一种建筑环境健康检测移动机器人的制作方法
本发明涉及机器人,尤其涉及一种建筑环境健康检测移动机器人。
背景技术:
1、随着人们生活水平和生活质量的提高,人们对居住、工作在其中的建筑的环境的品质要求越来越高。传统的建筑环境关注空气质量、光、声、热几大类环境指标,对这些指标的测量手段也不尽相同。但总的来看,依靠人在现场工作并依赖主观评价环境水准的方式仍为主流,这就造成如下局面:检测结果不精准,检测效率较低,人员成本较高。近年来,机器人、自主无人装备及其相关联的智能硬件技术发展迅速,越来越多的工作可通过无人自主智能机器人来完成,这样可提升工作效率、节省时间,更重要的是可以获取更加精准的现场数据,使生活和生产环境变得更加清洁、舒适、节能、安全。
2、目前,在检测机器人领域,传感器及其检测软件、环境感知算法与系统等关键技术仍是阻碍智能检测机器人整体性能提高的主要瓶颈,仍存在着大量无法解决的科学和技术难题,这也是智能检测机器走向大规模实用化阶段的最大阻力。影响感知性能的主要原因在于:现有算法大多只适用于良好可视环境,或只针对某种干扰进行改进,能够克服各种随机异源扰动的鲁棒、快速、统一视觉检测及识别算法与使用环境的耦合度不强,面向复杂不确定性环境的鲁棒视觉感知系统开发难度较大。
技术实现思路
1、本发明提供一种建筑环境健康检测移动机器人,用以克服现有技术中建筑环境健康的关键参数检测不及时的问题。
2、为实现上述目的,本发明提供一种建筑环境健康检测移动机器人,包括,
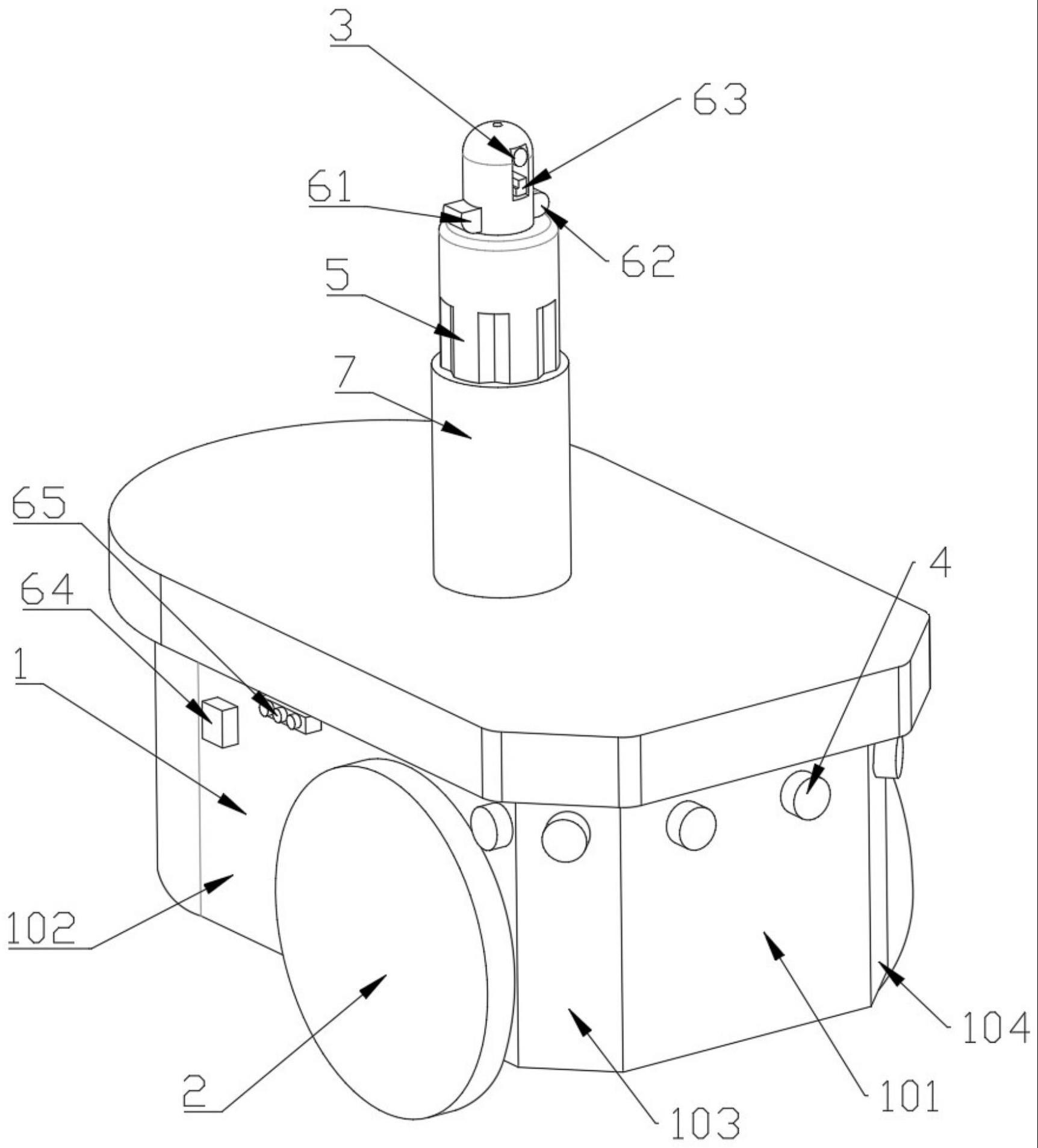
3、壳体,其包括前面、左侧面、右侧面、第一斜面、第二斜面;
4、电控模块,用于带动机器人移动;
5、轨迹规划模块,用于控制机器人沿设定程序沿轨迹移动;
6、视觉导航模块,用于在机器人移动过程中进行视觉导航;
7、激光测量模块,用于完成检测空间内存有物体的位移、厚度、振动、距离、直径相关几何量的测量;
8、环境检测模块,用于完成建筑环境健康检测,其由建筑室内空气质量智能检测组件、建筑声环境智能检测组件、建筑光环境智能检测组件、建筑热环境智能检测组件和建筑幕墙门窗智能检测组件五部分技术检测组件构成;
9、能源动力模块,用于为电控模块、轨迹规划模块、视觉导航模块、激光测量模块、环境检测模块提供能源。
10、进一步地,所述壳体的前面、左侧面、右侧面、第一斜面、第二斜面上分别设置有至少一个超声传感器,所述超声传感器用于辅助所述视觉导航模块进行视觉导航;
11、所述壳体顶部设置有传感器固定柱;
12、所述视觉导航模块包括位于所述传感器固定柱顶部的视觉传感器;
13、所述激光测量模块包括设置在所述传感器固定柱上的激光雷达;
14、所述建筑室内空气质量智能检测组件包括设置在所述左侧面上的空气质量检测传感器;
15、所述建筑声环境智能检测组件包括设置在所述左侧面上的建筑声环境检测传感器;
16、所述建筑光环境智能检测组件包括设置在所述传感器固定柱上的建筑光环境检测传感器;
17、所述建筑热环境智能检测组件包括设置在所述传感器固定柱上的建筑热环境检测传感器;
18、所述建筑幕墙门窗智能检测组件包括设置在所述传感器固定柱上的建筑幕墙门窗检测传感器。
19、进一步地,所述各模块之间通过标准化接口实现即插即用式连接。
20、进一步地,还包括,用于实现功能处理进行数据汇总的中控芯片。
21、进一步地,所述中控芯片进行轨迹规划时,内设有性能指标函数,
22、所述中控芯片定义非线性系统
23、
24、y=h(x),y∈rl
25、式中,
26、u为控制量;
27、r为状态向量;
28、m,l为状态向量维数
29、将运动轨迹优化问题转化为机器人动力学约束下的最小能耗求解问题,描述为:
30、
31、ax(t)<axmax
32、ay(t)<aymax
33、式中,
34、x为轨迹横坐标;
35、y为轨迹纵坐标;
36、t0为轨迹规划的起始时间;
37、tm为轨迹规划的终止时间;
38、e为总能耗;
39、g(x1(t),x2(t),...,xn(t),u(t),t)为单位时间能耗函数;
40、axmax为纵向最大加速度;
41、aymax为侧向最大加速度。
42、进一步地,移动机器人视觉跟踪算法采用融合建筑环境特征的mean shift算法。
43、进一步地,所述中控芯片中设置路径函数:y=f(x)
44、将路径函数用平坦输出表示为参数方程:
45、式中,
46、l为路径函数曲线;
47、z为平坦输出。
48、机器人的最优运行轨迹为:
49、
50、
51、式中,
52、x为系统状态;
53、u为输入。
54、进一步地,所述建筑室内空气质量智能检测组件能够采集建筑室内空气质量参数,所述建筑室内空气质量参数分为物理性参数、化学性参数、生物性参数和放射性参数。
55、进一步地,所述建筑热环境智能检测组件能完成建筑热环境检测,包括,建筑材料与构件的热工性能、建筑围护结构的传热和水分迁移过程、建筑室内的热舒适性以及建筑节能。
56、进一步地,所述建筑光环境智能检测组件能够完成建筑光环境检测,建筑光环境包括天然光和人工照明两方面。
57、与现有技术相比,本发明的有益效果在于:
58、(1)对影响建筑环境健康的关键参数实现移动式高实时高精度检测;
59、(2)实现集空气质量、光、声、热多类型建筑环境指标的综合检测与在线评估;
60、(3)对建筑环境实现无人化管理;
61、(4)降低建筑环境检测的人员成本、效率成本、设备成本。
技术特征:
1.一种建筑环境健康检测移动机器人,其特征在于,包括,
2.根据权利要求1所述的建筑环境健康检测移动机器人,其特征在于,
3.根据权利要求2所述的建筑环境健康检测移动机器人,其特征在于,所述各模块之间通过标准化接口实现即插即用式连接。
4.根据权利要求3所述的建筑环境健康检测移动机器人,其特征在于,还包括,用于实现功能处理进行数据汇总的中控芯片。
5.根据权利要求4所述的建筑环境健康检测移动机器人,其特征在于,所述中控芯片进行轨迹规划时,内设有性能指标函数,
6.根据权利要求5所述的建筑环境健康检测移动机器人,其特征在于,移动机器人视觉跟踪算法采用融合建筑环境特征的mean shift算法。
7.根据权利要求6所述的建筑环境健康检测移动机器人,其特征在于,所述中控芯片中设置路径函数:y=f(x)
8.根据权利要求7所述的建筑环境健康检测移动机器人,其特征在于,所述建筑室内空气质量智能检测组件能够采集建筑室内空气质量参数,所述建筑室内空气质量参数分为物理性参数、化学性参数、生物性参数和放射性参数。
9.根据权利要求8所述的建筑环境健康检测移动机器人,其特征在于,所述建筑热环境智能检测组件能完成建筑热环境检测,包括,建筑材料与构件的热工性能、建筑围护结构的传热和水分迁移过程、建筑室内的热舒适性以及建筑节能。
10.根据权利要求9所述的建筑环境健康检测移动机器人,其特征在于,所述建筑光环境智能检测组件能够完成建筑光环境检测,建筑光环境包括天然光和人工照明两方面。
技术总结
本发明涉及机器人技术领域,尤其涉及一种建筑环境健康检测移动机器人,包括,壳体、电控模块、轨迹规划模块、视觉导航模块、激光测量模块、环境检测模块、能源动力模块,环境检测模块用于完成建筑环境健康检测,其由建筑室内空气质量智能检测组件、建筑声环境智能检测组件、建筑光环境智能检测组件、建筑热环境智能检测组件和建筑幕墙门窗智能检测组件五部分技术检测组件构成。本发明能够对影响建筑环境健康的关键参数实现移动式高实时高精度检测;实现集空气质量、光、声、热多类型建筑环境指标的综合检测与在线评估;对建筑环境实现无人化管理;降低建筑环境检测的人员成本、效率成本、设备成本。
技术研发人员:杜明芳,米无极,郑文,张可文,梅阳,刘云佳,李多扬
受保护的技术使用者:杜明芳
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!