一种超欠挖检测装置及其方法与流程
1.本发明属于自动式隧道超挖欠挖检测领域,提供一种超欠挖检测装置及其方法。
背景技术:
2.超欠挖检测是隧道工程中必须检测的一个子项目,用于评估隧道爆破后的的超欠挖程度。即超欠挖检测能够对建设中的隧道在对于超欠挖的部位和超欠挖的程度进行检测,以便于及时获得超欠挖对于隧道安全性带来的危害。
3.随着国家基础设施建设的不断推进,大量的高速公路建设在全国各地展开。在山区修建高速公路,不可避免地要进行隧道的掘进。随之带来公路隧道在爆破施工中超欠挖现象非常普遍的工程问题。隧道超欠挖是指以隧道设计开挖轮廓线为基准,实际开挖的断面在基准线以外的部分称为超挖,而在基准线以内的部分称为欠挖。因此,提供一种可以全程进行超欠挖检测的装置是非常有必要的,可以极大可能的消除非必要的安全隐患。
4.目前在公路隧道常采用的超欠挖检测装置为全站仪、水淮仪、激光测距仪等监测仪器,检测方式通常是隧道爆破后,人工进入隧道布置监测点,通过全站仪、水淮仪、激光测距仪等传统仪器测量点位坐标。但在隧道复杂环境下,全站仪、水准仪所测数据太过庞大,采集每个断面的坐标,花费的时间较多,这样会导致观测精度降低;中国专利2021105048030公布的一种隧道超挖欠挖检测的装置和检测方法,采用的激光测距仪进行测量,激光测距仪又会出现无法测量到障碍物的情况,这是激光测距仪致命的缺点。与此同时施工人员不知道隧道开挖断面处的情况,测量数据会在隧道停留大量时间,隧道随时可能发生平顶、塌落,会有安全的隐患。
5.因此急需一种新的检测方法和检测装置来实时检测隧道,以免发生围岩坍塌,造成工程事故。
技术实现要素:
6.有鉴于此,本发明的目的在于提供提高实时检测数据精确度、节省人力物力和保障施工人员安全的一种超欠挖检测装置及其方法。
7.为达到上述目的,本发明提供了如下技术方案:
8.本发明提供一种超欠挖检测装置,包括可移动式小车,该可移动式小车又包括移动载体,设置在移动载体上的四套移动装置,设置在移动载体的内腔中的数据处理器和蓄电池,该数据处理器与蓄电池电性连接,设置在移动载体的顶部的移动扫描装置;其特征在于:所述移动载体的顶部设置有超声波测距仪和无线信号接收器,该超声波测距仪、无线信号接收器与所述移动扫描装置均与数据处理器电性连接,所述无线信号接收器与外部无线遥控器无线信号连接;
9.所述移动载体的内腔中设置有加速度传感器,该加速度传感器与数据处理器电性连接;
10.所述移动装置通过支撑架固定在移动载体的侧壁上,该支撑架通过陀螺仪转子轴
与移动装置连接,该陀螺仪转子轴上设置有角度测量仪,该角度测量仪与数据处理器电性连接。
11.上述方案中,进一步的:所述移动装置又包括滚轮,该滚轮安装在内置电机的输出轴上,该输出轴位于防护罩的底端,该防护罩的顶端与陀螺仪转子轴连接,所述内置电机通过导线与数据处理器电性连接。
12.上述方案中,进一步的:所述移动扫描装置上设置有照明装置,该照明装置与数据处理器电性连接。
13.本发明还提供一种超欠挖检测装置的检测方法,首先,施工人员将一种超欠挖检测装置的移动载体放在掌子面的中轴线上,通过外部无线遥控器给无线信号接收器发送信号,无线信号接收器将接收的信号反馈给数据处理器,数据处理器控制内置电机工作,内置电机带动滚轮转动,使得移动装置带动移动载体前进;
14.通过外部无线遥控器给无线信号接收器发送信号,照明装置与移动扫描装置启动工作,照明装置与移动扫描装置一体实时监控隧道情况,在移动载体前进途中,施工人员在外部无线遥控器上时刻关注陀螺仪转子轴上的角度测量仪反馈的角度偏差值和加速度传感器反馈的所述移动载体所处地理环境,根据角度偏差值和所述移动载体所处地理环境及时调整所述一种超欠挖检测装置的前进方向;所述所处地理环境是指移动载体处于平稳运行状态、爬山状态、下坡状态或摔倒状态;
15.待移动载体前进稳定,角度测量仪的偏差值归零后,确定为初始测量位置并开始测量,由超声波测距仪的声波发射仪向前方待测断面发射n个声波信号,超声波测距仪的声波接收仪接受声波信号,同一点传回来的声波以较弱声波为检测信号反馈值;
16.测量距离公式考虑温度对速度的影响其中所述r为气体的比热比,所述r为气体常数,所述t为热力学温度,所述η为气体摩尔质量,所述h为超声波接受仪与发射仪间距;
17.得到n个点的测量距离s和断面相对于装置的水平方位角度θ,加速度传感器可测得装置的倾斜角度θ’;超声波测距仪将所得测量距离和计算角度θ”反馈给数据处理器,其中θ”=θ
±
θ’,数据处理器可计算出断面上每个点相对于断面中心的距离;
18.给出点相对于断面中心距离的控制范围,判断所得数据精度是否符合范围要求,若不符合则记录位置并控制移动装置返回初始测量位置重新测量;若符合控制范围,数据处理器则将所测断面的n个数据转换并导入二维坐标系得到二维曲面图,将所得圆弧面与设计断面对比,以断面以内圆弧部分记为欠挖值,以断面以外圆弧部分记为超挖值;将所得二维曲面与设计断面的交点记为xi,将每段圆弧拟合为二维曲线fi(x),原设计断面曲线为f(x),故每段圆弧超欠挖区域计算面积为并通过数据统计分析,得出超欠挖值。
19.本发明的有益效果是:
20.1、本发明提及的超欠挖检测装置,通过无线遥控设计操控该装置,避免了施工人员进入隧道检测,保证了施工人员的安全性,同时花费时间较人工少,效率高。
21.2、本发明提及的超欠挖检测装置,通过在四个轮子间设置带有仪表的陀螺仪转子
轴,能严格移动装置的路线;通过加速度传感器分析出设备移动的方式及倾斜角度,增强了本检测装置测量的准确性。
22.3、本发明提及的超欠挖检测方法,通过数据处理器计算,能得到掌子面实际开挖情况,与设计掌子面进行对比,即可得到超欠挖方量。
23.4、本发明提及的超欠挖检测方法,通过以折射传回来的较弱声波为信号源进行计算,考虑了波遇到障碍物直接反射从而导致测量不准确的情况,增强了本检测装置测量的准确性。
24.本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
25.为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作优选的详细描述,其中:
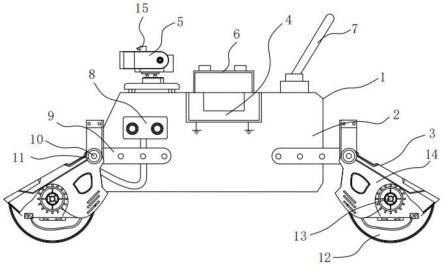
26.图1为本发明的结构示意图;
27.图2为结构侧视方向的结构示意图;
28.图3为本结构俯视方向的结构示意图;
29.图4为超欠挖检测装置工作图;
30.图5为隧道二维曲面简图;
31.图6为超声波在介质中传递的简图;
32.图7为隧道超欠挖区域数据获取方法的流程图;
33.附图标记:1、可移动小车;2、移动载体;3、移动装置;4、数据处理器;5、移动扫描装置;6、超声波测距仪;7、无线信号接收器;8、加速度传感器;9、支撑架;10、陀螺仪转子轴;11、角度测量仪;12、滚轮;13、输出轴;14、防护罩;15、照明装置。
具体实施方式
34.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
35.其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本专利的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。此外,本发明可以在不同例子中重复参考数字和/或字母。这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施例和/或设置之间的关系。
36.如图1-7所示,本发明的一种超欠挖检测装置,包括可移动式小车1,该可移动式小
车1又包括移动载体2,设置在移动载体2上的四套移动装置3,设置在移动载体2的内腔中的数据处理器4和蓄电池,该数据处理器4与蓄电池电性连接,设置在移动载体2的顶部的移动扫描装置5;其特征在于:所述移动载体2的顶部设置有超声波测距仪6和无线信号接收器7,该超声波测距仪6、无线信号接收器7与所述移动扫描装置5均与数据处理器4电性连接,所述无线信号接收器7与外部无线遥控器无线信号连接;
37.所述移动载体2的内腔中设置有加速度传感器8,该加速度传感器8与数据处理器4电性连接;
38.所述移动装置3通过支撑架9固定在移动载体2的侧壁上,该支撑架9通过陀螺仪转子轴10与移动装置3连接,该陀螺仪转子轴10上设置有角度测量仪11,该角度测量仪11与数据处理器4电性连接。在该实施例中,陀螺仪转子轴10上设置有角度测量仪11,能准确判断小车转向角度,方便手握外部无线遥控器的操作人员及时调整并控制移动装置3转向。加速度传感器8的设置,通过测量重力引起的加速度,可以计算出移动载体2相对于水平面的倾斜角度;数据处理器4通过分析动态加速度,可以分析出主体移动的方式、所处地理环境和行为方式,即角度测量仪11反馈的角度偏差值和加速度传感器8反馈的所述移动载体2所处地理环境反馈给外部无线遥控器的显示屏。所述超声波测距仪6在测距时,同一点传回来的声波以较弱声波为检测信号反馈值,提高了测量的精准性,且结构简单,测量速度快,可靠,能够适用于隧道超欠挖检测;同时采用无线遥控设计,安全性高,安装方便,实用性强。所述所处地理环境是指移动载体2处于平稳运行状态、爬山状态、下坡状态或摔倒状态。
39.上述实施例中,优选地:所述移动装置3又包括滚轮12,该滚轮12安装在内置电机的输出轴13上,该输出轴13位于防护罩14的底端,该防护罩14的顶端与陀螺仪转子轴10连接,所述内置电机通过导线与数据处理器4电性连接。
40.上述实施例中,优选地:所述移动扫描装置5上设置有照明装置15,该照明装置15与数据处理器4电性连接。
41.一种超欠挖检测装置的检测方法,首先,施工人员将一种超欠挖检测装置(即附图4和附图7中文字所示的装置)的移动载体放在掌子面的中轴线上,通过外部无线遥控器(即附图7中中文字所示的遥控装置)给无线信号接收器7发送信号,无线信号接收器7将接收的信号反馈给数据处理器4,数据处理器4控制内置电机工作,内置电机带动滚轮12转动,使得移动装置3带动移动载体2前进;
42.通过外部无线遥控器给无线信号接收器7发送信号,照明装置15与移动扫描装置5启动工作,照明装置15与移动扫描装置5一体实时监控隧道情况,在移动载体2前进途中,施工人员在外部无线遥控器上时刻关注陀螺仪转子轴10上的角度测量仪11反馈的角度偏差值和加速度传感器8反馈的所述移动载体2所处地理环境,根据角度偏差值和所述移动载体2所处地理环境及时调整所述一种超欠挖检测装置的前进方向;所述所处地理环境是指移动载体2处于平稳运行状态、爬山状态、下坡状态或摔倒状态;
43.待移动载体2前进稳定,角度测量仪11的偏差值归零后,确定为初始测量位置并开始测量,由超声波测距仪6的声波发射仪向前方待测断面发射n个声波信号,超声波测距仪6的声波接收仪接受声波信号,同一点传回来的声波以较弱声波为检测信号反馈值;
44.测量距离公式考虑温度对速度的影响其中所述r为气体的比热比,所述r为气体常数,所述t为热力学温度,所述η为气体摩尔质量,所述h为超声波接受仪与发射仪间距;
45.得到n个点的测量距离s和断面相对于装置的水平方位角度θ,加速度传感器可测得装置的倾斜角度θ’;超声波测距仪6将所得测量距离和计算角度θ”反馈给数据处理器4,其中θ”=θ
±
θ’,数据处理器4可计算出断面上每个点相对于断面中心的距离;
46.给出点相对于断面中心距离的控制范围,判断所得数据精度是否符合范围要求,若不符合则记录位置并控制移动装置3返回初始测量位置重新测量;若符合控制范围,数据处理器4则将所测断面的n个数据转换并导入二维坐标系得到二维曲面图,将所得圆弧面与设计断面对比,以断面以内圆弧部分记为欠挖值,以断面以外圆弧部分记为超挖值;将所得二维曲面与设计断面的交点记为xi,将每段圆弧拟合为二维曲线fi(x),原设计断面曲线为f(x),故每段圆弧超欠挖区域计算面积为并通过数据统计分析,得出超欠挖值。
47.上述实施例中,所述超声波测距仪6的声波发射仪和声波接收仪可分别简称为发射仪和接收仪,如附图4中文字所示。
48.上述实施例中所有部件均为市场销售产品,有关程序的描述是为了本领域技术人员理解本发明。
49.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1