具有自主决策功能的自动化X射线探伤方法及装置与流程
本发明属于x光探伤,具体地说,尤其涉及一种具有自主决策功能的自动化x射线探伤方法及装置。
背景技术:
1、x光探伤技术是一种重要的无损探伤技术,他可以在不破坏被测物体的情况对被测物体内部质量进行检测,广泛应用于铸造、锻造、焊接等成型专业。目前广泛使用的x光探伤方法有传统的布放探伤底片式和实时成像x光探伤技术。传统的布放探伤底片式的x光探伤方法需要手工布放底片,人工移动被测物体,需要冲洗底片,因此存在工作效率低、人员劳动强度大、人员受辐射危害等缺点。目前常用的实施成像x光探伤设备往往只是配置了一个转台用于工件位置的调整,实现了半自动化,效率高于手工布片式,但是对于结构复杂的被测物体,其适应性较差,无法将x光探头调整至垂直于被测物体表面,拍出的影像失真较为严重。同时不管是传统的布放探伤底片式和实时成像x光探伤技术都需要在进行x光探伤前对被测物体的厚度进行手工测量,再由操作人员确定x光探伤参数,手工将参数输入设备。对于结构复杂、壁厚变化较多的被测物体,手工测量和人员计算、确定参数并调整影响工作效率也容易出错。
2、因此,亟需开发一种克服上述缺陷的具有自主决策功能的自动化x射线探伤方法及装置。
技术实现思路
1、针对上述问题,本发明针对目前的x光探伤设备自动化水平不高、无法针对复杂结构被测物体进行适应性调整、被测物体厚度测量和x光探伤参数确定均由人工完成效率低等问题,提供一种具有自主决策功能的自动化x射线探伤方法,其中,包括:
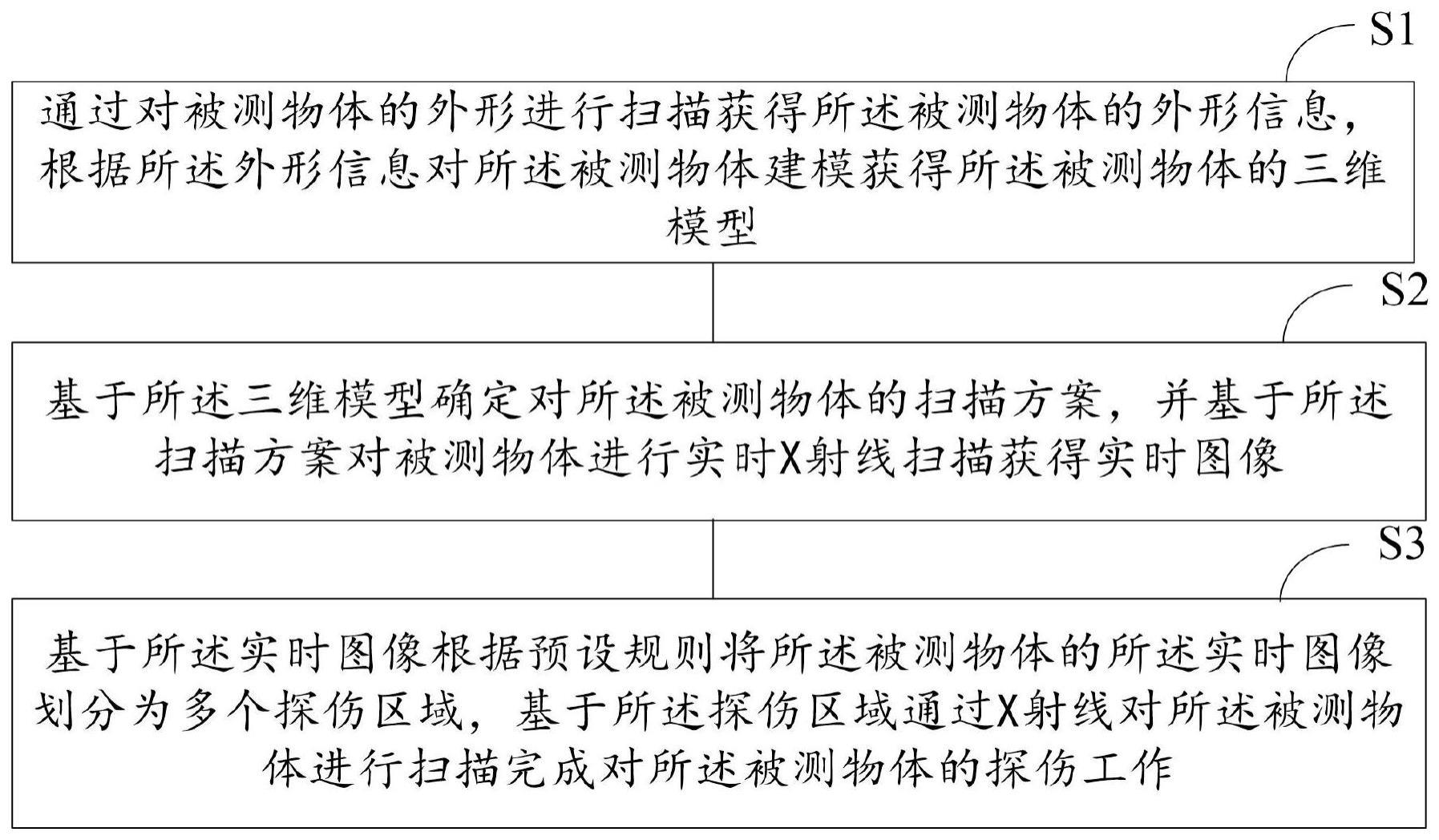
2、模型构建步骤:通过对被测物体的外形进行扫描获得所述被测物体的外形信息,根据所述外形信息对所述被测物体建模获得所述被测物体的三维模型;
3、x射线扫描步骤:基于所述三维模型确定对所述被测物体的扫描方案,并基于所述扫描方案对被测物体进行实时x射线扫描获得实时图像;
4、探伤步骤:基于所述实时图像根据预设规则将所述被测物体的所述实时图像划分为多个探伤区域,基于所述探伤区域通过x射线对所述被测物体进行扫描完成对所述被测物体的探伤工作。
5、上述的自动化x射线探伤方法,其中,所述模型构建步骤包括:
6、通过控制红外线的扫描位置对所述被测物体进行逐层扫描获得所述外形信息。
7、上述的自动化x射线探伤方法,其中,所述x射线扫描步骤包括:
8、基于所述三维模型构建针对所述被测物体的扫描方案,所述扫描方案包括扫描路径及扫描速度;
9、根据所述扫描方案控制x射线的扫描位置对被测物体进行扫描获得所述实时图像。
10、上述的自动化x射线探伤方法,其中,探伤步骤包括:
11、基于x射线的最佳测定面积将所述实时图像划分为多个探伤区域;
12、通过超声波对所述探伤区域进行扫描获得所述探伤区域的平整度信息,根据所述平整度信息确定所述探伤区域的探伤方案;
13、根据红外线扫描获得所述探伤区域的坐标调整x射线后,通过x射线所述探伤区域进行探伤,直至完成全部所述探伤区域的探伤。
14、上述的自动化x射线探伤方法,其中,探伤步骤包括:
15、根据红外线扫描获得所述探伤区域的坐标调整所述被测物体的位置。上述的自动化x射线探伤方法,其中,所述根据红外线扫描获得所述探伤区域的坐标调整x射线,包括:
16、根据所述探伤区域的坐标进行拟合获得拟合平面,调整x射线以垂直于所述拟合平面的方向所述探伤区域进行探伤。
17、上述的自动化x射线探伤方法,其中,所述根据所述平整度信息确定所述探伤区域的探伤方案,包括:
18、根据所述平整度信息确定探伤次数、探伤电流及曝光时间。
19、本发明还提供一种具有自主决策功能的自动化x射线探伤装置,其中,包括:
20、扫描单元,用于对被测物体的外形进行扫描获得所述被测物体的外形信息;
21、位置调节单元,用于装载所述扫描单元,通过所述位置调节单元调节所述扫描单元的扫描位置及/或所述被测物体的扫描位置;
22、控制单元,电性连接于所述扫描单元及所述位置调节单元;
23、其中,所述控制单元根据所述外形信息构建所述被测物体的三维模型并根据所述三维模型确定对所述被测物体的扫描方案,所述控制单元基于所述扫描方案控制所述扫描单元及/或所述位置调节单元对所述被测物体进行实时x射线扫描获得实时图像,所述控制单元基于所述实时图像根据预设规则将所述被测物体的所述实时图像划分为多个探伤区域后,所述控制单元通过控制所述扫描单元及/或所述位置调节单元基于所述探伤区域对所述被测物体的进行x射线扫描完成对所述被测物体的探伤工作。
24、上述的自动化x射线探伤装置,其中,所述扫描单元包括:
25、一体化探头,电性连接于所述控制单元,所述一体化探头包括:x射线探头、红外探头及超生探头,所述x射线探头用于对所述被测物体进行x射线扫描获得所述实图像;所述红外探头用于对所述被测物体进行红外扫描获得所述外形信息;所述超生探头用于对所述被测物体进行超声波扫描获得所述探伤区域的平整度信息;
26、多自由度角度头组件,所述一体化探头装设于所述多自由度角度头组件上,所述多自由度角度头组件装设于所述位置调节单元上且电性连接于所述控制单元;
27、其中,所述控制单元通过控制所述多自由度角度头组件以调节所述一体化探头的扫描位置。
28、上述的自动化x射线探伤装置,其中,所述位置调节单元包括:
29、导轨,
30、支撑梁,装设于所述导轨上,所述控制单元控制所述支撑梁沿所述导轨的方向在所述导轨上移动;
31、安装块,装设于所述支撑梁上,所述多自由度角度头组件装设于所述安装块上,所述控制单元控制所述安装块沿所述支撑梁的方向在所述支撑梁上移动;
32、回转工作台,电性连接于所述控制单元且用于承载所述被测物体;
33、其中,所述控制单元控制所述支撑梁及/或所述安装块移动以调节所述一体化探头的扫描位置,所述控制单元控制所述回转工作台带动所述被测物体转动以调节所述被测物体的扫描位置。
34、本发明相对于现有技术其功效在于:通过本发明在探伤时能够根据具有复杂结构的被测物体的结构对x光探伤参数进行自适应调整,大大提高了x射线探伤的自动化程度,且兼具成像效果好,人员受辐射伤害低的优势。
35、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书以及附图中所指出的结构来实现和获得。
技术特征:
1.一种具有自主决策功能的自动化x射线探伤方法,其特征在于,包括:
2.如权利要求1所述的自动化x射线探伤方法,其特征在于,所述模型构建步骤包括:
3.如权利要求1所述的自动化x射线探伤方法,其特征在于,所述x射线扫描步骤包括:
4.如权利要求1所述的自动化x射线探伤方法,其特征在于,探伤步骤包括:
5.如权利要求4所述的自动化x射线探伤方法,其特征在于,探伤步骤包括:
6.如权利要求4所述的自动化x射线探伤方法,其特征在于,所述根据红外线扫描获得所述探伤区域的坐标调整x射线,包括:
7.如权利要求4所述的自动化x射线探伤方法,其特征在于,所述根据所述平整度信息确定所述探伤区域的探伤方案,包括:
8.一种具有自主决策功能的自动化x射线探伤装置,其特征在于,包括:
9.如权利要求8所述的自动化x射线探伤方装置,其特征在于,所述扫描单元包括:
10.如权利要求9所述的自动化x射线探伤方装置,其特征在于,所述位置调节单元包括:
技术总结
本发明公开了一种具有自主决策功能的自动化X射线探伤方法及装置,自动化X射线探伤方法包括:模型构建步骤:通过对被测物体的外形进行扫描获得被测物体的外形信息,根据外形信息对被测物体建模获得被测物体的三维模型;X射线扫描步骤:基于所述三维模型确定对被测物体的扫描方案,并基于扫描方案对被测物体进行实时X射线扫描获得实时图像;探伤步骤:基于实时图像根据预设规则将被测物体的实时图像划分为多个探伤区域,基于探伤区域通过X射线对被测物体进行扫描完成对被测物体的探伤工作,本发明具有自动化程度高,且兼具成像效果好,人员受辐射伤害低的优势。
技术研发人员:任广笑,耿莹晶,王宁超,崔俊荣,申孝立,刘永哲,李沛森,马二波,曹喜娟,成波,王楠,魏成瑜
受保护的技术使用者:山西江淮重工有限责任公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!