石墨烯拉伸应变传感器及其制备方法与流程
1.本发明涉及传感器技术领域,特别是涉及一种石墨烯拉伸应变传感器及其制备方法。
背景技术:
2.应变传感器是基于测量物体受力变形所产生的应变的一种传感器,其能够将机械形变转化为可探测的电信号。其中,柔性应变传感器能够适应更为复杂的应用场景,在智能机器人、医疗监测、人机交互界面及仿生假肢等领域都展现出非常良好的应用前景,因而逐渐受到关注。
3.应变传感器中包括导电传感材料,石墨烯材料是一种典型的二维材料,在碳原子所处平面上其具有优秀的电子传输性能,并且石墨烯在宏观上也能够形成平面构型的电流传导通路,因而是一种较为理想的传感材料。然而石墨烯及其制备的薄膜等本身仅具有有限的拉伸性,因此往往还需要结合高弹性的聚合物基体以形成复合材料。“灌封法”是一种利用聚合物直接封装导电传感材料以制备柔性应变传感器的方式。例如,专利cn107655398a公开了一种高灵敏度可拉伸柔性应变传感器的制备方法,其中,石墨烯和镍膜由内至外依次包覆聚氨酯海绵形成的复合材料,再利用pdms直接封装以制备应变传感器,其拉伸应变范围可达到65%。然而,当柔性应变传感器的应变较大时,其稳定性和耐用性也往往较差,容易发生断裂,因此柔性应变传感器的应变范围往往较为有限。
技术实现要素:
4.有鉴于此,为了扩大柔性应变传感器的应变范围,有必要提供一种柔性应变传感器。
5.根据本公开的一些实施例,提供了一种石墨烯拉伸应变传感器,其包括石墨烯复合导电网格,所述石墨烯复合导电网格的网格线包括碳化材料和石墨烯材料,所述石墨烯材料通过所述碳化材料相连接,所述网格线上设置有多道平行且间隔排布的沟槽。
6.在本公开的一些实施例中,所述沟槽的延伸方向与所述石墨烯拉伸应变传感器的拉伸方向相交。
7.在本公开的一些实施例中,所述沟槽的宽度为20μm~100μm。
8.在本公开的一些实施例中,相邻的两个所述沟槽之间的间距为100μm~200μm。
9.在本公开的一些实施例中,所述石墨烯复合导电网格的网格线包括多条第一网格线和多条第二网格线,多条所述第一网格线均沿第一方向延伸,多条所述第二网格线均沿与所述第一方向相交的第二方向延伸,相邻的两条所述第一网格线之间具有第一间距,相邻的两条所述第二网格线之间具有第二间距,所述第一间距和所述第二间距均固定,且所述第一间距和所述第二间距相等。
10.在本公开的一些实施例中,所述石墨烯复合导电网格中的网格呈菱形,所述菱形由相邻的所述第一网格线和相邻的所述第二网格线围成,所述菱形具有第一对角线和第二
对角线,所述第一对角线沿所述石墨烯拉伸应变传感器的拉伸方向,所述第二对角线与所述第一对角线的长度之比为(1~9):1。
11.进一步地,本公开还提供了一种上述石墨烯拉伸应变传感器的制备方法,其包括如下步骤:提供前驱体网格,所述前驱体网格的网格线包括混合的可碳化材料和石墨烯材料;控制激光沿预设方向多次扫描所述前驱体网格,对应在所述前驱体网格的网格线上形成所述沟槽,并且通过所述激光使所述可碳化材料碳化,形成所述石墨烯复合导电网格。
12.在本公开的一些实施例中,提供所述前驱体网格的步骤包括:获取包括所述石墨烯材料和所述可碳化材料的浆料,所述可碳化材料能够发生交联;将所述浆料注入对应形状的模具中,使所述可碳化材料交联,形成所述前驱体网格,并将所述前驱体网格从所述模具中分离。
13.在本公开的一些实施例中,所述可碳化材料包括可溶性的海藻酸盐,所述海藻酸盐溶解于所述浆料中,使所述可碳化材料交联的步骤包括:向所述浆料中滴加含有钙离子的交联剂,以使所述海藻酸盐交联。
14.在本公开的一些实施例中,在所述浆料中,所述可碳化材料和所述石墨烯材料的质量之比为(0.5~2):1。
15.在本公开的一些实施例中,所述海藻酸盐在所述浆料中的质量浓度为0.75%~2%。
16.在本公开的一些实施例中,在使所述可碳化材料交联之后,还包括:对位于所述模具中的所述浆料进行冷冻干燥处理,以去除所述浆料中的溶剂。
17.在本公开的一些实施例中,所述激光的功率为15w~15.75w。
18.本公开提供的石墨烯拉伸应变传感器包括网格状的石墨烯复合导电网格,该石墨烯复合导电网格的网格线包括碳化材料和石墨烯材料,且该石墨烯复合导电网格的网格线上设置有多道平行且间隔排布的沟槽。其中,碳化材料可使石墨烯材料互相连接起来,保证网格线本身的导电性和机械稳定性。当该石墨烯拉伸应变传感器发生应变时,网格线随之产生应变,由于沟槽处的应力较低,因此沟槽处优先发生应变。通过在网格线上设置平行排布的沟槽,在应变过程中产生的微裂纹主要集中在沟槽处,因此该石墨烯复合导电网格的裂纹产生更为可控,从而有效提升该石墨烯复合导电网格的应变范围。
附图说明
19.图1为一种石墨烯拉伸应变传感器的结构示意图;图2为图1中a区域的放大示意图;图3为一种石墨烯拉伸应变传感器的制备方法;图4为激光处理前后的前驱体网格的形貌以及对应的原子比例;图5为实施例2中激光扫描前的前驱体网格的微观表面形貌、实施例4中激光横向扫描后的石墨烯复合导电网格的微观表面形貌以及实施例2中激光纵向扫描后的石墨烯复合导电网格的微观表面形貌;
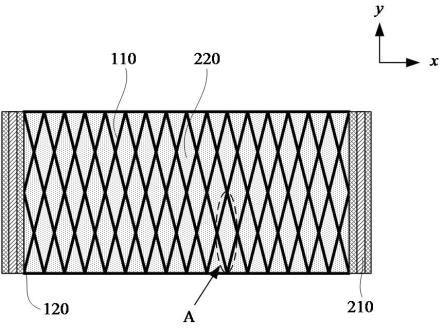
图6为实施例1~实施例3的石墨烯拉伸应变传感器的电流-电压曲线;图7为实施例4的石墨烯拉伸应变传感器的电流-电压曲线;图8为对比例2的石墨烯拉伸应变传感器的电流-电压曲线;图9为实施例1~实施例3的拉伸范围测试数据图;图10为实施例4的拉伸范围测试数据图;图11为对比例2的拉伸范围测试数据图;其中,各附图标记及其含义如下:110、石墨烯复合导电网格;120、电极连接层;210、外接电极;220、封装层。
具体实施方式
20.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳实施例。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。
21.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合,本文所使用的“多”包括两个或两个以上的项目。
22.在本发明中,如果没有相反的说明,组合物中各组分的份数之和可以为100重量份。如果没有特别指出,本发明的百分数(包括重量百分数)的基准都是组合物的总重量,另,本文中的“wt%”表示质量百分数,“at%”表示原子百分数。
23.在本文中,除非另有说明,各个反应步骤可以按照文中顺序进行,也可以不按文中顺序进行。例如,各个反应步骤之间可以包含其他步骤,而且反应步骤之间也可以适当调换顺序。这是技术人员根据常规知识和经验可以确定的。优选地,本文中的反应方法是顺序进行的。
24.本公开提供了一种石墨烯拉伸应变传感器,其包括石墨烯复合导电网格,所述石墨烯复合导电网格的网格线包括碳化材料和石墨烯材料,所述石墨烯材料通过所述碳化材料相连接,所述网格线上设置有多道平行且间隔排布的沟槽。
25.其中,该石墨烯复合导电网格中具有作为网格的通孔,相邻的通孔之间以网格线相间隔。网格线可以通过编织、拼接和模压等方式组合形成网格。网格线包括碳化材料和石墨烯材料。碳化材料指的是由可碳化材料经过例如煅烧等处理以去除其中的部分或全部杂原子后所形成的碳材料。单一的石墨烯片材之间通常仅具有范德华力,而通过可碳化材料与石墨烯材料复合,能够预先将石墨烯片材相互连接起来,以保证网格线本身的机械稳定性,再进行碳化以同时保证网格线的导电性。
26.其中,网格线上设置有多道平行且间隔排布的沟槽,多道平行且间隔排布的沟槽在石墨烯复合导电网格上构成沟槽状纹路。沟槽可以通过诸如刻蚀等方式形成。
27.传统技术在制备柔性应变传感器时,通常仅制备导电薄膜,导电薄膜在受到诸如拉伸等应力作用时产生裂纹以发生传感行为,但是裂纹在导电薄膜上的形成并不容易操作,重现性差。尤其是,当产生大而长的裂纹时,柔性应变传感器的感应范围很低。
28.本公开提供的石墨烯拉伸应变传感器包括网格状的石墨烯复合导电网格,该石墨烯复合导电网格的网格线包括碳化材料和石墨烯材料,且该石墨烯复合导电网格的网格线上设置有多道平行且间隔排布的沟槽。其中,碳化材料可使石墨烯材料互相连接起来,保证网格线本身的导电性和机械稳定性。当该石墨烯拉伸应变传感器发生应变时,网格线随之产生应变,由于沟槽处的应力较低,因此沟槽处优先发生应变。通过设置规律的沟槽,能够有效提升该石墨烯复合导电网格的应变范围。并且,在应变过程中产生的微裂纹主要集中在沟槽处,因此该石墨烯复合导电网格具有产生可控裂纹的优点,这能够有效提升传感器的耐用性和稳定性。
29.为了便于理解本公开提供的石墨烯拉伸应变传感器的结构,参照图1和图2所示,本公开还提供了一种石墨烯拉伸应变传感器的实施例。其中,图1示出了一种石墨烯拉伸应变传感器的结构示意图,图2示出了图1中a区域的放大示意图。
30.参照图1和图2所示,该石墨烯拉伸应变传感器包括石墨烯复合导电网格110,所述石墨烯复合导电网格110的网格线包括碳化材料和石墨烯材料,所述石墨烯材料通过所述碳化材料相连接,所述网格线上设置有多道平行且间隔排布的沟槽。其中,碳化材料和石墨烯材料相混合,且石墨烯材料之间通过碳化材料相互连接。
31.在该实施例的一些示例中,将碳化材料与石墨烯材料混合的方式包括:将能够交联的可碳化材料与石墨烯材料混合,并使可碳化材料发生交联,再对交联后的可碳化材料进行碳化处理。则碳化处理后所得的碳化材料能够将石墨烯材料之间连接起来。
32.在该实施例的一些示例中,沟槽的宽度为20μm~100μm。可选地,沟槽的宽度为20μm、40μm、50μm、70μm、80μm、100μm,或其中各宽度之间的范围。
33.在该实施例的一些示例中,相邻的两个沟槽之间的间距为100μm~200μm。可选地,相邻的两个沟槽之间的间距为100μm、120μm、140μm、160μm、180μm、200μm,或其中各间距之间的范围。
34.在该实施例的一些示例中,拉伸应变传感器具有固定的拉伸方向。为了便于表示,参照图1所示内容,以x轴表示拉伸方向。可以理解,在实际拉伸过程中,沿拉伸方向对该石墨烯拉伸应变传感器进行拉伸时,石墨烯复合导电网格110沿着拉伸方向伸长,垂直于拉伸方向的部分则出现少许缩短,网格线的应变主要发生在垂直于拉伸方向的方向。
35.可以理解,沟槽的延伸方向可以与x轴平行或相交。可选地,沟槽的延伸方向与拉伸方向相交。当沟槽受到沿拉伸方向的力时,该石墨烯复合导电网格110的应变主要集中在拉伸方向上,对应地,沟槽也会沿着拉伸方向产生微裂纹。此时,设置与拉伸方向相交的沟槽,更易于使得微裂纹沿着沟槽的延伸方向扩展,提高微裂纹的可控性,进而提高拉伸范围及其稳定性。
36.在该实施例的一些示例中,在该拉伸应变传感器中,沟槽的延伸方向与拉伸方向垂直。通过设置沟槽的延伸方向与拉伸方向垂直,能够使得拉伸应变传感器的拉伸范围尽可能高,并进一步提高其稳定性和耐用性。
37.参照图1所示,在该实施例的一些示例中,石墨烯复合导电网格110的网格线包括多条间隔设置的第一网格线和多条间隔设置的第二网格线,多条第一网格线均沿第一方向延伸,多条第二网格线均沿与第一方向相交的第二方向延伸。可以理解,此处的第一网格线沿第一方向延伸、以及第二网格线沿第二方向延伸,指的是在自然放松状态下的网格线的
延伸方向。当网格线发生应变时,其延伸方向可能随之改变。此时,相邻的两条第一网格线和相邻的两条第二网格线之间所限定的形状呈平行四边形。平行四边形具有不稳定性,其相邻的两条边之间的夹角容易改变,此时石墨烯复合导电网格110能够具有更大的拉伸范围。
38.参照图1所示,相邻的两条第一网格线之间具有第一间距,相邻的两条第二网格线之间具有第二间距,第一间距和第二间距均固定,且第一间距和第二间距相等。此时,相邻的两条第一网格线和相邻的两条第二网格线之间所限定的形状呈菱形。菱形的四条边长度相同,因此在拉伸过程中第一网格线和第二网格线受到的应变也相对均匀,能够进一步提高石墨烯复合导电网格110的拉伸范围。可以理解,在实际的石墨烯拉伸应变传感器中,还可以包括其他网格线。
39.参照图1所示,在该实施例的一些示例中,前驱体网格中的网格呈菱形,菱形的网格由相邻的两条第一网格线与相邻的两条第二网格线围成。菱形具有第一对角线和第二对角线,第一对角线沿前驱体网格的拉伸方向,可以理解,第二对角线和第一对角线垂直,则此时第二对角线垂直于拉伸方向。可选地,第二对角线与第一对角线的长度之比为(1~9):1。其中,第二对角线与第一对角线的长度相等或比第一对角线长,能够使得该石墨烯复合导电网格110在拉伸方向上具有更大的拉伸范围。
40.参照图1所示,该石墨烯拉伸应变传感器还可以包括封装层220,石墨烯复合导电网格110被封装层220所封装。封装层220的材料可以包括聚合物材料,例如封装层220可以包括硅橡胶。可选地,聚合物可以包括聚二甲基硅氧烷、硫化硅橡胶和脂肪族芳香族无硅共聚酯(ecoflex)中的一种或多种。封装层220的作用在于保护位于内部的石墨烯复合导电网格110,使得石墨烯复合导电网格110的应变更为均匀。
41.参照图1所示,该石墨烯拉伸应变传感器还可以包括外接电极210。外接电极210分别电连接于该石墨烯复合导电网格110的相对的两端。
42.参照图1所示,该石墨烯拉伸应变传感器还可以包括电极连接层120,电极连接层120连接于石墨烯复合导电网格110的相对的两侧边缘。该电极连接层120可以作为施力区域。
43.本公开还提供了一种上述实施例中的石墨烯拉伸应变传感器的制备方法,其包括如下步骤:提供前驱体网格,前驱体网格的网格线包括混合的可碳化材料和石墨烯材料;控制激光沿预设方向多次扫描前驱体网格,对应在前驱体网格的网格线上形成沟槽,并且通过激光使可碳化材料碳化,形成石墨烯复合导电网格110。
44.参照图3所示,其示出了本公开提供的一种石墨烯拉伸应变传感器的制备方法的实施方式,包括步骤s1~s5。
45.步骤s1,获取包括石墨烯材料和可碳化材料的浆料。
46.其中,可碳化材料能够发生交联,例如,可碳化材料是还未发生交联的材料,可碳化材料在经过离子交换处理之后,其中的分子链之间能够发生交联反应,进而使得可碳化材料形成交联网络结构。
47.在该实施例的一些示例中,可碳化材料包括可溶性的海藻酸盐,海藻酸盐溶解于浆料中。海藻酸盐是一种线型的聚阴离子共聚物。可选地,海藻酸盐为海藻酸钠。当可溶性的海藻酸盐遇到钙离子时,其中的金属阳离子会与钙离子交换,钙离子可与海藻酸盐中的
不同链段结合,使得海藻酸盐交联形成三维网络结构,此过程称为海藻酸盐的凝胶化。并且,海藻酸盐中的有机物链段也能够发生碳化形成碳化材料。因此,海藻酸盐是一种能够交联形成三维网络的可碳化材料。
48.与通常的能够交联的高分子材料不同的是,采用可溶性的海藻酸盐与石墨烯作为复合填料,海藻酸根离子带有负电,能够通过静电排斥作用,促进石墨烯在浆料中的分散。同时,海藻酸盐和石墨烯片材之间可以通过共价键的相互作用,使得石墨烯片材更为均匀地分布在海藻酸根离子之间,形成稳定的浆料体系。海藻酸盐经碳化后形成的碳化材料能够将石墨烯片材有效地连接在一起,使得形成的石墨烯复合导电网格具有较好的导电性。
49.在该实施例的一些示例中,在浆料中,可碳化材料和石墨烯材料的质量之比为(0.5~2):1。通过控制海藻酸盐与石墨烯材料的质量比,在交联的过程中,石墨烯片材还能够起到防止海藻酸盐密集交联的作用,降低复合材料的脆性。其中,当可碳化材料和石墨烯材料的质量比值小于0.5时,会存在浆料固化后无法充分脱模的问题。当可碳化材料和石墨烯材料的质量比值大于2时,会存在石墨烯导电网格电阻偏大的问题,导致传感信号输出不稳定。
50.在该实施例的一些示例中,海藻酸盐在浆料中的质量浓度为0.75%~2%。海藻酸盐具有黏性,控制海藻酸盐在浆料中的质量浓度,能够使得海藻酸盐和石墨烯之间分散地更为均匀、稳定。
51.在该实施例的一些示例中,获取包括石墨烯材料和可碳化材料的浆料的步骤包括:提供可碳化材料的分散液,提供石墨烯材料的分散液,以及,将可碳化材料的分散液与石墨烯材料的分散液混合,获得浆料。其中,可碳化材料的分散液以及石墨烯材料的分散液可以按照各自合适的组分以及浓度进行配制。例如,可选地,可碳化材料的分散液的质量浓度与石墨烯材料的分散液的质量浓度可以相同。将可碳化材料的分散液以及石墨烯材料的分散液混合的方式可以采用搅拌,搅拌时间可以控制在10min~30min。其中,可选地,浆料中的溶剂可以是水。
52.步骤s2,将浆料注入模具中,使可碳化材料发生交联。
53.其中,模具的形状与待形成的石墨烯复合导电网格的形状相对应。例如,石墨烯复合导电网格呈菱形网格状,则模具也对应具有菱形网格状凹槽。
54.在该实施例的一些示例中,可碳化材料包括可溶性的海藻酸盐,使可碳化材料交联的步骤包括:向浆料中滴加含有钙离子的交联剂,以使海藻酸盐交联并形成凝胶。
55.在该实施例的一些示例中,含有钙离子的交联剂可以是含有钙离子的水溶液。例如氯化钙溶液。氯化钙溶液的质量浓度可以是1%~5%,滴加体积可以是1.5ml~3ml。可选地,在滴加氯化钙溶液之后,等待5min~10min使海藻酸盐充分交联,形成凝胶。
56.在该实施例的一些示例中,在可碳化材料形成凝胶之后,还包括去除处于表面的多余的交联剂的步骤。可选地,先吸除位于凝胶表面的交联剂,再冲洗去除残留的交联剂。
57.其中,浆料在模具中交联之后形成前驱体网格,前驱体网格对应于石墨烯复合导电网格的网格图案。
58.在该实施例的一些示例中,模具中还具有与电极连接层相对应的边缘区域。
59.步骤s3,对前驱体网格进行冷冻干燥处理。
60.其中,尽管前驱体网格中的可碳化材料交联,使得浆料整体呈现水凝胶状,但是其
内部仍然包含有溶剂,对前驱体网格进行冷冻干燥处理的作用是去除浆料中的溶剂。
61.在该实施例的一些示例中,在冷冻干燥处理的步骤中,可以先将前驱体网格进行预冷冻处理,再转入冷冻干燥机中进行抽真空处理,使得其中的溶剂升华。可选地,预冷冻处理的温度可以是-80℃~-20℃,预冷冻时间为0.5h~24h。可选地,冷冻干燥处理的时间为2h~4h。
62.其中,冷冻干燥处理能够在保持前驱体网格整体形状基本不变的情况下,去除前驱体网格中的溶剂。
63.步骤s4,控制激光多次扫描前驱体网格,对应在前驱体网格的网格线上形成沟槽。
64.其中,沟槽可以通过激光烧蚀形成。对应于多道平行且间隔排布的沟槽,采用激光扫描时,也分别沿着多个平行且间隔的扫描路径进行扫描。
65.其中,在激光扫描的过程中,还使可碳化材料发生碳化。激光扫描会在被扫描区域产生局部瞬时高温,通过局部瞬时高温,可碳化材料迅速发生碳化,形成导电的碳化材料。并且,由于可碳化材料已经通过交联将石墨烯材料固定连接,因此碳化后的碳化材料仍然将其中的石墨烯材料连接在一起。
66.可以理解,在激光扫描的过程中,该前驱体网格中的网格线被激光烧蚀,因而沟槽也形成于网格线上。
67.在该实施例的一些示例中,在该实施例的一些示例中,激光的功率为15w~15.75w,例如,激光的功率可以是15w、15.1w、15.25w、15.5w、15.6w、15.7w、15.75w,或其中各功率之间的范围。通过控制激光的功率在较为合适的范围内,能够在使可碳化材料发生碳化并形成沟槽的同时,保持网格线的强度,提高该石墨烯拉伸应变传感器的拉伸范围。
68.在该实施例的一些示例中,控制沟槽的宽度在20μm~100μm之间。可选地,可以控制沟槽的宽度为20μm、40μm、50μm、70μm、80μm、100μm,或其中各宽度之间的范围。其中,沟槽的宽度可以通过激光光斑以及功率的大小进行控制。
69.在该实施例的一些示例中,控制相邻的两个沟槽之间的间距为100μm~200μm。可选地,可以控制相邻的两个沟槽之间的间距为100μm、120μm、140μm、160μm、180μm、200μm,或其中各间距之间的范围。其中,相邻的两个沟槽之间的间距可以通过控制激光扫描路径之间的间隔进行控制。
70.在该实施例的一些示例中,在控制激光扫描前驱体网格之前,还包括在该石墨烯复合导电网格的相对两端连接外接电极的步骤。其中,外接电极可以是金属丝,例如铜丝或银丝。将外界电极连接至石墨烯复合导电网格上的方式可以采用导电银胶或导电碳胶进行粘接。
71.步骤s5,采用聚合物封装石墨烯复合导电网格。
72.其中,采用聚合物封装石墨烯复合导电网格,以形成覆盖该石墨烯复合导电网格的封装层。在封装时,聚合物可以同时覆盖该石墨烯复合导电网格的相对两侧表面。
73.在该实施例的一些示例中,聚合物可以包括硅橡胶。可选地,聚合物可以包括聚二甲基硅氧烷、硫化硅橡胶和脂肪族芳香族无硅共聚酯(ecoflex)中的一种或多种。
74.在该实施例的一些示例中,将聚合物涂覆至该石墨烯复合导电网格上,并烘干固化。其中,控制烘干固化过程的温度为30℃~80℃,时间为0.5h~24h。
75.可以理解,通过步骤s1~s5,能够制备得到可供使用的石墨烯拉伸应变传感器。
76.为了更易于理解及实现本发明,以下还提供了如下较易实施的、更为具体详细的实施例及对比例作为参考。通过下述具体实施例和对比例的描述及性能结果,本发明的各实施例及其优点也将显而易见。
77.如无特殊说明,以下各实施例所用的原材料皆可从市场上常规购得。
78.实施例1配制质量浓度为2%的海藻酸钠溶液,配制质量浓度为2%的石墨烯分散液,称取10g海藻酸钠溶液和10g石墨烯分散液混合均匀,搅拌30min,制备得到浆料;取菱形网格结构模具,模具槽深为1mm,模具沿横向延伸,菱形具有横向对角线和纵向对角线,纵向对角线与横向对角线的长度比为4:1;将1ml浆料注入该模具中,再向浆料表面滴加2ml质量分数为2%的氯化钙溶液,静置5min使其固化形成凝胶,吸除凝胶表面的氯化钙溶液,用去离子水冲洗,将凝胶与模具分离,得到网格状的前驱体网格;将网格状的前驱体网格转入-80℃冰箱中预冷冻30min,转入冷冻干燥机中冷冻干燥2h,去除其中的溶剂;在前驱体网格的两端分别用导电银胶粘接铜丝作为外接电极,并设置激光功率为15w,沿着纵向对前驱体网格进行多次具有间隔的扫描,形成石墨烯复合导电网格;取2ml ecoflex滴涂于薄膜表面,待铺平后,转入60℃烘箱固化2h,得到具有菱形结构导电网格的石墨烯拉伸应变传感器。
79.实施例2配制质量浓度为2%的海藻酸钠溶液,配制质量浓度为2%的石墨烯分散液,称取10g海藻酸钠溶液和10g石墨烯分散液混合均匀,搅拌30min,制备得到浆料;取菱形网格结构模具,模具槽深为1mm,模具沿横向延伸,菱形具有横向对角线和纵向对角线,纵向对角线与横向对角线的长度比为4:1;将1ml浆料注入该模具中,再向浆料表面滴加2ml质量分数为2%的氯化钙溶液,静置5min使其固化形成凝胶,吸除凝胶表面的氯化钙溶液,用去离子水冲洗,将凝胶与模具分离,得到网格状的前驱体网格;将网格状的前驱体网格转入-80℃冰箱中预冷冻30min,转入冷冻干燥机中冷冻干燥2h,去除其中的溶剂;在前驱体网格的两端分别用导电银胶粘接铜丝作为外接电极,并设置激光功率为15.45w,沿着纵向对前驱体网格进行多次具有间隔的扫描,形成石墨烯复合导电网格;取2ml ecoflex滴涂于薄膜表面,待铺平后,转入60℃烘箱固化2h,得到具有菱形结构导电网格的石墨烯拉伸应变传感器。
80.实施例3配制质量浓度为2%的海藻酸钠溶液,配制质量浓度为2%的石墨烯分散液,称取10g海藻酸钠溶液和10g石墨烯分散液混合均匀,搅拌30min,制备得到浆料;取菱形网格结构模具,模具槽深为1mm,模具沿横向延伸,菱形具有横向对角线和纵向对角线,纵向对角线与横向对角线的长度比为4:1;将1ml浆料注入该模具中,再向浆料表面滴加2ml质量分数为2%的氯化钙溶液,静置5min使其固化形成凝胶,吸除凝胶表面的氯化钙溶液,用去离子水冲洗,将凝胶与模具分离,得到网格状的前驱体网格;将网格状的前驱体网格转入-80℃冰箱中预冷冻30min,转入冷冻干燥机中冷冻干燥2h,去除其中的溶剂;
在前驱体网格的两端分别用导电银胶粘接铜丝作为外接电极,并设置激光功率为15.75w,沿着纵向对前驱体网格进行多次具有间隔的扫描,形成石墨烯复合导电网格;取2ml ecoflex滴涂于薄膜表面,待铺平后,转入60℃烘箱固化2h,得到具有菱形结构导电网格的石墨烯拉伸应变传感器。
81.实施例4配制质量浓度为2%的海藻酸钠溶液,配制质量浓度为2%的石墨烯分散液,称取10g海藻酸钠溶液和10g石墨烯分散液混合均匀,搅拌30min,制备得到浆料;取菱形网格结构模具,模具槽深为1mm,模具沿横向延伸,菱形具有横向对角线和纵向对角线,纵向对角线与横向对角线的长度比为4:1;将1ml浆料注入该模具中,再向浆料表面滴加2ml质量分数为2%的氯化钙溶液,静置5min使其固化形成凝胶,吸除凝胶表面的氯化钙溶液,用去离子水冲洗,将凝胶与模具分离,得到网格状的前驱体网格;将网格状的前驱体网格转入-80℃冰箱中预冷冻30min,转入冷冻干燥机中冷冻干燥2h,去除其中的溶剂;在前驱体网格的两端分别用导电银胶粘接铜丝作为外接电极,并设置激光功率为15.45w,沿着横向对前驱体网格进行多次具有间隔的扫描,形成石墨烯复合导电网格;取2ml ecoflex滴涂于薄膜表面,待铺平后,转入60℃烘箱固化2h,得到具有菱形结构导电网格的石墨烯拉伸应变传感器。
82.对比例1配制质量浓度为2%的海藻酸钠溶液,配制质量浓度为2%的石墨烯分散液,称取10g海藻酸钠溶液和10g石墨烯分散液混合均匀,搅拌30min,制备得到浆料;取菱形网格结构模具,模具槽深为1mm,模具沿横向延伸,菱形具有横向对角线和纵向对角线,纵向对角线与横向对角线的长度比为4:1;将1ml浆料注入该模具中,再向浆料表面滴加2ml质量分数为2%的氯化钙溶液,静置5min使其固化形成凝胶,吸除凝胶表面的氯化钙溶液,用去离子水冲洗,将凝胶与模具分离,得到网格状的前驱体网格;将网格状的前驱体网格转入-80℃冰箱中预冷冻30min,转入冷冻干燥机中冷冻干燥2h,去除其中的溶剂;在前驱体网格的两端分别用导电银胶粘接铜丝作为外接电极,作为石墨烯复合导电网格;取2ml ecoflex滴涂于薄膜表面,待铺平后,转入60℃烘箱固化2h,得到具有菱形结构导电网格的石墨烯拉伸应变传感器。
83.对比例2配制质量浓度为2%的海藻酸钠溶液,配制质量浓度为2%的石墨烯分散液,称取10g海藻酸钠溶液和10g石墨烯分散液混合均匀,搅拌30min,制备得到浆料;取线型结构模具,模具槽深为1mm,模具中具有线型的凹槽;将1ml浆料注入该模具中,再向浆料表面滴加2ml质量分数为2%的氯化钙溶液,静置5min使其固化形成凝胶,吸除凝胶表面的氯化钙溶液,用去离子水冲洗,将凝胶与模具分离,得到线型状的前驱体;将线型状的前驱体转入-80℃冰箱中预冷冻30min,转入冷冻干燥机中冷冻干燥2h,去除其中的溶剂;在前驱体网格的两端分别用导电银胶粘接铜丝作为外接电极,并设置激光功率为
15.45w,沿着纵向对前驱体网格进行多次具有间隔的扫描,形成石墨烯复合导电线;取2ml ecoflex滴涂于薄膜表面,待铺平后,转入60℃烘箱固化2h,得到线型的石墨烯拉伸应变传感器。
84.对比例3配制质量浓度为2%的海藻酸钠溶液,配制质量浓度为2%的石墨烯分散液,称取10g海藻酸钠溶液和10g石墨烯分散液混合均匀,搅拌30min,制备得到浆料;取菱形网格结构模具,模具槽深为1mm,模具沿横向延伸,菱形具有横向对角线和纵向对角线,纵向对角线与横向对角线的长度比为4:1;将1ml浆料注入该模具中,再向浆料表面滴加2ml质量分数为2%的氯化钙溶液,静置5min使其固化形成凝胶,吸除凝胶表面的氯化钙溶液,用去离子水冲洗,将凝胶与模具分离,得到网格状的前驱体网格;将网格状的前驱体网格转入-80℃冰箱中预冷冻30min,转入冷冻干燥机中冷冻干燥2h,去除其中的溶剂;在前驱体网格的两端分别用导电银胶粘接铜丝作为外接电极,对前驱体网格进行400℃加热碳化处理2h,作为石墨烯复合导电网格;取2ml ecoflex滴涂于薄膜表面,待铺平后,转入60℃烘箱固化2h,得到具有菱形结构导电网格的石墨烯拉伸应变传感器。
85.试验1:观测激光处理前的前驱体网格的形貌并测试其元素比例,以及,观测激光处理后的前驱体网格的形貌并测试其元素比例,结果可见于图4。
86.试验2:测试实施例2中激光扫描前的前驱体网格的微观表面形貌,测试实施例4中激光横向扫描后的石墨烯复合导电网格的微观表面形貌,以及测试实施例2中激光纵向扫描后的石墨烯复合导电网格的微观表面形貌,结果可见于图5。
87.试验3:测试实施例1~实施例4及对比例1~对比例3制备的石墨烯拉伸应变传感器的电流-电压曲线,表征其电阻。其中,实施例1~实施例4及对比例2的电流-电压曲线分别见于图6~图8。
88.试验4:测试实施例1~实施例4及对比例1~对比例3制备的石墨烯拉伸应变传感器的拉伸范围。拉伸范围的测试方法为:对石墨烯拉伸应变传感器进行拉伸,并同时测试器电阻变化率,电阻变化率为拉伸过程中的电阻变化量与初始电阻的比值,拉伸至电阻变化率出现陡升时停止拉伸,认为此时为其最大拉伸范围。其中,实施例1~实施例4及对比例2的拉伸范围测试数据图可见于图9~图11,相应的拉伸范围的统计数值列于表1。
89.表1.实施例1~实施例4及对比例1~3的拉伸范围参照图4所示,前驱体网格具有仿形于菱形模具的菱形网格结构,网格中间被少许片材遮蔽,主要是在交联过程于表面产生的极少量碎片,在后续的激光处理过程中能够被直接去除。经过激光扫描后,石墨烯复合导电网格整体呈现出明显的黑色。并且,在激光处理之前氧原子的比例达到43.93%,而在激光处理之后氧原子的比例降低为25.72%,碳原子比例升高至58.91%,说明前驱体网格中的海藻酸盐经过激光处理已经发生明显碳化。
90.参照图5所示,其中,最左侧的图示出了实施例2中激光处理之前的前驱体网格中网格线表面呈现较为平坦且致密的薄膜状,位于中间的图示出了实施例4的激光横扫后的网格线表面呈现出周期性的横向沟槽,位于右侧的图示出了实施例2的激光纵扫后的网格线表面呈现出周期性的纵向沟槽。
91.参照图6~图8所示,实施例1~4以及对比例2的电阻虽然有所不同,但其电流-电压曲线均表现出了较好的线性趋势,说明制备的石墨烯拉伸应变传感器良好的导电性能。
92.参照表1及图9所示,实施例1~3之间的主要差异是激光功率有所不同,对应制备的石墨烯拉伸应变传感器的拉伸范围也有所不同,最高的实施例2的最高应变率达到了约140%。参照表1及图10所示,实施例4与实施例2之间的主要差异是激光扫描方向有所不同,实施例4的最高应变率仅有约100%,说明相较于横向扫描(即沟槽的延伸方向平行于拉伸方向),纵向扫描(即沟槽的延伸方向垂直于拉伸方向)制备的石墨烯拉伸应变传感器具有更大的拉伸范围。参照表1及图11所示,对比例2的最高应变率仅有约30%,说明定向的沟槽主要在网格状结构中发挥作用,对于线型结构的应变范围提升并不明显。
93.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
94.以上实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1