一种列车底盘高度检测方法与流程
本发明涉及列车底盘高度测量,具体涉及一种列车底盘高度检测方法。
背景技术:
1、列车采用空气悬架系统,列车底盘高度采用手动调节,故需测量列车各编组底盘高度是否符合车辆安全行驶要求。
2、目前列车的底盘高度仍沿用人工测量的方式进行检测,通过使用卷尺的方式进行高度测量。受人员技能熟练度影响该测量环节耗时长且测量结果的一致性较差,无法实现对列车的底盘高度进行精准测量。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的一种列车底盘高度检测方法解决了列车的底盘高度采用人工测量的方式进行检测存在耗时长且精度低的问题。
2、为了达到上述发明目的,本发明采用的技术方案为:一种列车底盘高度检测方法,包括以下步骤:
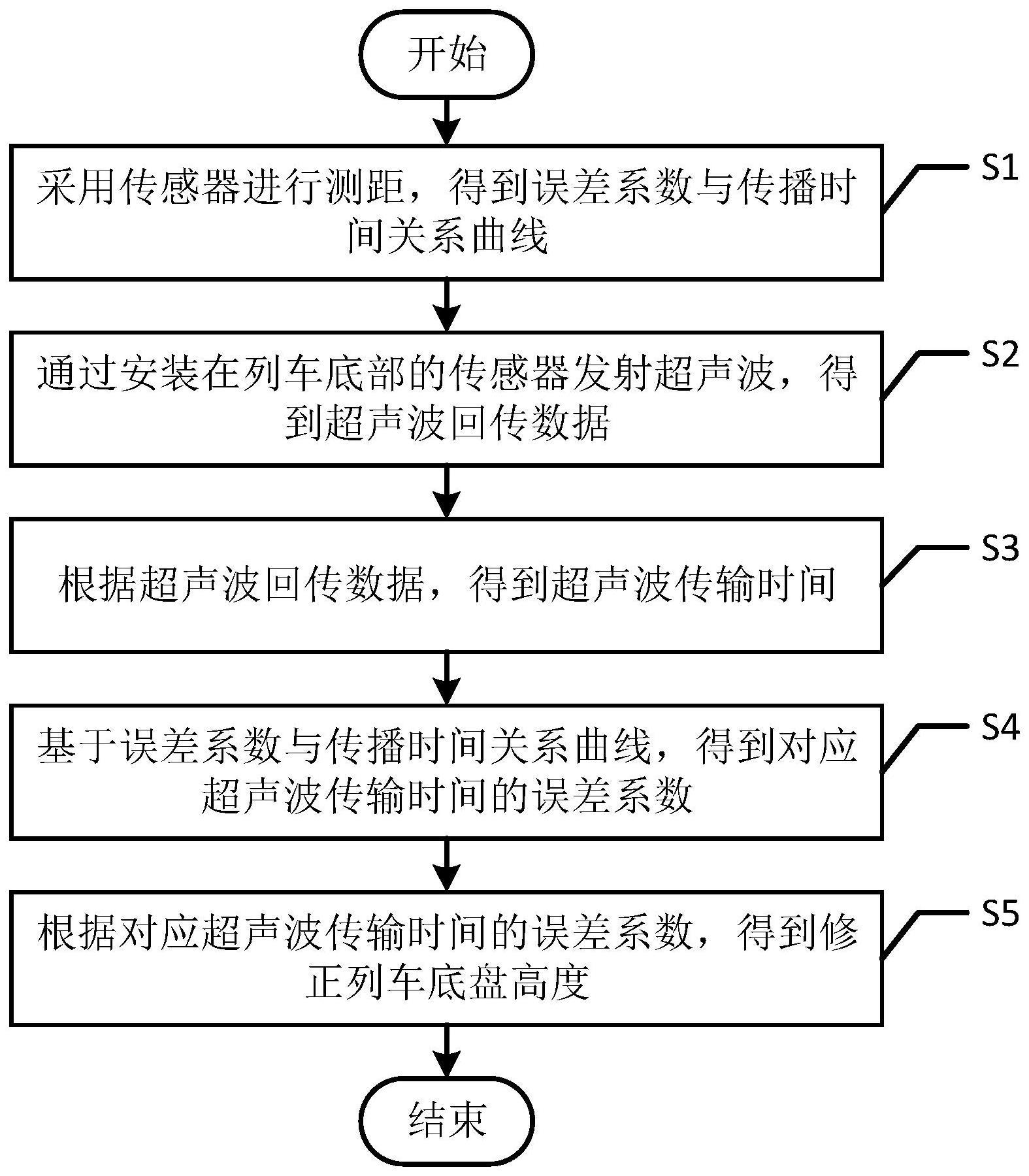
3、s1、采用传感器进行测距,得到误差系数与传播时间关系曲线;
4、s2、通过安装在列车底部的传感器发射超声波,得到超声波回传数据;
5、s3、根据超声波回传数据,得到超声波传输时间;
6、s4、根据超声波传输时间,基于误差系数与传播时间关系曲线,得到对应超声波传输时间的误差系数;
7、s5、根据对应超声波传输时间的误差系数,得到修正列车底盘高度。
8、进一步地,所述步骤s1包括以下步骤:
9、s11、设置距离传感器的多个不同距离的障碍物,(y1,...,yi,...,yi),其中,y1~yi为1~i个障碍物离传感器的实际距离;
10、s12、计算传感器发射超声波到达多个障碍物的时间,(t1,...,ti,...,ti),其中,t1~ti为传感器发射超声波到达1~i个障碍物的时间;
11、s13、根据超声波到达多个障碍物的时间,计算得到多个障碍物的预测距离,(y′1,...,y′i,...,y′i),其中,y′1~y′i为1~i个障碍物的预测距离;
12、s14、根据1~/个障碍物的预测距离y′1~y′i和障碍物离传感器的实际距离y1~yi,计算误差系数序列(δ1,...,δi,...,δi),其中,δ1~δi为1~i个误差系数;
13、s15、采用贝塞尔曲线对误差系数序列(δ1,...,δi,...,δi)和时间序列(t1,...,ti,...,ti)进行拟合,得到误差系数与传播时间关系曲线。
14、进一步地,所述步骤s13中障碍物的预测距离y′i的公式为:
15、y′i=vti
16、其中,y′i为第i个障碍物的预测距离,ti为超声波到达第i个障碍物的时间,v为超声波在空气中传播速度。
17、进一步地,所述步骤s14中误差系数δi的计算公式为:
18、
19、其中,δi为时间ti对应的误差系数,yi为第i个障碍物的实际距离,y′i为第i个障碍物的预测距离。
20、进一步地,所述步骤s15中误差系数与传播时间关系曲线的表达式为:
21、
22、其中,f为误差系数与传播时间关系曲线的表达式;为误差系数与传播时间关系曲线的第j个贝塞尔控制点的坐标;γ为贝塞尔函数阶数;θ为修正因子;为误差系数与传播时间关系曲线起点,该起点坐标表示传感器能检测到的最短距离对应的传播时间和对应的误差系数;为误差系数与传播时间关系曲线终点,该终点坐标表示传感器能检测到的最远距离对应的传播时间和对应的误差系数。
23、进一步地,所述步骤s2中传感器发射超声波的表达式为:
24、
25、其中,y为超声波信号,ω0为窗频率,ω1为超声频率,t为时间。
26、上述进一步地方案的有益效果为:将幅度信号sin(ω0t)叠加在载波cos(ω1t)上,便于超声波的发送,同时该幅度信号sin(ω0t)存在峰值,便于后续用于确定传输时间。
27、进一步地,所述步骤s3包括以下分步骤:
28、s31、在超声波回传数据的时间大于且频率满足超声频率ω1时,对超声波回传数据进行低通滤波,得到超声波幅度信号;
29、s32、对超声波幅度信号进行滤波处理,得到滤波超声波幅度信号;
30、s33、找到滤波超声波幅度信号的幅值最大时对应的接收时间;
31、s34、根据接收时间和发送时超声波信号幅值最大时对应的发送时间,得到超声波传输时间。
32、上述进一步地方案的有益效果为:在超声波回传数据的时间大于且频率满足超声频率ω1时,可以确定其为传感器发送的超声波对应的超声波回传数据,对超声波回传数据进行低通滤波,还原超声波幅度信号。在还原超声波幅度信号后,对超声波幅度信号进行滤波处理,滤除干扰信号,得到滤波超声波幅度信号。找到在滤波超声波幅度信号的幅值最大值处的接收时间,通过该接收时间减去发送时超声波信号幅值最大时对应的发送时间,将差值时间除2,得到超声波传输时间。
33、进一步地,所述步骤s32包括以下分步骤:
34、s321、构建长度为n的缓存序列,k初始值为1;
35、s322、从满足超声频率ω1时,按照时间先后顺序取超声波幅度信号的第k个数据;
36、s323、判断超声波幅度信号的第k+1个数据是否大于第k个数据,且两者差值小于增幅阈值,若是,则第k个数据为有用数据,k自加1,并跳转至步骤s322,直到达到超声波幅度信号的峰值数据,得到上升段的有用数据,若否,则k自加1,跳转至步骤s322;
37、s324、判断超声波幅度信号的第k+1个数据是否小于第k个数据,且两者差值小于减幅阈值,若是,则第k个数据为有用数据,k自加1,并跳转至步骤s324,直到超声波幅度信号中数据遍历完,得到下降段的有用数据,若否,则k自加1,跳转至步骤s324;
38、s325、将上升段的有用数据和下降段的有用数据组成有用数据序列,从有用数据序列中第一个数据开始,按照时间先后顺序,将有用数据填充至缓存序列,直到缓存序列第一次填充完;
39、s326、按时间先后顺序,每次对缓存序列填充一个有用数据,每填充一次,缓存序列中去除一个历史最久的有用数据;
40、s327、对每次填充完的缓存序列,计算一个滤波数据,直到所有有用数据处理完,得到滤波超声波幅度信号。
41、上述进一步地方案的有益效果为:由于发送超声波信号时,特殊的幅度信号sin(ω0t)波形,接收后,超声波回传数据的幅度信号依然会保持原本的形态,因此,在超声波幅度信号的峰值前,后一数据大于当前数据,在超声波幅度信号的峰值后,后一数据小于当前数据。在步骤s323的迭代过程若存在一个数据没有下一个数据比其更大,将其作为峰值,截止步骤s323的循环。再通过缓存序列去计算每个数据滤波后的滤波数据,通过滤波后的超声波幅度信号中的最大时,确定接收时间,保障接收时间的准确性。
42、进一步地,所述步骤s327中计算滤波数据的公式为:
43、
44、其中,χl为第l次滤波数据,n为缓存单元的长度,xn为缓存单元中第n个有效数据,χl-1为第l-1次滤波数据,χl-2为第l-2次滤波数据,χl-n为第l-n次滤波数据。
45、本发明的有益效果为:本发明通过传感器进行测距,得到误差系数与传播时间关系曲线,并将传感器安装在列车底部,通过超声波回传数据,得到超声波传输时间,再根据误差系数与传播时间关系曲线,得到对应超声波传输时间的误差系数,采用误差系数对预测距离进行修正,得到修正列车底盘高度,从而实现高精度的底部高度测量,避免了列车的底盘高度采用人工测量的方式进行检测存在耗时长且精度低的问题。
- 还没有人留言评论。精彩留言会获得点赞!