一种无人飞行器的自驱动角度传感器及其方法与流程
本发明涉及角度测量领域中的一种角度传感器、所述角度传感器的角度检测方法以及角度数据采集方法,特别是涉及一种无人飞行器的自驱动角度传感器、所述自驱动角度传感器的数据采集方法、所述自驱动角度传感器的旋转方向检测方法与旋转角度检测方法。
背景技术:
1、现有的飞行器,根据应用方向可以分为大型运输飞行器和小型飞行器,大型运输飞行器包括载人客机和运物货机,发展时间长,技术成熟,已经集成了角速率传感器、姿态传感器、高度传感器以及位置传感器等可以感知飞行器实时状态和周围环境的传感器。小型飞行器技术在近些年快速进步,主要应用方向是无人飞行器,目前已经发展出了扑翼、旋翼和固定翼等不同的形态,并装载了温度传感器、湿度传感器、气体传感器、气压计等环境传感器,并配备有红外热成像传感器以及高清可见光传感器等特制的传感器,广泛的应用在大气环境监测、农业监测、电力巡检和应急救援等领域中。
2、目前的小型无人飞行器集成了许多用于外部感知的传感器,但是对于飞行器本身的状态监测除了陀螺仪,超声波传感器,加速度计等用于感知飞行器位置、整体倾角和速度等基础信息的传感器之外,在载人飞机上搭载许久的迎角传感器和舵面角度传感器等飞行器状态传感器始终没有应用在小型无人飞行器上。由于在大型飞机上使用的传感器结构复杂,体积大,无自驱动等原因,很难集成到现有的小型飞行器上,特别由于小型飞行器体积小质量轻,直接集成的难度极大。在这样的环境下,寻找对小型无人飞行器可变构结构偏转角度进行监测的传感器十分困难。
技术实现思路
1、基于此,有必要针对现有小型无人飞行器的舵面转动缺少有效的监测舵面旋转角度的技术问题,本发明提供一种无人飞行器的自驱动角度传感器、所述自驱动角度传感器的数据采集方法、所述自驱动角度传感器的旋转方向检测方法与旋转角度检测方法。
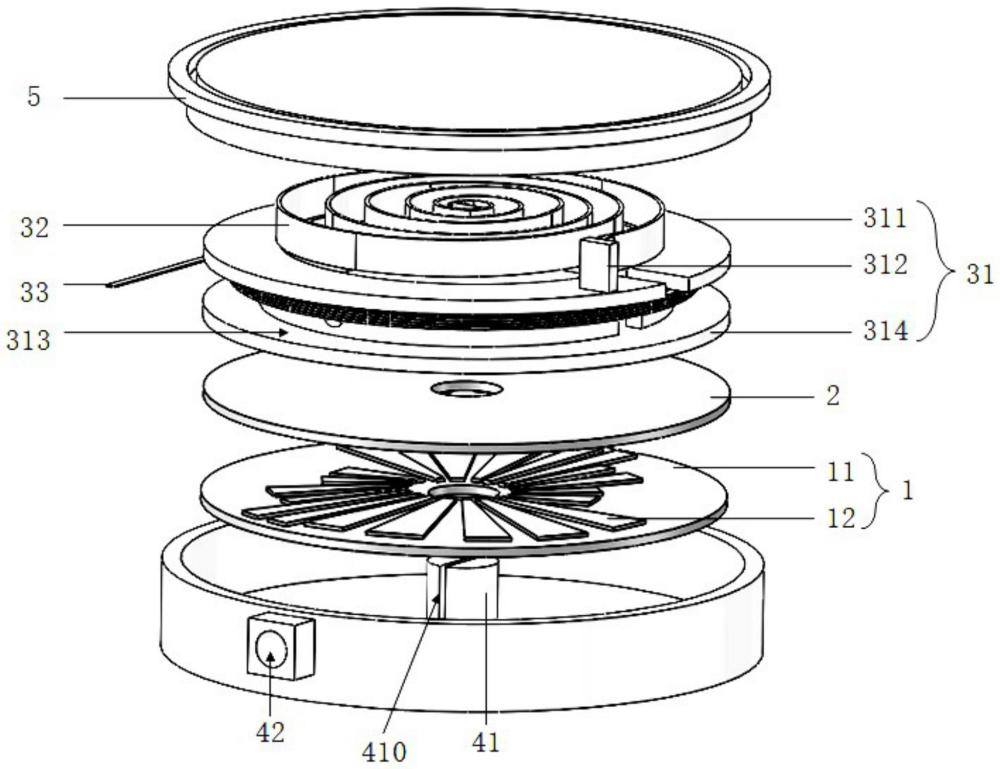
2、本发明采用以下技术方案实现:一种无人飞行器的自驱动角度传感器,其用于产生表征所述无人飞行器的舵面的转动方向和转动角度的两个电压,以供分别分析所述舵面的转动方向和转动角度;所述角度传感器包括:
3、中心设置有定位柱的底座。
4、定子模块包括:
5、呈绝缘的定子载体其固定在底座上,且定位柱穿透定子载体的中心。
6、均呈导电的多个定子电极均固定在定子载体远离底座的一侧上、且相互绝缘。多个定子电极以定子载体的中心为圆心呈发散状环形排列成圆环。
7、多个定子电极划分有方向信号区域一和转动信号区域二。方向信号区域包含至少一个方向电极单元。单个方向电极单元包含按照固定时针顺序长度依次递增的至少三组定子电极,且每组包含长度相等的两个定子电极;每组内的定子电极以固定的时针顺序进行不同标记。
8、方向电极单元按照上述固定时针顺序排列,且方向电极单元与方向电极单元之间间隔的角度为单个方向电极单元所在区域对应的圆心角度数的整数倍。
9、转动信号区域二的定子电极等分为两组,且两组定子电极按照固定时针顺序逐个交替排列。
10、具有相同标记的定子电极相互电性连接。
11、转子模块包括:
12、呈绝缘的转子载体其活动套设在定位柱上,并与定子载体上下两两相对且同轴设置。
13、呈导电的至少两个转子电极,其固定在转子载体面向定子载体的一侧上,且参照多个定子电极在定子载体上的排布方式排布在转子载体上,定子电极以及转子电极具有相同圆心角,且均分别等间距环形排列在定子载体和转子载体上;转子电极与转子电极之间的夹角为所述方向电极单元与方向电极单元之间间隔的角度的整数倍。
14、转动信号区域的定子电极交替电性连接成叉指电极。
15、其中,每个定子电极的表面或者每个转子电极的表面铺设一个介电纳米摩擦层,以能通过驱动转子电极摩擦方向信号区域一的定子电极而产生转动方向电压,同时转子电极摩擦转动信号区域二的定子电极而产生转动角度电压。
16、自驱动模块包括:
17、呈中空的旋转体,其一端同轴固定在转子载体远离定子载体的一侧上,并活动套设在定位柱上。
18、连接件一端固定并绕设在旋转体的外侧壁上,另一端固定在舵面上,通过舵面的旋转驱动连接件带动旋转体旋转。
19、复位件用于复位旋转体。
20、作为上述方案的进一步限定,所述自驱动角度传感器还包括:
21、数据处理模块根据方向信号区域一内的多个定子电极被摩擦发电的顺序为顺时针还是逆时针,由此判断舵面的旋转方向。其还根据单个转子电极与转动信号区域二内的定子电极的摩擦次数来判断舵面的旋转角度。
22、作为上述方案的进一步限定,定子模块还包括均呈导电的两对输出端,两对输出端均固定在定子载体上。
23、具有相同标记的定子电极电性连接同一个输出端。
24、具有相同标记的定子电极电性连接同一个输出端。
25、进一步地,所述自驱动角度传感器还包括:
26、数据处理模块还根据对应连接方向信号区域一内定子电极的输出端输出的电压波形的峰值变化趋势,判断舵面的旋转方向。还根据对应连接方向信号区域二内定子电极的输出端输出的电压波形的波峰和波谷的数量,由此判断舵面的旋转角度。
27、作为上述方案的进一步限定,复位件为弹性件,复位件设置在旋转体上,且一端固定在旋转体上,另一端固定在定位柱上。
28、其中,舵面通过驱动旋转体旋转的同时复位件产生形变力。通过释放复位件产生的形变力将旋转体复位。
29、进一步地,弹性件为涡卷弹簧。旋转体由固定块、上轴面以及下轴面组合而成。固定块固定在上轴面上,且上轴面和下轴面形成一个环形凹槽。
30、涡卷弹簧的一端连接固定块。
31、连接件一端固定连接且绕设在凹槽内。
32、进一步地,定位柱的端面开设有卡口,设置在旋转体上的涡卷弹簧的另一端通过卡持在卡口内而固定在定位柱上。
33、本发明还公开一种上述任意一种无人飞行器的自驱动角度传感器的数据采集方法,数据采集方法包括以下步骤:
34、将连接件固定在无人飞行器的舵面上。
35、舵面驱动连接件带动转轴旋转。
36、本发明还公开一种无人飞行器的舵面的旋转方向的检测方法,检测方法包括以下步骤:
37、提供根据上述任意一项的无人飞行器的自驱动角度传感器。
38、根据方向信号区域一内定子电极被摩擦发电的顺序为顺时针还是逆时针,由此判断舵面的旋转方向。
39、本发明还公开一种无人飞行器的舵面的旋转角度的检测方法,检测方法包括以下步骤:
40、提供根据上述任意一项的无人飞行器的自驱动角度传感器。
41、根据转动信号区域二对应输出端输出的电压波形的波峰和波谷的数量,判断转动信号区域二内定子电极被转子电极摩擦的次数,由此判断舵面的旋转角度。
42、与现有技术相比,本发明公开的技术方案具有如下有益效果:
43、1、现有技术无法有效采集小型无人飞行器的舵面偏转信号,本发明通过搭建自驱动角度传感器采集因无人飞行器的舵面旋转而产生的电压信号,通过电压信号表征舵面的旋转方向和旋转角度;
44、针对旋转方向,本发明通过定子模块上的方向信号区域的定子电极的特定排列以及转子模块上的转子电极特定呼应,可以使得经由纳米摩擦发电生成的电压大小有规律的递增或递减,从而通过电压大小的递增和递减分别去定义舵面的旋转方向;
45、针对旋转角度,本发明通过定子模块上的转动信号区域的定子电极的特定排列以及转子模块上的转子电极特定呼应,使得具有相同的圆心角的定子电极将360°的圆均分,从而只需要计算同一转子电极因摩擦产生纳米摩擦发电的定子电极的数量,由此判断所述舵面的旋转角度;
46、2、虽然可以通过电压信号表征舵面的旋转方向和旋转角度,但是还需要人工判断,因此为了可视化和智能化,还对电压信号做了智能处理,因而能全自动得到旋转方向和旋转角度,无需人工参与;故本发明通过对角度传感器采集到的电压信号进行分析可以自动判断无人飞行器的舵面的旋转方向和旋转角度角度;
47、3、本发明的应用可以通过对摩擦电信号的分析,便于给后续的辅助飞行器舵面校准、同步提供参考依据和数据支持,也便于后续对舵机和舵面的连接机构进行优化。
48、4、本发明的应用可以通过飞行状态时摩擦电信号的接收,对飞行器舵面进行实时监测和辅助舵机-连杆-舵面结构的故障判断提供了可靠性的依据,使得后续这些功能的实现都得以开展与实现。
49、5、本发明的应用可以使用传感系统的训练数据和相关分析,实现针对舵面角度过大等监测预警功能。
- 还没有人留言评论。精彩留言会获得点赞!