一种集成化同步声波激励与激光全息散斑干涉检测系统及同步测量和条纹诊断方法
1.本发明涉及无损检测技术领域,具体而言,涉及一种声波激励与散斑干涉检测系统及条纹诊断方法。
背景技术:
2.近年来,利用技术信息保护艺术品得到了广泛的实践和研究。用于诊断和分析绘画、瓷器、壁画、漆器和雕塑等文物的非接触和非破坏性技术受到艺术保护人员的赞赏。非接触式仪器提供了一种容易接近和安全的方法来观察文物的各个组成部分。了解一件文物的结构和构成,可以让文物保护者有机会运用他们的知识,并推断出最合适的方法来修复和保存艺术品。用于诊断各种文物的光谱学和显微学等光学技术提供了它们的光谱信息,揭示了肉眼看不到的独特特征。现有的技术可以对文物进行原位成像,而不会造成永久性的物理损伤。有大量的技术运用在文物检测中,比如x射线成像分析历史绘画的底层结构、计算机视觉和机器学习算法在识别艺术家绘画风格和帆布特征方面的应用、激光全息术的各种用途、红外辐射在艺术品分析中的应用以及太赫兹辐射在绘画地层中可能缺陷区域成像中的应用等。在文物保护的实践过程中,在早期阶段识别缺陷能够为后续的保护和保存文物而采取有利和有效的综合措施提供理论依据。因此,如果能够通过模拟激励,根据条纹类别和量化变形找出初生的或不可见的缺陷并确定其特征。
3.常用的激励方式有振动模拟、暖光照射模拟、湿度升降模拟、激光辐照模拟以及声波激励模拟等,面对大型且不可移动的大型文物壁画样本时,只有声波激励能够实现无损和便携式的全局激励,对于文物的损害能够降至最低,同时由于声波的全局属性,能够针对大面积的壁画实现同步检测。
4.本发明基于经验的条纹分类,可以将声波激励与散斑干涉检测结合,利用时间同步技术,采集满足奈奎斯特采样定律的散斑干涉图,通过相位相减,可以得到测量区域的相位条纹分布,通过比对现有的条纹分类,可以对文物壁画进行病害诊断与评估,对于之后的文物保护措施提供参考。
5.专利申请号为cn202111458664.9的专利技术公开了一种多维度散斑干涉系统及实时测量方法中,公开了基于labview上位机的散斑干涉实时检测系统,但是存在以下缺陷:一是无法同时处理多幅全息图的相位恢复;二是在复杂的场景应用中缺乏灵活性和集成化,比如在声波激励时,声波信号与ccd拍照无法进行同步设置。
技术实现要素:
6.本发明的目的在于提供一种声波激励与散斑干涉检测系统及条纹诊断方法,本发明对大部分的墙面物体包括文物壁画进行非接触式无损检测,通过相位相减,诊断物体表面或亚表面的病害、损伤等;具有系统简单、便携、适用性广等优点,尤其在文物无损检测具有专业性的应用场景。
7.为达到上述目的,本发明采用如下技术方案:
8.一种集成化同步声波激励与激光全息散斑干涉检测系统,包括:
9.激光器,发出激光光源,波长为532nm,光纤激光输出功率为15mw;
10.光纤耦合器,接收激光器发出的激光光源,并产生两束1:99强度比例的光束;
11.第一光纤夹持器fg1,用于固定物光光源,具有二维微微调螺丝,可进行二维微调;
12.第二光纤夹持器fg2,用于固定参考光光源,具有二维微调节螺丝,可加以载波;
13.光阑as,用于物光和参考光返回ccd摄像机时的滤波过程;
14.凸透镜lens,用于缩小照射到被测物体之后垂直返回的干涉光束的像;
15.分光棱镜bs,透射与反射比为50:50;
16.衰减片a,用于降低参考光的光强;
17.带ccd摄像机的图像接收系统,ccd靶面的像素尺寸为2.4μm,用于接收发生在ccd平面的干涉图像,并传输至计算机;
18.定制化封装壳体,用于集成和固定上述光学器件;
19.声波信号发生器,可输入电压为-20dbv至20dbv,频段可选范围为100hz至20khz,声波发生模式为扫频模式,设置每个频段的持续时间设置范围;
20.声波信号放大器,用于将电信号转化为声波信号;
21.三脚架移动平台,用于放置定制化封装壳体、声波信号发生器和声波信号放大器,提供便携的移动功能;
22.计算机为labview上位机,对带ccd摄像机的图像接收系统采集到的物体表面的数据进行处理;
23.各光纤夹持器和反射镜都固定在二维微调调节平台上,用于调节加载载波信息;
24.激光器发出的激光光源经过光纤耦合器后分为两束强度比1:99的光束,两根光纤接入定制化壳体的两侧,然后分别被两个光纤夹持器(fibergripper)固定夹持,得到两束球面波光束;第一光纤夹持器fg1上的光纤发出的物光光束l1穿出定制化壳体预留的孔hole,照射到物体表面,物体表面发生了漫反射,反射光l2经过凸透镜lens,穿过光阑as(aperture stop)以及透射过分光棱镜bs(beamsplitter),到达ccd平面;同时第二光纤夹持器fg2上的光纤发出参考光光束l3经过衰减片a(attenuation),降低参考光的光强,而后经过分光棱镜bs反射,在ccd平面与物光反射回的反射光l2发生干涉;声波信号发生器发出声波信号,经过声波信号放大器后,产生激励声波s,倾斜照射在物体表面;设置带ccd摄像机的图像接收系统的曝光时间和采样时间;在声波激励之前,ccd摄像机拍摄下初始的散斑干涉图。
25.优选地,所述定制化封装壳体可独立装卸和运输,用于现场便携式勘测与移动式测量。
26.优选地,声波信号发生器根据ccd摄像机的曝光时间,每个频率的持续时间为曝光时间的两倍,满足奈奎斯特采样定理。
27.优选地,定制化集成光路距离被测物的距离为123cm,避免由于声波振动引发的测量误差。
28.一种声波激励与数字全息散斑干涉的同步测量和条纹诊断方法,利用本发明所述的集成化同步声波激励与激光全息散斑干涉检测系统,其特征在于,具体包括如下步骤:
29.s100、声波与图像采集:
30.设置所述声波信号发生器,设置带ccd摄像机的图像接收系统;在声波激励之前,利用ccd摄像机拍摄下初始的散斑干涉图;
31.s200、图像保存:
32.利用labview上位机,将图像进行保存,确保在后续运算中选用与声波信号对应的数字全息散斑干涉图;
33.s300、傅里叶图像处理:
34.选取声波激励之后采集到的散斑干涉图,进行傅里叶变换,然后进行滤波处理,在进行消除载波,逆傅里叶变换,消除所述分别加载在离面相位信息的载波之后进行逆傅里叶变换,得到对应的两幅相位图;
35.s400、条纹降噪与诊断:
36.将两幅相位图进行相位相减操作,消除杂波;根据获取的经验条纹诊断表,对条纹进行病害评估。
37.优选地,所述步骤s100中的声波与图像采集步骤具体包括:
38.设置所述声波信号发生器,选择输入电压为5dbv,频段为100-800hz扫频模式,每个频率持续时间为4s;设置所述带ccd摄像机的图像接收系统,设置曝光时间为1.8s,采样时间为2s;在声波激励之前,所述ccd摄像机拍摄下初始的散斑干涉图。
39.优选地,所述步骤s200图像保存步骤具体包括:
40.所述labview上位机,将图像按照年-月-日-时-分-秒.bmp的格式进行保存,确保在之后的运算中能够准确的选用与声波信号对应的数字全息散斑干涉图。
41.优选地,所述步骤s300傅里叶图像处理步骤具体包括:
42.s301:选取声波激励之后采集到的散斑干涉图,按照时间排序,与声波发生信号相对应,为了减少计算量,将100-800hz的声波信号分为低频、中频和高频,在后续的条纹诊断中做初步的分类;
43.s302:傅里叶变换,获取所述变形前后的散斑干涉图像,进行傅里叶变换,显示出干涉图的频谱图,观察所述频谱分离情况并加以分析;
44.s303:画取所述频谱正一级,进行带通滤波,以初始全息图傅里叶频谱的正一级所在的载波量为基础,之后的任意散斑干涉图,都采取相同的带通滤波处理;
45.s304:消除载波,逆傅里叶变换,消除所述分别加载在离面相位信息的载波之后进行逆傅里叶变换,得到对应的两幅相位图。
46.进一步优选地,在所述步骤s301中,将100-800hz的声波信号分为低频100-250hz、中频251-500hz和高频501-800hz,在后续的条纹诊断中做初步的分类。
47.优选地,所述步骤s400条纹降噪与条纹诊断步骤具体包括:
48.所述两幅相位图进行相位相减操作,利用短时加窗傅里叶函数,进行消除杂波的操作;根据获取的经验条纹诊断表,对条纹进行病害评估;
49.所述计算机对采集到的声波激励过程中散斑干涉图像中包含的被测物体表面波信息进行分离,分离的方式是频谱分离。
50.优选地,在所述步骤s400中,获取的经验条纹诊断的经验条纹包括如下至少一种:
51.圈状条纹,特征是闭合和开放曲线,平滑方向变化,状态为连续曲线,可能的原因
为内部脱落或空隙;
52.弧凸条纹,特征是开放曲线,平滑方向变化,呈现连续曲线,可能的原因是内部裂纹或脱落;
53.密变条纹,通常与其他图案一起出现,条纹密度出现变化,可能是内部挤压或压缩造成的;
54.改向条纹,从一个方向到另一方向的突然方向变化,呈现连续的曲线分布,可能是材料或表面发生了变化。
55.本发明与现有技术相比较,具有如下显而易见的突出实质性特点和显著优点:
56.1.本发明系统结构集成度较高,操作简单,便于对不同文物壁画的集成化同步声波激励数字全息散斑干涉检测及条纹诊断,准确性较高;
57.2.文物壁画体型较大,相对固定不动,包含的制作材料成分复杂,在声波扫频过程中,不同材质对不同频段的声波产生不同的共振效果,呈现出不同的离面形变量,构建出对应的条纹类别;本发明在获取目标频段或者相位差的过程中,根据条纹类别的诊断,可获取该条纹的特征,并分析出此类病害的可能原因;
58.3.本发明具有无损、快速、全场扫描和高精度的特点,可用于珍贵文物样本的病害分析研究中。
附图说明
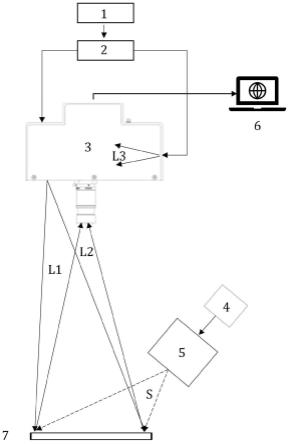
59.图1是本发明同步声波激励数字全息散斑干涉系统的原理示意图。
60.图2是本发明集成化数字全息散斑干涉系统的定制化壳体结构示意图。
61.图3是本发明同步声波激励与ccd摄像机图像采集方法步骤图。
62.图4是本发明傅里叶图像处理步骤以及条纹诊断步骤图。
63.图5是本发明条纹诊断参考经验图。
64.图6是本发明根据文物壁画样本的声波激励条纹诊断分析图。
具体实施方式
65.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合附图及实施例中的技术方案来详细说明本发明的实施方式,借此对本发明如何应用技术手段来解决技术问题,并达成技术效果的实现过程能充分理解并据以实施。显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
66.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。同时,在本发明的描述中,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
67.实施例一
68.一种集成化同步声波激励与激光全息散斑干涉检测系统,如图1和图2所示,包括:
69.如图1和图2所示,本实施例集成化同步声波激励与激光全息散斑干涉检测系统主要包括激光器1、光纤耦合器2、光阑as、分光棱镜bs、两个光纤夹持器、定制化封装壳体3、声波信号发生器4、声波信号放大器5、三脚架移动平台、带ccd(charge-coupleddevice,电荷
耦合元件)摄像机的图像处理接收系统、带labview上位机的计算机6,其中:
70.激光器1,发出激光光源,波长为532nm,光纤激光输出功率为15mw;
71.光纤耦合器2,接收激光器发出的激光光源,并产生两束1:99强度比例的光束;
72.第一光纤夹持器fg1,用于固定物光光源,具有二维微微调螺丝,可进行二维微调;
73.第二光纤夹持器fg2,用于固定参考光光源,具有二维微调节螺丝,可以加以载波;
74.光阑as,用于物光和参考光返回ccd摄像机时的滤波过程;
75.凸透镜lens,用于缩小照射到被测物体之后垂直返回的干涉光束的像;
76.分光镜bs,透射与反射比为50:50;
77.衰减片a,用于降低参考光的光强;
78.带ccd摄像机的图像接收系统,ccd靶面的像素尺寸为2.4μm,用于接收发生在ccd平面的干涉图像,并传输至计算机6;
79.定制化封装壳体3,用于集成和固定上述光学器件;
80.声波信号发生器4,可输入电压为-20dbv至20dbv,频段可选范围为100hz至20khz,声波发生模式为扫频模式,每个频段的持续时间设置范围为曝光时间的两倍左右;
81.声波信号放大器5,用于将电信号转化为声波信号;
82.三脚架移动平台,用于放置定制化封装壳体3、声波信号发生器4和声波信号放大器5,提供便携的移动功能;
83.计算机6,安装了labview上位机,对带ccd摄像机的图像接收系统采集到的数据进行处理。
84.在本实施例中,所述光纤夹持器和反射镜都固定在二维微调调节平台上,用于调节加载载波信息激光器1发出的激光光源经过光纤耦合器2后分为两束强度比1:99的光束,两根光纤接入定制化壳体3的两侧,然后分别被光纤夹持器(fibergripper)固定夹持,得到两束球面波光束。第一光纤夹持器fg1上的光纤发出的物光光束l1穿出定制化壳体预留的孔hole,照射到物体表面7,物体表面较为粗糙,因此发生了漫反射,反射光l2经过凸透镜lens,穿过光阑as(aperturestop)以及透射过分光棱镜bs(beamsplitter,透射和反射比为50:50),到达ccd平面;同时第二光纤夹持器fg2上的光纤发出参考光光束l3经过衰减片a(attenuation),适当的降低了参考光的光强,而后经过分光棱镜bs反射,在ccd平面与物光反射回的反射光l2发生干涉。声波信号发生器4选择输入电压为5dbv,频段为100-800hz扫频模式,每个频率持续时间为4s,经过声波信号放大器5后,产生激励声波s,倾斜照射在物体表面7。设置所述带ccd摄像机的图像接收系统,设置曝光时间为1.8s,采样时间为2s;在声波激励之前,所述ccd摄像机拍摄下初始的散斑干涉图。
85.本实施例的定制化封装壳体经过制作,已经形成了样机,并投入了使用。本发明对大部分的墙面物体包括文物壁画进行非接触式无损检测,通过相位相减,诊断物体表面或亚表面的病害、损伤等;具有系统简单、便携、适用性广等优点,尤其在文物无损检测具有专业性的应用场景。
86.实施例二
87.本实施例与上述实施例基本相同,特别之处在于:
88.在本实施例中,所述定制化封装壳体3可独立装卸和运输,用于现场便携式勘测与移动式测量。
89.在本实施例中,声波信号发生器4根据ccd摄像机的曝光时间,每个频率的持续时间为曝光时间的两倍,满足奈奎斯特采样定理。
90.在本实施例中,定制化集成光路距离被测物的距离为123cm,避免由于声波振动引发的测量误差。
91.在本实施例中,所述光纤夹持器和反射镜都固定在二维微调调节平台上,用于调节加载载波信息。本实施例集成化同步声波激励与激光全息散斑干涉检测系统具有集成化程度高、操作简单和结构紧凑的特点。
92.实施例三
93.本发明需要labview上位机的整合计算能力,如图3和图4所示,设计了基于labview上位机的基础算法、运行逻辑和测量方法,具体包括s100声波与图像采集同步步骤、s200图像保存步骤、s300傅里叶图像处理步骤和s400条纹降噪与诊断步骤,具体如下:
94.s100:声波与图像采集
95.设置所述声波信号发生器,选择输入电压为5dbv,频段为100-800hz扫频模式,每个频率持续时间为4s;设置所述带ccd摄像机的图像接收系统,设置曝光时间为1.8s,采样时间为2s;在声波激励之前,所述ccd摄像机拍摄下初始的散斑干涉图;
96.s200:图像保存
97.所述labview上位机,将图像按照年-月-日-时-分-秒.bmp的格式进行保存,确保在之后的运算中能够准确的选用与声波信号对应的数字全息散斑干涉图;
98.s300:傅里叶图像处理
99.s301:选取声波激励之后采集到的散斑干涉图,按照时间排序,与声波发生信号相对应,为了减少计算量,将100-800hz的声波信号分为低频、中频和高频,在后续的条纹诊断中做初步的分类;
100.s302:傅里叶变换,获取所述变形前后的散斑干涉图像,进行傅里叶变换,显示出所述干涉图的频谱图,观察所述频谱分离情况并加以分析;
101.s303:画取所述频谱正一级,进行带通滤波,以初始全息图傅里叶频谱的正一级所在的载波量为基础,之后的任意散斑干涉图,都采取相同的带通滤波处理;
102.s304:消除载波,逆傅里叶变换,消除所述分别加载在离面相位信息的载波之后进行逆傅里叶变换,得到对应的两幅相位图;
103.s400:条纹降噪与条纹诊断
104.所述两幅相位图进行相位相减操作,利用短时加窗傅里叶函数,进行消除杂波的操作;根据获取的经验条纹诊断表,对条纹进行病害评估;
105.所述计算机对采集到的声波激励过程中散斑干涉图像中包含的被测物体表面波信息进行分离,分离的方式是频谱分离。
106.所述带ccd摄像机的图像接收系统与计算机的连接通道为usb3.0。
107.所述分辨率,为5472*3648像素,所述s300步骤,将图片大小裁剪至3648*3648像素,提供8mm*8mm的视场,可降低了运算量,同时裁除的图像可为移动平台的移动提供参考,并且可用于后续的图像拼接算法。
108.本实施例需要将采集到的所有散斑干涉图包含的离面形变信息进行分离,以初始干涉图(未受声波激励)包含的初始相位φ0为基础,声波激励后采集到的干涉图,获得的相
位为φn,需要对初始相位φ0进行相位相减操作,以此获取当时的相位变化量δφn(即相位差)。分离的方式是频域分离,由于在声波激励前后,光路并未发生变化,因此在各自的频域提取相同的带通载波,则可实现所有相位差δφn的获取,为之后的条纹诊断作基础。
109.假设采集到的声波激励前的数字全息散斑干涉图的强度为i0(x,y),对其进行傅里叶变换得到耦合干涉图像的空间频率ft[i0(x,y)]:
[0110]
ft[i0(x,y)]=a(ff
x
,ffy)+c(ff
x-f
x
,ff
y-fy)+c
*
(ff
x
+f
x
,ffy+fy)(1)
[0111]
式(1)中,空间频谱a(ff
x
,ffy)以(ff
x
=0,ffy=0)为中心,携带背景信息;c(ff
x-f
x
,ff
y-fy)和c
*
(ff
x
+f
x
,ffy+fy)互为共轭项,分别以(ff
x
=f
x
,ffy=fy)和(ff
x
=-f
x
,ffy=-fy)为中心,其含有被测物离面的初始随机相位信息。f
x
和fy表示第二光纤夹持器fg2在其二维方向上的载波频率。
[0112]
在labview中设置了对频谱图进行处理的步骤,在频谱图中通过划出椭圆或者方框,将频谱图中正一级提取出来,也就是所谓的设置通频窗口进行带通滤波处理。a(ff
x
,ffy)和c
*
(ff
x
+f
x
,ffy+fy)被滤除。c(ff
x-f
x
,ff
y-fy)向频谱原点移动f
x
和fy,消除载波之后变为c(ff
x
,ffy),对c(ff
x
,ffy)进行傅里叶逆变换将得到被测物的初始随机相位信息。
[0113]
由此初始相位φ0可由下式获取:
[0114]
φ0(x,y)=arctan{im[c0(x,y)]/re[c0(x,y)]}(2)
[0115]
式(2)中:
[0116]
c0(x,y)=ft-1
[c0(ff
x
,ffy)]
[0117]
其中ft-1
[
·
]为傅里叶逆变换运算,im[
·
]为取虚部运算,re[
·
]为取实部运算。
[0118]
同理可知,声波激励后的第n张干涉图的强度为in(x,y),按照上述步骤,可以获得时间tn状态下的随机相位分布φn(x,y),可表示为:
[0119]
φn(x,y)=arctan{im[cn(x,y)]/re[cn(x,y)]}(3)
[0120]
因此,时间tn状态下的相位差δφn(x,y)可表示为:
[0121]
δφn(x,y)=arctan{im[c0(x,y)
×cn*
(x,y)]/re[c0(x,y)
×cn*
(x,y)]}(4)
[0122]
由于arctan反正切运算,δφn(x,y)的范围在(-π,π)之间,而声波激励引起的离面形变一般超过二分之一个激光波长,因此δφn(x,y)呈现条纹分布图。
[0123]
实施例四
[0124]
如图5所示,本实施例基于已经获取的条纹诊断经验,具体如下:圈状条纹,特征是闭合和开放曲线,平滑方向变化,状态为连续曲线,可能的原因为内部脱落或空隙;弧凸条纹,特征是开放曲线,平滑方向变化,呈现连续曲线,可能的原因是内部裂纹或脱落;密变条纹,通常与其他图案一起出现,条纹密度出现变化,可能是内部挤压或压缩造成的;改向条纹,从一个方向到另一方向的突然方向变化,呈现连续的曲线分布,可能是材料或表面发生了变化。
[0125]
如图6所示,本实施例经过实地实验,对文物壁画进行了声波激励检测,进行了5个具体区域的检测:
[0126]
所述检测区域1,该检测区域表面无明显缺陷,通过声波激励散斑干涉检测,可以观察到该区域形变条纹非常均匀,说明该区域的层结构均匀。但是,由于变形条纹较为密集,所以初步可以判断该壁画区域可能存在与地杖底层大片脱粘的情况。
[0127]
所述检测区域2,该检测区域表面无明显缺陷,但通过声波激励散斑干涉检测,可
以观察到该区域的变形条纹存在明显的扭曲,说明壁画层与层间存在粘合不均匀的情况,且红框部分粘合比蓝框部分紧密(红框部分变形量小)。根据变形条纹状态,初步判断为层与层之间的脱粘引起的不严重空鼓。
[0128]
所述检测区域3,该检测区域为一上色较为复杂的区域,表面无明显裂纹,通过声波激励散斑干涉检测,可以观察到深浅色颜料层交界处(红框)存在条纹边缘扭曲现象
[0129]
所述检测区域4,通过对比壁画实物区域,可以观察到变形条纹从裂纹处(红色框)开始产生错位。除此之外,左侧条纹(蓝色框)数量比右侧多,说明在声波激励下,该裂纹区域左侧变形量比右边更大,即条纹数量多的区域比条纹数量少的区域变形量大,由此可推断出此区域左侧比右侧层起翘情况严重。
[0130]
所述检测区域5,该区域表面无明显缺陷,通过声波激励散斑干涉检测,可以观察到变形相位条纹非均匀(存在弯曲、且条纹宽度不等),说明该区域存在内部缺陷,结合肉眼表面观察,初步判定是一范围较大的空鼓区域。扫频激励结果中,低频-中频处理结果与高频处理结果条纹方向不一致,这是由于不同频率的声波对壁画层的激振情况不同,如果该区域空鼓范围较大,则不同频率的声波往复传导的方向可能存在不同,即表现出的条纹方向不同。
[0131]
上述实施例声波激励与散斑干涉检测系统及条纹诊断方法。所述集成化同步声波激励与激光全息散斑干涉检测系统主要包括激光器、光纤耦合器、光阑、分光棱镜、两个光纤夹持器、定制化封装壳体、声波信号发生器、声波信号放大器、三脚架移动平台、带ccd摄像机的图像处理接收系统、带labview上位机的计算机。所述测量及诊断方法包括声波与图像采集同步、图像保存、傅里叶图像处理和条纹降噪与诊断。本发明集成化程度高、结构紧凑,可实现墙体,壁画等物体的病害分析及诊断,检测目标为被测物表面的相位差。
[0132]
以上所述的具体实施例,对本发明的解决的技术问题、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1