手持式三坐标测量设备及三维测量系统
1.本发明属于测量设备技术领域,具体涉及一种手持式三坐标测量设备及三维测量系统。
背景技术:
2.随着科技的发展,对于测量设备的性能要求越来越高,测量设备的种类也层出不穷。三坐标测量设备是指能在六面体的空间范围内表现几何形状、长度及圆周分度等测量能力的设备,可进行高精度的测量,是一类重要的测量设备。
3.现有的三坐标测量设备主要分为机床式和手持式,机床式设备占用空间大,对于安装空间具有较高的要求,且容易出现不同人员操作导致测量结果出现偏差的问题;手持式设备体积较为小巧,对于空间的要求不高,可单手操作,还配备有可实现高精度三维测量的空间识别技术,有效提升了操作的便捷性和测量的准确度。但是,手持式测量设备的探头往往是可伸缩探头,当探头抵接于待测物体表面后探头产生伸缩动作,其伸缩动作与特征点的动作不一致,导致回程误差,降低测量精度,影响测量可靠性。
技术实现要素:
4.本发明实施例提供一种手持式三坐标测量设备及三维测量系统,旨在解决现有手持式测量设备中存在的测量时因回程误差导致测量精度不足的问题。
5.为实现上述目的,本发明采用的技术方案是:
6.第一方面,提供一种手持式三坐标测量设备,包括:
7.握持装置,前部形成连接壁,所述连接壁形成有连接通道;
8.特征标记装置,间隔设于所述握持装置的前侧,所述特征标记装置的前侧形成多个特征点,所述特征标记装置的后部形成向后延伸的连接轴,所述连接轴同轴插设于所述连接通道,并与所述连接通道的内壁间隔设置;
9.探针装置,固接于所述特征标记装置的下部;
10.复位装置,具有第一复位单元和第二复位单元,所述第一复位单元沿所述连接轴的周向设于所述连接轴和所述连接通道之间,并被配置有使所述连接轴保持与所述连接通道同轴状态的预紧力,所述第二复位单元设于所述连接壁与所述特征标记装置之间,并被配置有使所述特征标记装置向前远离所述连接壁的预紧力。
11.结合第一方面,在一种可能的实现方式中,所述连接轴沿第一路径设有多个,所述连接通道沿所述第一路径对应设有多个。
12.一些实施例中,所述探针装置包括探测球头和连接柱,所述连接柱的上端固定于所述特征标记装置,下端连接有所述探测球头,所述连接柱的下端相对于所述第一路径向后倾斜预设角度,所述预设角度为10
°
~20
°
。
13.结合第一方面,在一种可能的实现方式中,所述特征标记装置的前侧面为凹凸状侧面,所述凹凸状侧面的凸出区域和凹陷区域分别设有形成有多个特征点,其中至少一个
所述凸出区域和/或所述凹陷区域上的多个所述特征点呈三角形分布。
14.结合第一方面,在一种可能的实现方式中,所述特征标记装置包括:
15.特征点载体,后侧形成所述连接轴;
16.点光源,设于所述特征点载体;
17.导光柱,罩设于所述点光源的前侧,所述导光柱的外周面和前侧面均覆盖有掩膜板;以及
18.镜片,盖设于所述导光柱的前部;
19.所述点光源、所述导光柱、所述镜片和所述掩膜板形成所述特征点。
20.一些实施例中,覆盖于所述导光柱前侧的所述掩膜板的前侧面还覆盖有散光层。
21.一些实施例中,所述特征点载体为向后开口的壳体结构,所述手持式三坐标测量设备还包括姿态传感装置,所述姿态传感装置包括信号发射器、信号接收器和遮挡件,所述信号发射器和所述信号接收器分别设于所述特征点载体内腔的相对两侧壁,所述遮挡件上开设有信号通孔,所述遮挡件固定于所述连接壁,且位于所述信号发射器和所述信号接收器之间,所述信号通孔能与所述信号接收器和所述信号发射器的信号传输路径对应。
22.一些实施例中,所述信号发生器和所述信号接收器的其中之一沿第二路径与所述特征点载体滑动适配,所述第二路径垂直于所述信号发生器和所述信号接收器的分布路径。
23.结合第一方面,在一种可能的实现方式中,所述握持装置包括手柄和连接板,所述手柄形成向前开口的避位空腔,所述连接板固定于所述避位空腔的开口处,所述连接板上形成有过孔,所述过孔的后端面沿自身周向形成向后延伸的挡板,所述挡板的围合区域与所述过孔配合形成所述连接通道,所述第一复位单元位于所述挡板和所述连接轴之间。
24.本技术实施例所示的方案,与现有技术相比,由于连接轴与连接通道之间,以及握持装置与特征标记装置之间的间隔设置,握持装置与特征标记装置之间具有一定的可活动自由度;测量过程中,探针装置与待测物接触,由于探针装置与特征标记装置之间相对固定,在相机识别特征点以完成对设备位姿解算的过程中,探针装置始终和特征标记装置同步的与握持装置发生相对的移动,使探针装置始终与特征标记装置运动轨迹一致,即两者在相机中识别到的位姿相同,避免了探针装置单独运动时与特征标记装置位姿不一致造成的识别误差,从而保证探针装置在测量过程中始终保持与特征点一致的位姿解算结果;并且,由于设置了第一复位单元和第二复位单元,在与待测物分离后(即撤销外力后),特征标记装置和探针装置在弹性力的作用下恢复到初始位置,完成设备的检测状态,保证下一次测量的可靠性。
25.第二方面,本发明实施例还提供了一种三维测量系统,包括工作台、相机及上述的手持式三坐标测量设备,所述相机置于所述工作台的一侧,所述工作台支撑待测物,所述探针装置能与所述待测物接触,且所述特征点朝向所述相机。
26.本技术实施例所示的方案,与现有技术相比,通过采用上述的手持式三坐标测量设备,避免测量过程中产生回程误差,有效提升的测量的精确度和可靠性。
附图说明
27.图1为本发明实施例提供的三维测量系统的工作状态图;
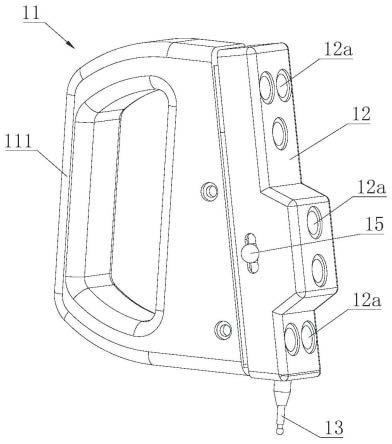
28.图2为本发明实施例提供的手持式三坐标测量设备的立体结构示意图;
29.图3为本发明实施例采用的握持装置的立体结构示意图;
30.图4为本发明实施例采用的连接板和特征标记装置的装配示意图;
31.图5为本发明实施例采用的连接板的立体结构示意图;
32.图6为图5的c部放大图;
33.图7为本发明实施例采用的特征标记装置和姿态传感装置的装配示意图一;
34.图8为本发明实施例采用的特征标记装置和姿态传感装置的装配示意图二;
35.图9为本发明实施例采用的探针装置与特征点载体的装配放大图;
36.图10为本发明实施例采用的特征点的结构示意图;
37.图11为本发明实施例的俯视结构剖视图一;
38.图12为图11的a部放大图;
39.图13为本发明实施例的俯视结构剖视图二;
40.图14为图13的b部放大图。
41.附图标记说明:
42.1、手持式三坐标测量设备;
43.11、握持装置;11a、连接通道;11b、连接壁;111、手柄;112、连接板;113、挡板;114、安装板;
44.12、特征标记装置;12a、特征点;121、连接轴;122、特征点载体;122a、导向槽;123、点光源;124、导光柱;125、镜片;126、掩膜板;127、限位体;
45.13、探针装置;131、探测球头;132、连接柱;
46.14、复位装置;141、第一复位单元;1411、连接片;1412、弹性片;142、第二复位单元;
47.15、姿态传感装置;151、信号发射器;152、信号接收器;153、遮挡件;154、信号通孔;155、导轨;156、安装座;157、调节手柄;
48.2、相机;
49.3、待测物;
50.4、工作台。
具体实施方式
51.为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
52.本发明的权利要求书、说明书及上述附图中,除非另有明确限定,如使用术语“第一”、“第二”或“第三”等,都是为了区别不同对象,而不是用于描述特定顺序。
53.本发明的权利要求书、说明书及上述附图中,除非另有明确限定,对于方位词,如使用术语“中心”、“横向”、“纵向”、“水平”、“垂直”、“顶”、“底”、“内”、“外”、“上”、“下”、“前”、“后”、“左”、“右”、“顺时针”、“逆时针”、“高”、“低”等指示方位或位置关系乃基于附图所示的方位和位置关系,且仅是为了便于叙述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位或以特定的方位构造和操作,所以也不能理解为限制本
发明的具体保护范围。
54.本发明的权利要求书、说明书及上述附图中,除非另有明确限定,如使用术语“固接”或“固定连接”,应作广义理解,即两者之间没有位移关系和相对转动关系的任何连接方式,也就是说包括不可拆卸地固定连接、可拆卸地固定连接、连为一体以及通过其他装置或元件固定连接。
55.本发明的权利要求书、说明书及上述附图中,如使用术语“包括”、“具有”以及它们的变形,意图在于“包含但不限于”。
56.请一并参阅图2至图14,现对本发明提供的手持式三坐标测量设备进行说明。所述手持式三坐标测量设备1,包括握持装置11、特征标记装置12、探针装置13和复位装置14;握持装置11的前部形成连接壁11b,连接壁11b形成有连接通道11a;特征标记装置12间隔设于握持装置11的前侧,特征标记装置12的前侧形成多个特征点12a,特征标记装置12的后部形成向后延伸的连接轴121,连接轴121同轴插设于连接通道11a,并与连接通道11a的内壁间隔设置;探针装置13固接于特征标记装置12的下部;复位装置14具有第一复位单元141和第二复位单元142,第一复位单元141沿连接轴121的周向设于连接轴和连接通道11a之间,并被配置有使连接轴121保持与连接通道11a同轴状态的预紧力,第二复位单元142设于连接壁11b与特征标记装置12之间,并被配置有使特征标记装置12向前远离连接壁11b的预紧力。
57.本实施例中,第一复位单元141以环绕连接轴121设置为宜,这种设置方式能够实现万向复位,适用于多种姿态的变化,有效提升了使用的便捷性。
58.本实施例中,第二复位单元142能够在前后方向上提供缓冲及限位,避免特征标记装置12磕碰到握持装置11,同时也能提供特征标记装置12的弹性复位作用力,保证复位的可靠性。
59.本实施例提供的手持式三坐标测量设备,与现有技术相比,由于连接轴121与连接通道11a之间,以及握持装置11与特征标记装置12之间的间隔设置,握持装置11与特征标记装置12之间具有一定的可活动自由度;测量过程中,探针装置13与待测物3接触,由于探针装置13与特征标记装置12之间相对固定,在相机2识别特征点以完成对设备位姿解算的过程中,探针装置13始终和特征标记装置12同步的与握持装置11发生相对的移动,使探针装置13始终与特征标记装置12运动轨迹一致,即两者在相机中识别到的位姿相同,避免了探针装置13单独运动时与特征标记装置12位姿不一致造成的识别误差,从而保证探针装置13在测量过程中始终保持与特征点12a一致的位姿解算结果;并且,由于设置了第一复位单元141和第二复位单元142,在与待测物3分离后(即撤销外力后),特征标记装置12和探针装置13在弹性力的作用下恢复到初始位置,完成设备的检测状态,保证下一次测量的可靠性,可进行实时检测,适用范围广。
60.一些实施例采用如图11及图12所示结构。参见图11及图12,为了保证受力均匀性及装配可靠性,第二复位单元142沿连接轴121的周向环设于连接轴121的外周。具体实施时,第二复位单元142可采用弹性套的结构,套装在连接轴121的外周;另外,为了更好的适应特征标记装置12姿态的改变,第二复位单元142的外径从后向前逐渐减小,更方便发生弹性形变。其中,第二复位单元142的材质包括但不限于弹性橡胶材质。
61.在一些实施例中,为了避免连接轴121脱出连接通道11a,同时方便装卸,连接轴
121的后端可拆卸的连接有限位体127,限位体127的前侧面与连接通道11a的后端面配合限位,如图4、图7、图8、图11及图12所示。具体实施时,连接轴121与限位体127之间的可拆卸连接方式包括但不限于螺纹连接、插接等,在此不再一一列举。
62.在一些实施例中,上述特征a可以采用如图3至图8所示结构。参见图3至图8,连接轴121沿第一路径设有多个,连接通道11a沿第一路径对应设有多个。
63.在一些实施例中,上述探针装置13可以采用如图2、图7至图9所示结构。参见图2、图7至图9,探针装置13包括探测球头131和连接柱132,连接柱132的上端固定于特征标记装置12,下端连接有探测球头131,连接柱132的下端相对于第一路径向后倾斜预设角度,预设角度为10
°
~20
°
(例如12
°
、15
°
、18
°
)。本实施例通过合理设置连接柱132的倾斜角度,使探针部分测量时能够垂直于待测物3且保证特征点12a完整暴露于相机2的视野内,既符合用户测量时的测量要求,又能够提升使用便捷性和用户体验感。其中,探测球头131的采用石英材质,连接柱132采用不锈钢材质。
64.具体实施时,连接柱132的上端形成外螺纹,特征标记装置12下端形成螺孔,连接柱132与特征标记装置12之间螺接适配,两者之间的连接结构简单,且连接可靠,使用时不会出现连接柱132相对于特征标记装置12移动的现象。
65.一些实施例采用如图2所示结构。参见图2,特征标记装置12的前侧面为凹凸状侧面(形成高低差),凹凸状侧面的凸出区域和凹陷区域分别设有形成有多个特征点12a,其中至少一个凸出区域和/或凹陷区域上的多个特征点12a呈三角形分布。本实施例通过采用凹凸状侧面及三角形分布方式,使特征点12a形成非共面的立体分布,在手持式三坐标测量设备1进行空间运动时存在一个唯一的编码顺序,避免了位姿模糊现象对设备空间位姿估计的影响,提高特征点12a的可视性,同时提升测量精度和稳定性。
66.在上述实施例的基础上,为了更可靠的保证在手持式三坐标测量设备1进行空间运动时存在一个唯一的编码顺序,在仅有部分的凸出区域或凹陷区域设置三角形分布的特征点12a的前提下,其余凸出区域和凹陷区域可采用直线分布方式,且不同的区域之间的分布路径均不同。以图2所示实施例进行举例说明,最上方的凹陷区域采用三角形分布的方式,中部的凸出区域采用竖向分布方式,下方的凹陷区域则采用横向分布方式,中部凸出区域的特征点分布路径与下部凹陷区域的特征点分布路径呈直角;当然,不同区域的路径并不限于相互垂直,也可以呈其他大于0
°
的角度设置,在此不再一一列举。
67.在一些实施例中,上述特征标记装置12可以采用如图10所示结构。参见图10,特征标记装置12包括特征点载体122、点光源123、导光柱124和镜片125;特征点载体122的后侧形成连接轴121;点光源123设于特征点载体122;导光柱124罩设于点光源123的前侧,导光柱124的外周面和前侧面均覆盖有掩膜板126;镜125片盖设于导光柱124的前部;点光源123、导光柱124、镜片125和掩膜板126形成特征点12a。具体实施时,特征点载体122的前侧壁开设有通孔,点光源123和导光柱124均正对通孔,镜片125盖设于通孔处,同时,镜片125还需要贴合于导光柱124前侧的掩膜板126。本实施例中,点光源123向前出光,其实施方式包括但不限于红外发光二极管,例如850nm波长的红外发光二极管(ir-led)红外发光二极管产生的光源有很好的稳定性,除此之外还有亮度高、功耗低、体积小以及无特殊供电设备要求等优点;导光柱124的材质包括但不限于透明亚克力材质,亚克力是一种重要可塑性高分子材料,具有较好的透明性、化学稳定性,易染色、易加工,对发光二极管具有良好的导光
性;镜片125的实施方式包括但不限于手机镜头的镜片。本实施例通过设置掩膜板126,能对点光源123的出光光线进行修正,使光束更加符合圆形的特征,便于相机2识别;另外,镜片125可以保证特征点12a的绝对圆度。
68.在上述实施例的基础上,为进一步修正点光源123的光线,在导光柱124的后侧面也覆盖掩膜板126。
69.在一些实施例中,覆盖于导光柱124前侧的掩膜板126的前侧面还覆盖有散光层。散光层除了遮挡和吸收杂光之外,还能够发散点光源123产生的背光光源,使相机2成像时光源更均匀,标志点特征更清晰。
70.在一些实施例中,为了使光线更加均匀的发散,导光柱124的前侧面为粗糙面。
71.一些实施例采用如图2、图7、图8、图13及图14所示结构。参见图2、图7、图8、图13及图14,特征点载体122为向后开口的壳体结构,手持式三坐标测量设备1还包括姿态传感装置15,姿态传感装置15包括信号发射器151、信号接收器152和遮挡件153,信号发射器151和信号接收器152分别设于特征点载体122内腔的相对两侧壁,遮挡件153上开设有信号通孔154,遮挡件153固定于连接壁11b,且位于信号发射器151和信号接收器152之间,信号通孔154能与信号接收器151和信号发射器152的信号传输路径对应。其中,信号发射器151和信号接收器152构成感测模块。
72.在初始状态(未接触待测物3的状态)下,信号通孔154正对信号接收器151和信号发射器152的信号传输路径。在探头装置13的下端有效接触到待测物3时(两者之间产生一定的接触压力),连接壁11b上的遮挡件153会随着握持装置11与特征标记装置12及探头装置13发生相对移动,使遮挡件153上的信号通孔154随之移动,遮挡信号接收器151和信号发射器152的信号传输路径,改变感测模块的电平信号,即可判定探头装置13已接触待测物3;相应地,在探头装置13离开待测物3时,遮挡件153回位,信号接收器151和信号发射器152的信号传输路径重新导通,电平信号再次改变,此时可判定探头装置13离开待测物3。通过感测模块电平信号的改变即可方便的判定探头装置13是否有效接触待测物3,保证测量结果的准确性。
73.本实施例的特征点载体122为立体构件,其前侧面也凹凸不平,机加工的难度较高,故而可选用3d打印机进行快速成型。
74.一些实施例采用如图2、图7、图8、图13及图14所示结构。参见图2、图7、图8、图13及图14,为了实现对信号发生器151和信号接收器152相对位置的调试,保证两者的信号传输路径在初始状态下能穿过信号通孔154,信号发生器151和信号接收器152的其中之一沿第二路径与特征点载体122滑动适配,第二路径垂直于信号发生器151和信号接收器152的分布路径。本实施例示出的第二路径为沿上下方向延伸的路径。
75.在一些实施例中,信号发生器151和信号接收器152均为光纤传感器,其主要包括放大器本体和光纤,电平信号的改变会通过放大器显示对应的信息。放大器本体上是控制中心,包含最基本的发光单元以及接受感应单元,放大器本体上有两个光纤连接接口,安装时将光纤插入光纤接口,然后通过锁扣卡紧就可以牢牢将光纤插进放大器本体,不容易脱落下来,形成完整的光电传感器。在实际使用中,由于特征点载体122内部的检测空间很小,故而将放大器本体安装在外部(握持装置11中),而将光纤独自安装在特征点载体122之内,只要光纤能够随着特征点载体122同步移动即可实现对特征点载体122位姿的感测。
76.与传统的各类传感器相比,光纤传感器用光作为敏感信息的载体,用光纤作为传递敏感信息的媒质,具有光纤及光学测量的特点,有一系列独特的优点:传感器端无需供电,是无源器件;电绝缘性能好,抗高电磁干扰能力强;高灵敏度,容易实现对被测信号的远距离监控;耐腐蚀,防爆,本质安全,各种恶劣或易燃易爆危险环境下可用;光路有可挠曲性,便于与计算机联接;传输损耗小,传输容量大;可实现远距离遥控监测和多点分布式测量,且测量速度快。
77.一些实施例采用如图7及图8所示结构。参见图7及图8,特征点载体122之内设有导轨155,导轨155上滑动连接有安装座156,信号发生器151和信号接收器152的其中之一连于安装座156;特征点载体122的侧壁上形成有与安装座125对应的导向槽122a,调节手柄157滑动穿设于导向槽122a,且伸入端螺接于安装座156的调节孔,通过拧松调节手柄157,即可调节安装座156的位置,调节到位后再拧紧调节手柄157即可。
78.在一些实施例中,信号发生器151和信号接收器152的其中之另一插接于特征点载体122侧壁上形成的多边形插槽。
79.在一些实施例中,上述握持装置11可以采用如图2至图5、图11至图14所示结构。参见图2至图5、图11至图14,握持装置11包括手柄111和连接板112,手柄111形成向前开口的避位空腔,连接板112固定于避位空腔的开口处,连接板112上形成有过孔,过孔的后端面沿自身周向形成向后延伸的挡板113,挡板113的围合区域与过孔配合形成连接通道11a,第一复位单元141位于挡板113和连接轴121之间。具体实施时,挡板113沿过孔的周向间隔设有多个(例如四个、六个等),每个挡板113上均连接第一复位单元141。
80.一些实施例采用如图5及图6所示结构。参见图5及图6,第一复位单元141包括连接片1411和弹性片1412,连接片1411固接于挡板113的内侧面,弹性片1412的一侧缘与连接片1411的内侧缘连接,另一侧缘与挡板113间隔设置。
81.一些实施例采用如图3至图5所示结构。参见图3至图5,连接板112的后侧形成有安装板114,安装板114和手柄111之间通过紧固件固定,其中,紧固件的实施方式包括但不限于螺纹连接件、销钉、直插式卡扣等。
82.一些实施例采用如图1及图2所示结构。参见图1及图2,手柄111的后侧面为平面,方便闲置时的放置。
83.基于同一发明构思,本技术实施例还提供一种三维测量系统,参阅图1,所述三维测量系统包括工作台4、相机2及上述的手持式三坐标测量设备1,相机2置于工作台4的一侧,工作台4支撑待测物3,探针装置13能与待测物3接触,且特征点12a朝向相机。
84.本实施例提供的三维测量系统,与现有技术相比,通过采用上述的手持式三坐标测量设备1,避免测量过程中产生回程误差,有效提升的测量的精确度和可靠性。
85.本技术三维测量系统的使用方式大致如下:
86.1)探针装置13接触待测物3至感测模块的光电信号改变,此时特征标记装置12向探针装置13所受外力方向的相反方向倾斜,第一复位单元141和第二复位单元142也朝该方向变形;
87.2)由相机2拍摄并识别手持式三坐标测量设备1上的特征点12a并以此表征手持式三坐标测量设备1的实时位姿,通过移动手持式三坐标测量设备1完成对待测物3的测量;
88.3)测量完毕使探针装置13离开待测物3,连接轴121会在第一复位单元141和第二
复位单元142的作用下自动回位归中,同时连接板上挡板的圆孔归位,信号发生器151和信号接收器152之间的信号传输路径再次导通,放大器显示对应光电信号的改变,表示完成测量。
89.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1