一种基于神经网络的地波雷达与走航观测的数据校正方法
本发明涉及计算机,尤其是一种基于神经网络的地波雷达与走航观测的数据校正方法。
背景技术:
1、名词解释:
2、lstm神经网络:lstm是一种循环神经网络,可以弥补传统神经网络的缺陷,将序列先前的信息传递到当前任务中,保证信息的存在,达到更好的预报效果。该算法核心思想为细胞的状态,细胞状态贯穿整个链式结构但是很少有分支,以保证细胞中的信息保持不变流过整个链式结构。lstm通过一种“门”结构决定向细胞添加或删除信息。lstm通过忘记门、输入门、输出门三个门结构来控制细胞状态。
3、高频地波雷达:地波雷达是一种主要的对海探测手段。其探测原理是利用导电海洋表面绕射传播衰减小的特点,发射高频电波,可以突破地平线探测到300公里外的目标,且探测精度较高。
4、海流是海水中最重要的动力学参数之一,精确的观测海表流场对人类的生产生活具有重要意义。与现有的定点海流计观测、走航观测以及卫星遥感观测相比,高频地波雷达具有全天候、大范围高时空分辨率等优点。随着国内地波雷达技术的发展,对同一片海域的观测的雷达,逐渐从单站观测径向流,发展到双基站合成矢量流,再到多基站组网观测。但影响地波雷达数据质量的因素有很多,如地形、风、浪等环境因素以及观测点的距离,会影响单站回波数据质量,从而影响径向流的观测;目标点到不同雷达之间的夹角,不同雷达的频率和功率导致的时空分辨率不同,会导致径向流在合成矢量流时出现误差。现有的地波雷达组网技术,大多通过回波数据质量对同一点不同雷达的观测进行筛选,进而合成矢量流场。但传统的合成矢量流场的技术都是基于电磁学反射回波的诊断结果,反演算法没有通过现场海洋物理过程的约束,因此经常导致反演的海流结果与海上实测结果相差较大。因此,在传统地波雷达反演矢量流场算法中加入现场观测数据参数的约束,可以大幅提高地波雷达数据的反演精度。传统的海上观测技术中,定点海流计观测、海底锚定的adcp观测实施起来比较困难,且运行和维护价格高;而走航观测方式操作灵活,维护成本低,最适合用于对雷达反演算法的改进。
5、在地波雷达数据反演流场的这一问题上,现有技术主要存在以下问题:
6、现有的地波雷达反演流场方法仅基于电磁回波信号,该反演方法脱离基本的物理海洋学的理论约束,在电磁回波信噪比低或者环境干扰大的地方,反演结果误差大。
7、现有的地波雷达反演结果大多与定点adcp观测进行比对,而定点adcp观测运行和维护成本高,不利于长时间对地波雷达数据的校准。
技术实现思路
1、有鉴于此,本发明实施例提供一种准确性高的,基于神经网络的地波雷达与走航观测的数据校正方法。
2、本发明实施例的一方面提供了一种基于神经网络的地波雷达与走航观测的数据校正方法,包括:
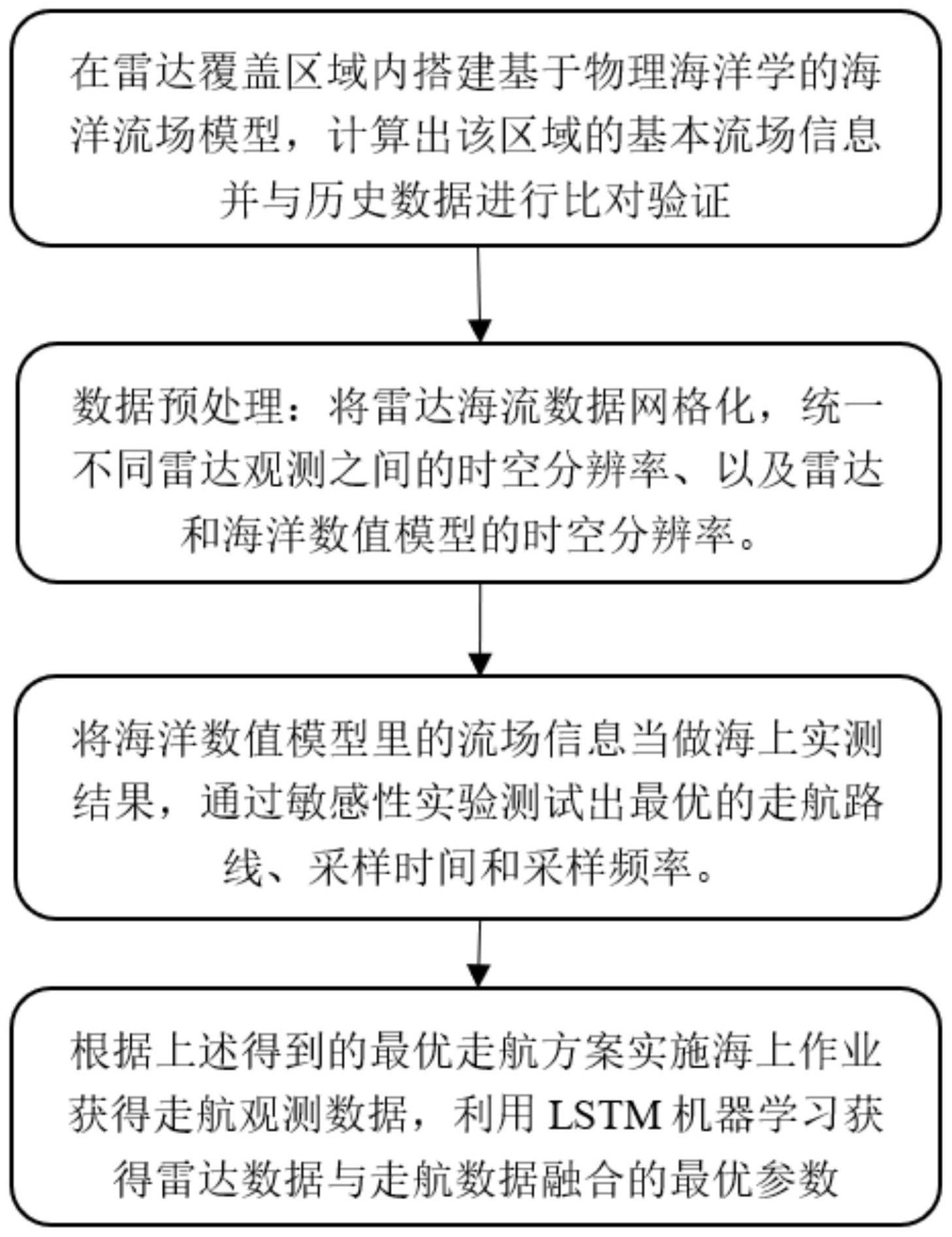
3、在雷达覆盖区域内搭建基于物理海洋学的海洋流场模型,通过所述海洋流场模型计算出雷达覆盖区域的四维流场信息;
4、对雷达获取的数据和所述四维流场信息进行数据预处理,得到目标数据;
5、根据所述目标数据,确定最优走航方案,所述最优走航方案包括最优走航路线、最优采样时间和最优采样频率;
6、根据所述最优走航方案获取走航观测数据;
7、将所述走航观测数据输入lstm神经网络,利用lstm神经网络的机器学习获得雷达数据与走航数据融合的最优参数,得到雷达组网模型;
8、其中,所述雷达组网模型用于获取最优雷达数据。
9、可选地,所述在雷达覆盖区域内搭建基于物理海洋学的海洋流场模型,通过所述海洋流场模型计算出雷达覆盖区域的四维流场信息,包括:
10、在雷达覆盖区域内搭建基于物理海洋学的fvcom模型;所述fvcom模型使用三角形网络;
11、通过所述fvcom模型计算所述雷达覆盖区域的四维流场信息;
12、将所述四维流场信息与历史数据进行比对,验证所述四维流场信息的可靠性。
13、可选地,所述对雷达获取的数据和所述四维流场信息进行数据预处理,得到目标数据,包括:
14、在时间上,对各个数据进行逐小时平均,将雷达获取的数据和所述四维流场数据统一成分辨率为1小时的数据;
15、在空间上,通过反距离加权算法将雷达获取的数据在空间上进行网格化处理,选取雷达覆盖有效区域内的数据,并将fvcom模型数据坐标设为与雷达数据最近网格点的坐标,统一雷达与模型数据的空间分辨率;
16、完成时间上和空间上的预处理后,得到所述目标数据。
17、可选地,所述将所述走航观测数据输入lstm神经网络,利用lstm神经网络的机器学习获得雷达数据与走航数据融合的最优参数,得到雷达组网模型,包括:
18、对所述走航观测数据进行标准化处理,得到合成流场数据,将所述合成流场数据输入lstm神经网络模型;
19、对所述lstm神经网络模型的参数进行初始化配置;其中,所述lstm神经网络模型的参数包括隐含层节点个数、隐含层的层数以及学习速率;
20、根据所述合成流场数据以及所述lstm神经网络模型的参数,获取lstm神经网络模型中隐藏层的神经元的输出结果;
21、根据所述隐藏层的神经元的输出结果,获取lstm神经网络模型的输出结果;
22、根据所述lstm神经网络模型的输出结果,通过目标函数计算输出结果与现场观测数据之间的误差,并根据所述误差进行优化训练,得到雷达组网模型。
23、可选地,所述标准化处理的表达式为:
24、
25、其中,xm代表参数标准化后的值;xoriginal代表参数原始值;xmin代表参数的最小值;xmax代表参数的最大值。
26、可选地,所述根据所述lstm神经网络模型的输出结果,通过目标函数计算输出结果与现场观测数据之间的误差,并根据所述误差进行优化训练,得到雷达组网模型,包括:
27、根据所述lstm神经网络模型的输出结果,通过目标函数计算输出结果与现场观测数据之间的误差;
28、根据所述误差,采用链式法则对各层权重值进行更新后计算输出值;
29、根据所述输出值进行迭代训练,直到满足训练次数或直到目标函数收敛,得到雷达组网模型。
30、本发明实施例的另一方面还提供了一种基于神经网络的地波雷达与走航观测的数据校正装置,包括:
31、第一模块,用于在雷达覆盖区域内搭建基于物理海洋学的海洋流场模型,通过所述海洋流场模型计算出雷达覆盖区域的四维流场信息;
32、第二模块,用于对雷达获取的数据和所述四维流场信息进行数据预处理,得到目标数据;
33、第三模块,用于根据所述目标数据,确定最优走航方案,所述最优走航方案包括最优走航路线、最优采样时间和最优采样频率;
34、第四模块,用于根据所述最优走航方案获取走航观测数据;
35、第五模块,用于将所述走航观测数据输入lstm神经网络,利用lstm神经网络的机器学习获得雷达数据与走航数据融合的最优参数,得到雷达组网模型;
36、其中,所述雷达组网模型用于获取最优雷达数据。
37、本发明实施例的另一方面还提供了一种电子设备,包括处理器以及存储器;
38、所述存储器用于存储程序;
39、所述处理器执行所述程序实现如前面所述的方法。
40、本发明实施例的另一方面还提供了一种计算机可读存储介质,所述存储介质存储有程序,所述程序被处理器执行实现如前面所述的方法。
41、本发明实施例还公开了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器可以从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行前面的方法。
42、本发明的实施例在雷达覆盖区域内搭建基于物理海洋学的海洋流场模型,通过所述海洋流场模型计算出雷达覆盖区域的四维流场信息;对雷达获取的数据和所述四维流场信息进行数据预处理,得到目标数据;根据所述目标数据,确定最优走航方案,所述最优走航方案包括最优走航路线、最优采样时间和最优采样频率;根据所述最优走航方案获取走航观测数据;将所述走航观测数据输入lstm神经网络,利用lstm神经网络的机器学习获得雷达数据与走航数据融合的最优参数,得到雷达组网模型。本发明基于走航数据和lstm来构建雷达组网模型,提高了数据的准确性,且有利于降低数据校正的维护成本。
- 还没有人留言评论。精彩留言会获得点赞!