所述调整点和实际点的平均误差,直至满足预设的迭代停止条件,并获得迭代结果;
14、基于所述迭代结果获得所述匹配结果。
15、在一些实施例中,所述基于迭代结果获得所述匹配结果,包括:
16、当所述迭代结果为达到迭代次数阈值时,确定匹配结果为所述测量轨迹和实际轨迹不匹配;
17、当所述迭代结果为达到误差阈值时,确定匹配结果为所述测量轨迹和实际轨迹匹配。
18、在一些实施例中,基于所述轨迹匹配结果判断所述卫星导航系统的测量数据的有效性,包括:
19、在所述轨迹匹配结果为轨迹形状匹配时,所述卫星导航系统的测量数据为有效;
20、在所述轨迹匹配结果为轨迹形状不匹配时,所述卫星导航系统的测量数据为无效。
21、在一些实施例中,所述方法还包括:
22、基于卫星导航系统对载体的测量数据获得所述载体的测量行驶距离;
23、基于惯性测量数据获得所述载体的实际行驶距离;
24、计算所述测量行驶距离和所述实际行驶距离获得距离差值;
25、基于所述轨迹匹配结果和距离差值判断所述卫星导航系统的测量数据的有效性。
26、在一些实施例中,所述基于所述轨迹匹配结果和距离差值判断所述卫星导航系统的测量数据的有效性,包括:
27、所述轨迹匹配结果为轨迹形状匹配,且所述距离差值小于预设的距离阈值时,所述卫星导航系统的测量数据为有效。
28、在一些实施例中,所述方法还包括:
29、基于卫星导航系统对载体的测量航向角获得所述载体的测量角度旋转变化量;
30、基于惯性测量航向角获得所述载体的实际角度旋转变化量;
31、基于所述测量角度旋转变化量和所述实际角度旋转变化量获得角度旋转变化量差值;
32、基于所述测量航向角获得航向角方差,并基于所述航向角方差获得航向角稳定度;
33、获取星数和所述载体的实际速度;
34、基于所述轨迹匹配结果、所述星数、所述载体的实际速度、所述角度旋转变化量差值、航向角差值和所述航向角稳定度判断所述卫星导航系统的测量数据的有效性。
35、在一些实施例中,所述基于所述轨迹匹配结果、所述星数、所述载体的速度、所述角度旋转变化量差值、航向角变化值、积累航向角差值和所述航向角稳定度判断所述卫星导航系统的测量数据的有效性,包括:
36、在无静电反射情况下,依据所述星数、所述载体的实际速度、所述航向角变化值、所述积累航向角差值判断所述卫星导航系统的测量数据的有效性;
37、在有静电反射情况下,依据所述星数、所述载体的实际速度、所述航向角变化值、所述积累航向角差值、所述航向角方差判断所述卫星导航系统的测量数据的有效性。
38、第二方面,本公开实施例提供一种卫星导航数据的有效性的判断装置,其包括:
39、测量轨迹获得模块,用于基于卫星导航系统对载体的测量数据获得所述载体的测量轨迹;
40、实际轨迹获得模块,用于基于惯性测量数据获得所述载体的实际轨迹;
41、轨迹匹配模块,用于对所述测量轨迹和实际轨迹进行匹配,获得轨迹匹配结果;
42、有效性判断模块,用于基于所述轨迹匹配结果判断所述卫星导航系统的测量数据的有效性。
43、在一些实施例中,所述轨迹匹配模块,包括:
44、近距点对集生成单元,用于根据所述测量轨迹上的测量点在所述实际轨迹上寻找与其距离最近的实际点,获得近距点对集;
45、位置调整单元,用于调整所述近距点对集中测量点的位置,获得调整点对集;
46、计算单元,用于利用所述调整点对集中的调整点和对应的所述实际点进行迭代计算所述调整点和实际点的平均误差,直至满足预设的迭代停止条件,并获得迭代结果;
47、匹配结果获得单元,用于基于所述迭代结果获得所述匹配结果。
48、在一些实施例中,所述装置还包括:
49、测量行驶距离获得模块,用于基于卫星导航系统对载体的测量数据获得所述载体的测量行驶距离;
50、实际行驶距离获得模块,用于基于惯性测量数据获得所述载体的实际行驶距离;
51、距离差值计算模块,用于计算所述测量行驶距离和所述实际行驶距离获得距离差值;
52、所述有效性判断模块,还用于基于所述轨迹匹配结果和距离差值判断所述卫星导航系统的测量数据的有效性。
53、在一些实施例中,所述装置还包括:
54、测量角度变化量获得模块,用于基于卫星导航系统对载体的测量数据获得所述载体的测量角度旋转变化量;
55、实际角度变化量获得模块,用于基于惯性测量数据获得所述载体的实际角度旋转变化量和所述载体的实际速度;
56、航向角计算模块,用于基于所述测量角度旋转变化量和所述实际角度旋转变化量获得角度旋转变化量差值、航向角差值和积累航向角差值;
57、稳定度获得模块,用于基于所述测量航向角获得航向角方差,并基于所述航向角方差获得航向角稳定度;
58、星数获得模块,用于获取星数;
59、所述有效性判断模块,还用于基于所述轨迹匹配结果、所述星数、所述载体的实际速度、所述角度旋转变化量差值、航向角差值和所述航向角稳定度判断所述卫星导航系统的测量数据的有效性。
60、第三方面,本公开实施例提供一种电子设备,其包括:
61、一个或多个处理器;
62、存储器,其上存储有一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器上述任意一种卫星导航数据的有效性的判断方法;
63、一个或多个i/o接口,连接在所述处理器与存储器之间,配置为实现所述处理器与存储器的信息交互。
64、第四方面,本公开实施例提供一种计算机可读介质,其上存储有计算机程序,所述程序被处理器执行时实现上述任意一种卫星导航数据的有效性的判断方法。
65、本公开实施例提供的卫星导航数据的有效性的判断方法,基于卫星导航系统对载体的测量数据获得载体的测量轨迹;基于惯性测量数据获得载体的实际轨迹;对测量轨迹和实际轨迹进行匹配,获得轨迹匹配结果;基于轨迹匹配结果判断卫星导航系统的测量数据的有效性。该卫星导航数据的有效性的判断方法可以大大提高卫星导航数据的有效性的准确性,使惯性导航更准确,从而提高惯性导航的整体性能。
技术实现思路
- 还没有人留言评论。精彩留言会获得点赞!