一种基于光流估计获取AGV位置的方法与流程
本发明涉及图像处理,具体涉及一种基于光流估计获取agv位置的方法。
背景技术:
1、自动导航车agv是一种自动化无人驾驶的智能化搬运设备,是现代工业自动化物流系统中的关键设备。agv的定位系统是实现自动导引的关键部分,也是目前的研究热点,定位是指agv通过感知自身和周围环境信息,经过一定的数据处理得到自身位姿的过程。目前agv定位主要分为两类:绝对定位和相对定位。
2、常用的绝对定位方式有全球定位系统(gps)、超声波定位系统、红外网络系统、射频识别系统等等。其中,gps不能用在室内,并且更新频率较低;超声波定位系统和红外网络系统具有低成本、小型化和易于连接的特点,然而这两种方法不能在长距离下使用,同时需要在场景中大面积布置,并且由于存在信号干扰而难以满足agv的定位要求;而射频识别系统需要额外的设备和较高的成本。这些绝对定位方法的优点在于它们不会积累定位误差,但整体定位误差较大。
3、相对定位主要为里程计算法,通过在agv工作的场所地面上贴二维码,然后在agv上安装一个二维码相机来定位地上的二维码从而确定agv的位置,当agv在二维码和二维码之间时,通过轮式里程计基于上一次二维码相机定位到的二维码位置来推算agv的位置。
4、通过轮式里程计推算agv在二维码和二维码之间的位置,需要精确的二维码相机和轮子之间的机械相对位姿关系,但是实际设备生产中总会出现安装误差导致二维码相机和轮子之间的位姿有误差,使得轮式里程计基于上一次二维码相机定位到的二维码位姿推算出来的agv位姿不准确,导致agv在二维码和二维码之间的定位不准确。
技术实现思路
1、为了克服现有技术的不足,本发明提供一种基于光流估计获取agv位置的方法,用于解决采用现有的相对定位方法对agv进行定位时,定位不准确的技术问题,从而达到提高agv定位精度的目的。
2、为解决上述问题,本发明所采用的技术方案如下:
3、一种基于光流估计获取agv位置的方法,其特征在于,包括以下步骤:
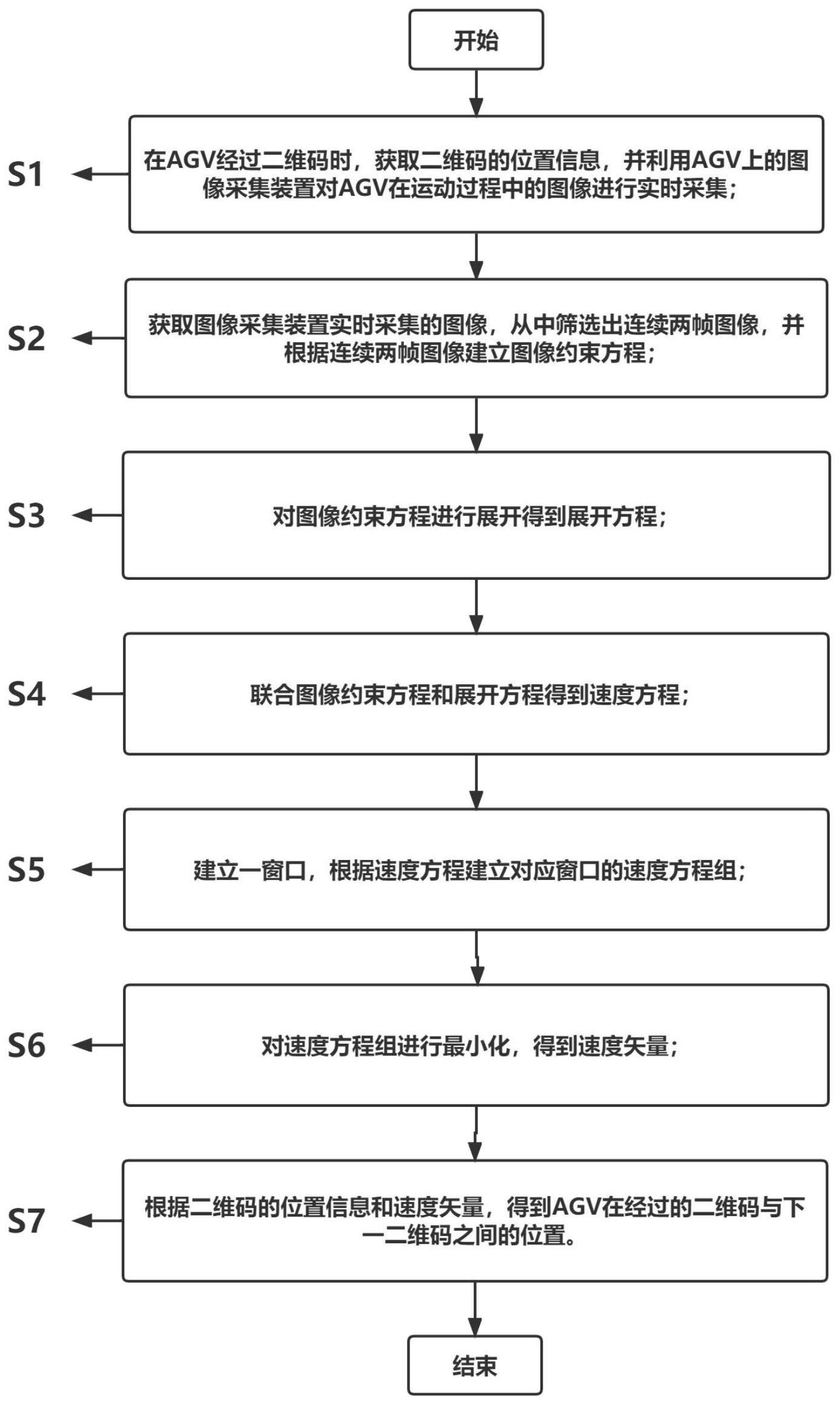
4、在agv经过二维码时,获取所述二维码的位置信息,并利用所述agv上的图像采集装置对所述agv在运动过程中的图像进行实时采集;
5、获取所述图像采集装置实时采集的图像,从中筛选出连续两帧图像,并根据所述连续两帧图像建立图像约束方程;
6、对所述图像约束方程进行展开得到展开方程;
7、联合所述图像约束方程和所述展开方程得到速度方程;
8、建立一窗口,根据所述速度方程建立对应所述窗口的速度方程组;
9、对所述速度方程组进行最小化,得到速度矢量;
10、根据所述二维码的位置信息和所述速度矢量,得到所述agv在经过的二维码与下一二维码之间的位置。
11、作为本发明优选的实施方式,在建立图像约束方程时,包括:
12、获取所述连续两帧图像上的特征点,利用近似最近邻搜索方法对所述特征点进行预匹配,再利用双向交叉匹配法提高匹配的精度,得到最终特征匹配点对。
13、作为本发明优选的实施方式,在利用近似最近邻搜索方法对所述特征点进行预匹配时,包括:
14、将所述连续两帧图像分别转换成第一灰度图和第二灰度图,并分别提取所述第一灰度图和所述第二灰度图的surf特征点;
15、利用所述近似最近邻搜索方法,获取所述第一灰度图任意特征点在所述第二灰度图上的距离最近的对应特征点,得到侯选特征匹配点对。
16、作为本发明优选的实施方式,在利用双向交叉匹配法提高匹配的精度时,包括:
17、执行候选匹配对获取步骤,包括:
18、遍历所述第一灰度图中的候选匹配特征点,针对所述第一灰度图中的候选匹配特征点a1,遍历所述第二灰度图中的各个候选匹配特征点,获取所述候选匹配特征点a1在所述第二灰度图中匹配的第一候选匹配特征点b1和第二候选匹配特征点b2;
19、所述第一候选匹配特征点b1、所述第二候选匹配特征点b2与所述候选匹配特征点a1之间的关系满足如下公式1:
20、
21、式中,d(a1,b1)是候选匹配特征点a1与第一候选匹配特征点b1的距离相似性度量值,d(a1,b2)是候选匹配特征点a1与第二候选匹配特征点b2的距离相似性度量值,yh为设定的阈值;
22、取所述候选匹配特征点a1和所述第一候选匹配特征点b1构成候选匹配对;
23、其中,所述第一候选匹配特征点为最近邻候选匹配特征点,所述第二候选匹配特征点b2为次近邻候选匹配特征点。
24、作为本发明优选的实施方式,在利用双向交叉匹配法提高匹配的精度时,还包括:
25、以所述第一灰度图中的候选匹配特征点作为遍历对象,按照所述候选匹配对获取步骤遍历所述第一灰度图中的每个候选匹配特征点,得到所述第一灰度图的所有候选匹配对,并根据所述第一灰度图的所有候选匹配对组成第一候选匹配对集合;
26、以所述第二灰度图中的候选匹配特征点作为遍历对象,按照所述候选匹配对获取步骤遍历所述第二灰度图中的每个候选匹配特征点,得到所述第二灰度图的所有候选匹配对,并根据所述第二灰度图的所有候选匹配对组成第二候选匹配对集合;
27、将所述第一候选匹配对集合和所述第二候选匹配对集合进行比较,筛选出其中完全相同的候选匹配对,作为最终的特征点匹配对集合;
28、其中,所述最终的特征点匹配对集合包含多个最终特征匹配点对。
29、作为本发明优选的实施方式,在建立图像约束方程时,还包括:
30、分别获取所述连续两帧图像的采集时间;
31、获取所述第一灰度图和所述第二灰度图中的最终特征匹配点对,根据所述最终特征匹配点对和所述采集时间建立所述图像约束方程,具体如公式2所示:
32、i(x,y,t)=i(x+δx,y+δy,t+δt)(2);
33、式中,x代表第一灰度图最终特征匹配点的x轴坐标,y代表第一灰度图最终特征匹配点的y轴坐标,x+δx代表第二灰度图最终特征匹配点的x轴坐标,y+δy代表第二灰度图最终特征匹配点的y轴坐标,δx代表x轴相对位移,δy代表y轴相对位移,t代表第一帧图像的采集时间,t+δt代表第二帧图像的采集时间,δt代表两帧时间差,i(x,y,t)代表t时刻第一灰度图最终特征匹配点的亮度,i(x+δx,y+δy,t+δt)代表t+δt时刻第二灰度图最终特征匹配点的亮度。
34、作为本发明优选的实施方式,在对所述图像约束方程进行展开得到展开方程时,包括:
35、根据所述第一灰度图最终特征匹配点的坐标(x,y)和所述第一帧图像的采集时间t,并利用泰勒公式对t+δt时刻第二灰度图最终特征匹配点的亮度函数进行展开,得到所述展开方程,具体如公式3所示:
36、
37、式中,代表第一灰度图最终特征匹配点的x轴坐标移动系数,代表第一灰度图最终特征匹配点的y轴坐标移动系数,代表第一灰度图最终特征匹配点的时间差系数,r(x,y,t)代表泰勒公式的高阶余项,近似为0。
38、作为本发明优选的实施方式,在联合所述图像约束方程和所述展开方程得到速度方程时,包括:
39、联合所述图像约束方程和所述展开方程得到导数方程,具体如公式4所示:
40、
41、式中,代表第一灰度图最终特征匹配点沿着x轴方向的导数,代表第一灰度图最终特征匹配点沿着y轴方向的导数;
42、将沿着x轴方向的速度分量记为u,将沿着y轴方向的速度分量记为v,对所述导数方程进行简化,获得所述速度方程,具体如公式5所示:
43、ixu+iyv+it=0(5);
44、式中,ix代表灰度值i对x轴的偏导数,iy代表灰度值i对y轴的偏导数,it代表灰度值i对t时刻的偏导数。
45、作为本发明优选的实施方式,在建立一窗口,根据所述速度方程建立对应所述窗口的速度方程组时,包括:
46、建立一个大小为m×m的窗口,根据所述速度方程,并利用在所述窗口内,图像的光流是一个恒定值,得到所述速度方程组,具体公式6所示:
47、
48、式中,n=m2。
49、作为本发明优选的实施方式,在对所述速度方程组进行最小化,得到速度矢量时,包括:
50、将所述速度方程组采用矩阵形式进行表示,具体如公式7、公式8和公式9所示:
51、
52、
53、
54、式中,a代表坐标点集,b代表时间差集;
55、将所述公式9记作采用最小二乘法得到转置矩阵方程,具体如公
56、式10所示:
57、
58、式中,at代表坐标点集转置矩阵,代表速度矢量;
59、根据所述转置矩阵方程得到所述速度矢量,具体如公式11所示:
60、
61、相比现有技术,本发明的有益效果在于:
62、本发明通过agv自带的图像采集装置识别地上纹路来推算agv的位置,不需要获取轮子和二维码相机之间的机械相对位姿关系,避免了agv在二维码和二维码之间的位置由于二维码相机和轮子安装误差导致推算坐标不准的问题。
63、下面结合附图和具体实施方式对本发明作进一步详细说明。
- 还没有人留言评论。精彩留言会获得点赞!