一种基于图像识别的智能机器人土壤采样方法
本发明涉及土壤采样方法领域,具体为一种基于图像识别的智能机器人土壤采样方法。
背景技术:
1、实验室监测法是土壤重金属污染监测中最为常见,也是最传统的一种监测方法。该方法是对土壤样品进行采集、收集,然后利用专业的实验室监测仪器和监测设备,该方案检测费用高、周期长、耗时耗力,无法实现土壤重金属的快速检测,难以满足突发场景的监测需求。而针对突发性环境污染事件及因环境问题而发生的纠纷,需要采取现场快速监测方法,以快速监测土壤中的重金属含量。但目前市面上尚无土壤环境自动监测机器人的报道,目前土壤监测方法主要为机械结构与机械运动方法,存在效率低、智能化低等问题。
2、因此目前土壤监测采样主要依靠人工操作,主要为机械结构与机械运动改进方法。如果直接应用于机器人采样,由于实际工作地面情况复杂,土壤与混凝土、沥青地面混杂,使用统一的机械操作会使检测设备存在损坏风险,很多情况下甚至无法进行机械操作;同时,不同地面所适用的监测模型也有所不同,需要根据地面模型不同调整模型参数。
技术实现思路
1、针对现有技术存在的不足,本发明目的是提供一种基于图像识别的智能机器人土壤采样方法,以解决上述背景技术中提出的问题,本发明提高采样精度的同时保护检测设备,提升土壤监测的自动化和信息化程度。
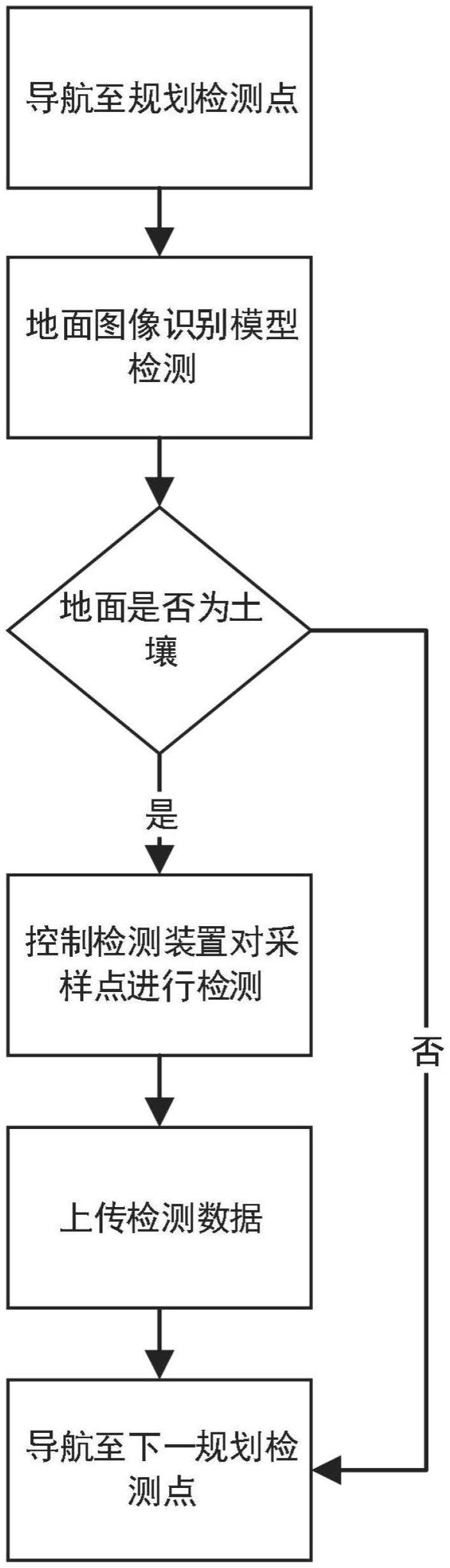
2、为了实现上述目的,本发明是通过如下的技术方案来实现:一种基于图像识别的智能机器人土壤采样方法,包括智能机器人运动控制模块与地面图像识别模块两部分,其采样过程为:步骤一、通过导航将智能机器人移动到规划的监测点位置上;步骤二、通过地面图像识别模块对底部的地面信息进行采集和检测;步骤三、对采集的底部地面图像进行判断,识别是否为土壤环境;步骤四、通过控制检测装置对采样点进行检测处理;步骤五、得到检测数据,并利用通讯模块将检测数据进行上传;步骤六、结束该位置的检测流程,并重复步骤一至步骤五的过程,直至对规划区域监测点位完成全部检测工作。
3、进一步的,所述地面图像识别模块基于神经网络实现对地面类型的识别,包含残差网络与通道注意力模块两部分。
4、进一步的,所述残差网络通过引入残差模块解决因网络层数过多导致的梯度消失与网络退化问题。
5、进一步的,所述通道注意力模块主要包含squeeze和excitation两个部分。
6、进一步的,所述squeeze操作将一个通道上整个空间特征编码为一个全局特征,采用全局平均池化来实现。
7、进一步的,所述excitation操作过程中,squeeze操作得到了全局描述特征,然后通过excitation操作获取通道之间的关系。
8、进一步的,所述excitation操作过程中,学习到各个通道之间的非线性关系,同时允许多个重视的通道同时存在,该场景下采用sigmoid形式的gating机制。
9、进一步的,所述智能机器人运动控制模块主要基于地面图像识别模型,识别地面类型作为运动决策依据,决定检测设备是否对采样点进行检测。
10、进一步的,所述步骤三中,当地面类型为土壤时,控制检测设备对采样点进行检测,当地面类型为非土壤时,则直接进行步骤六,控制机器人运动到下一检测点。
11、本发明的有益效果:
12、1.该基于图像识别的智能机器人土壤采样方法提出通过对地面材质进行分类,分为砂石地、沥青地、混凝土地、泥地、雪地、草地,并进一步细化不同的状态,如干燥、湿润、水覆盖等。引入专家领域知识,结合机器视觉方法提取地面特征,并通过地面特征进行识别,为智能机器人运动控制提供决策依据,控制机器人运动,选择合适的采样点进行土壤采样检测,智能化程度该,扩大了适用范围。
13、2.该基于图像识别的智能机器人土壤采样方法将计算机视觉与环境专家知识相结合,模拟环保工作人员行为,实现土壤重金属检测采样点自动识别,引导智能机器人在合适的采样点进行土壤采样,提高采样精度的同时保护检测设备,提升土壤监测的自动化和信息化程度。
技术特征:
1.一种基于图像识别的智能机器人土壤采样方法,其特征在于,包括智能机器人运动控制模块与地面图像识别模块两部分,其采样过程为:步骤一、通过导航将智能机器人移动到规划的监测点位置上;步骤二、通过地面图像识别模块对底部的地面信息进行采集和检测;步骤三、对采集的底部地面图像进行判断,识别是否为土壤环境;步骤四、通过控制检测装置对采样点进行检测处理;步骤五、得到检测数据,并利用通讯模块将检测数据进行上传;步骤六、结束该位置的检测流程,并重复步骤一至步骤五的过程,直至对规划区域监测点位完成全部检测工作。
2.根据权利要求1所述的一种基于图像识别的智能机器人土壤采样方法,其特征在于:所述地面图像识别模块基于神经网络实现对地面类型的识别,包含残差网络与通道注意力模块两部分。
3.根据权利要求2所述的一种基于图像识别的智能机器人土壤采样方法,其特征在于:所述残差网络通过引入残差模块解决因网络层数过多导致的梯度消失与网络退化问题。
4.根据权利要求2所述的一种基于图像识别的智能机器人土壤采样方法,其特征在于:所述通道注意力模块主要包含squeeze和excitation两个部分。
5.根据权利要求4所述的一种基于图像识别的智能机器人土壤采样方法,其特征在于:所述squeeze操作将一个通道上整个空间特征编码为一个全局特征,采用全局平均池化来实现。
6.根据权利要求4所述的一种基于图像识别的智能机器人土壤采样方法,其特征在于:所述excitation操作过程中,squeeze操作得到了全局描述特征,然后通过excitation操作获取通道之间的关系。
7.根据权利要求6所述的一种基于图像识别的智能机器人土壤采样方法,其特征在于:所述excitation操作过程中,学习到各个通道之间的非线性关系,同时允许多个重视的通道同时存在,该场景下采用sigmoid形式的gating机制。
8.根据权利要求1所述的一种基于图像识别的智能机器人土壤采样方法,其特征在于:所述智能机器人运动控制模块主要基于地面图像识别模型,识别地面类型作为运动决策依据,决定检测设备是否对采样点进行检测。
9.根据权利要求8所述的一种基于图像识别的智能机器人土壤采样方法,其特征在于:所述步骤三中,当地面类型为土壤时,控制检测设备对采样点进行检测,当地面类型为非土壤时,则直接进行步骤六,控制机器人运动到下一检测点。
技术总结
本发明提供一种基于图像识别的智能机器人土壤采样方法,其采样过程为:步骤一、通过导航将智能机器人移动到规划的监测点位置上;步骤二、对底部的地面信息进行采集;步骤三、判断是否为土壤环境;步骤四、进行检测处理;步骤五、得到检测数据,并进行上传;步骤六、结束该位置的检测流程,并重复步骤一至步骤五的过程,该基于图像识别的智能机器人土壤采样方法将计算机视觉与环境专家知识相结合,模拟环保工作人员行为,实现土壤重金属检测采样点自动识别,引导智能机器人在合适的采样点进行土壤采样,提高采样精度的同时保护检测设备,提升土壤监测的自动化和信息化程度。
技术研发人员:田扬戈,黄隆扬,吴科慧,孔宪明,田曜嘉
受保护的技术使用者:武汉大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!