调频连续波激光雷达及自动驾驶设备的制作方法
1.本技术涉及雷达技术领域,尤其涉及一种调频连续波激光雷达及自动驾驶设备。
背景技术:
2.激光雷达是广泛用于自动驾驶场景中的核心传感器之一,可以用于收集外部环境的三维信息。激光雷达按照探测原理,主要可以分成飞行时间(time of flight,tof)和调频连续波(frequency modulated continuous wave,fmcw)这两种激光雷达。fmcw激光雷达采用相干探测的方式,在接收模块通过本振光与目标物反射回的信号光相干拍频后解算得到探测结果,可以有效地减少外界环境光干扰,提升激光雷达测距性能。同时,fmcw激光雷达在提供了空间坐标信息以外,还可以额外提供测速信息。
3.fmcw激光雷达通常采用光环形器等大型光学器件进行分光,光路设计复杂、难以集成小型化;不采用分光装置直接接收,发射端和接收端间隔距离较远,导致激光雷达的接收效率低、探测盲区大。
技术实现要素:
4.本技术实施例提供调频连续波激光雷达及自动驾驶设备,能够解决调频连续波激光雷达光路设计复杂且扫描盲区较大的问题。
5.第一方面,本技术实施例提供了一种调频连续波激光雷达,包括:光源模块,用于发射调频连续波激光束;硅光芯片,包括分光模块、发射模块、耦合模块和接收模块,所述分光模块接收耦合进入所述硅光芯片的所述激光束,并分为探测光和本振光,所述探测光通过所述发射模块向外出射,所述本振光进入所述接收模块,所述耦合模块接收目标物反射的回波光并送至所述接收模块,所述接收模块用于接收所述本振光和所述回波光;及导光镜组,用于接收并准直所述发射模块输出的所述探测光,还用于接收并将所述回波光汇聚至所述耦合模块。
6.在一些示例性的实施例中,所述发射模块包括发射波导,所述耦合模块包括至少一个接收波导,所述发射波导和所述接收波导邻近所述导光镜组的主光轴设置。
7.在一些示例性的实施例中,所述发射波导朝向所述导光镜组的一端为第一发射端面,所述接收波导朝向所述导光镜组的一端为第一接收端面;所述第一发射端面和所述第一接收端面设置于所述导光镜组的焦平面上。
8.在一些示例性的实施例中,所述发射波导的发射模场尺寸与所述接收波导的接收模场尺寸相等或相差预设范围,所述发射波导和所述接收波导共用所述导光镜组。
9.在一些示例性的实施例中,所述调频连续波激光雷达还包括:第一放大模块,对应所述发射模块设置,所述第一放大模块用于接收所述发射模块发射的所述探测光,并将所述探测光放大形成第一放大光后射出;辅助镜组,对应所述第一放大模块设置,所述辅助镜组用于接收所述第一放大光
并改变所述第一放大光的光路方向,使所述第一放大光射向所述导光镜组的中心。
10.在一些示例性的实施例中,所述耦合模块包括m个接收波导,m为大于等于2的整数,所述耦合模块还包括:合束模块,所述合束模块包括至少一个的多端口耦合器,所述多端口耦合器具有n个第一接入端口和一个第一输出端口,n为大于等于2的整数,所述多端口耦合器的至少两个所述第一接入端口与所述接收波导一一连接,以使所述接收波导传输的所述回波光由所述第一接入端口进入所述多端口耦合器,并合束后经所述第一输出端口输出至所述接收模块。
11.在一些示例性的实施例中,所述合束模块还包括至少一个直通波导,所述直通波导具有一个第二接入端口和一个第二输出端口,所述第二接入端口与所述接收波导连接,所述第二输出端口与所述接收模块连接,以使所述接收波导传输的所述回波光经过所述直通波导传输至所述接收模块。
12.在一些示例性的实施例中,所述第一接入端口的数量和所述第二接入端口的数量之和与所述接收波导的数量相等。
13.在一些示例性的实施例中,所述发射波导和所述接收波导沿平行于所述硅光芯片表面的方向依次排列,靠近所述发射波导一侧的所述接收波导与至少一个所述多端口耦合器连接,远离所述发射波导一侧的所述接收波导与至少一个所述直通波导连接。
14.在一些示例性的实施例中,所述接收模块包括:偏振分束转换器,所述偏振分束转换器用于接收所述耦合模块传输的所述回波光并将所述回波光分为两束不同偏振态的偏振回波光;多个光混频器,每两个所述光混频器与同一个所述偏振分束转换器连接,各所述光混频器用于接收所述偏振分束转换器输出的所述偏振回波光,还用于接收所述本振光,并将接收到的所述偏振回波光与所述本振光混频得到混频光;第一平衡探测器,与所述光混频器连接,以接收所述混频光进行探测。
15.在一些示例性的实施例中,所述调频连续波激光雷达还包括:封装壳体,所述光源模块和所述硅光芯片均设于所述封装壳体的内部空间,所述封装壳体具有供所述探测光穿过的第一通道,还具有供所述回波光穿过的第二通道。
16.第二方面,本技术实施例提供一种自动驾驶设备,包括自动驾驶主体以及如上所述的调频连续波激光雷达,所述调频连续波激光雷达安装于所述自动驾驶主体。
17.基于本技术实施例的调频连续波激光雷达及自动驾驶设备,通过将发射模块和耦合模块集成在同一个硅光芯片上,使硅光芯片兼具发射光线和接收光线的功能,以便调频连续波激光雷达实现离轴收发功能。还能够使发射模块和耦合模块间距较小,提高发射模块的发射视场和耦合模块接收视场的重叠度,降低扫描盲区的覆盖面积,即使在调频连续波激光雷达安装于自动驾驶设备处于离地面较高的位置时,调频连续波激光雷达依然能够具有较低的扫描盲区。另外,将发射模块和耦合模块集成在同一个硅光芯片上,并通过设置导光镜组调整光线出入硅光芯片的方向,不再需要体积大、成本昂贵的大型光学器件,能够有效缩小整个调频连续波激光雷达的体积。
附图说明
18.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
19.图1为本技术一种实施例的调频连续波激光雷达的系统架构示意图;图2为本技术一种实施例的调频连续波激光雷达的结构示意图;图3为本技术一种实施例的发射模块的发射视角与接收模块的接收视角示意图;图4为本技术一种实施例的接收模块通过多端口耦合器与偏振分束转换器连接的结构示意图;图5为本技术一种实施例的部分波导阵列与多端口耦合器连接的结构示意图;图6为本技术一种实施例的接收模块通过星形耦合器与偏振分束转换器连接的结构示意图;图7为本技术一种实施例的接收模块通过多模干涉耦合器与偏振分束转换器连接的结构示意图;图8为本技术一种实施例的导光模块包括进光放大器的结构示意图。
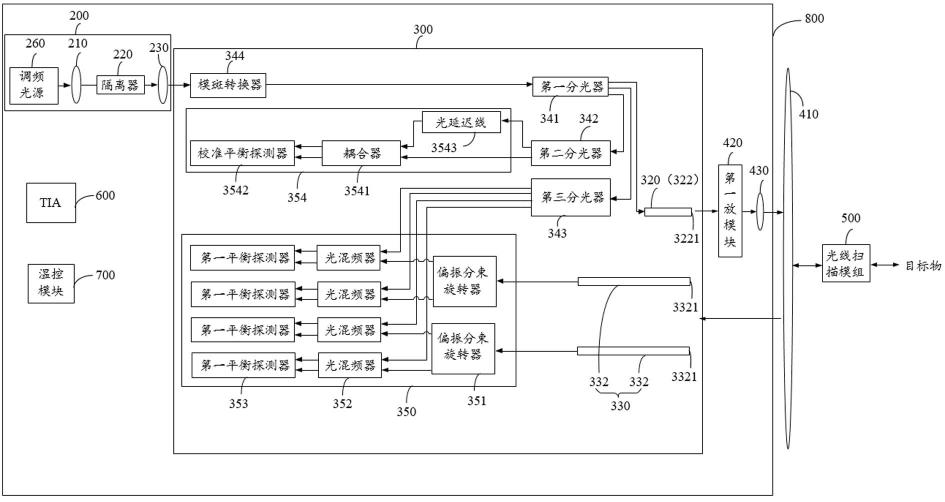
20.附图标记:10、调频连续波激光雷达;200、光源模块;210、准直透镜;220、隔离器;230、第一导光镜;240、进光放大器;250、第二导光镜;260、调频光源;300、硅光芯片;320、发射模块;321、发射视场;322、发射波导;3221、第一发射端面;330、耦合模块;331、接收视场;332、接收波导;3321、第一接收端面;30a、扫描盲区;340、分光模块;341、第一分光器;342、第二分光器;343、第三分光器;344、模斑转换器;350、接收模块;351、偏振分束转换器;352、光混频器;353、第一平衡探测器;354、光源非线性校准光路;3541、耦合器;3542、校准平衡探测器;3543、光延迟线;360、合束模块;361、多端口耦合器;3611、第一接入端口;3612、第一输出端口;362、直通波导;3621、第二接入端口;3622、第二输出端口;410、导光镜组;420、第一放大模块;430、辅助透镜;500、光线扫描模组;600、信号处理电路;700、温控模块;800、封装壳体。
具体实施方式
21.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
22.发明人发现,fmcw激光雷达由于需要相干探测,往往需要使用光纤接收目标物反
射回的光信号。采用多模光纤接收可以显著提升接收目标物反射回的信号光的效率,但是由于相干探测通常只工作在单模条件下,所以必须在相干探测之前将多个模式的光转成单模。在光纤中进行这样的模式转换十分困难,而且不容易控制,会导致高阶模式的泄露,引发很大的光损耗。在fmcw激光雷达采用多模光纤接收回波光信号时,采用波导阵列与多模光纤耦合,通过调节波导阵列的耦合端面的尺寸与光纤的端面匹配,能够有效降低光损耗。并且,采用波导阵列与光纤耦合,可以将波导阵列与fmcw激光雷达的其他光电器件集成在同一个芯片(比如硅光芯片)上面,实现更高的集成度。但是,在同轴接收的方案中,发射模块和耦合模块采用波导阵列,需要采用自由空间光环形器或者偏振分束晶体这样的大型光学器件,导致体积庞大,成本昂贵,难以量产;在离轴接收的方案中,虽然不再需要昂贵的大型光学器件与发射模块和耦合模块两者对应,但fmcw激光雷达安装于自动驾驶设备时通常距离地面很远,发射模块与耦合模块的盲区较大。
23.另外,由于受到walk-off效应的影响,与静止状态相比,当激光雷达动态扫描之后,回波光线会产生一定的位移。而且随着距离的增加,位移会进一步增加。因此想要覆盖这样大的位移,保证波导中的1根或者几根波导的模场能够接收到最大位移处的部分回波信号,那么要求每个波导单独的模场大小相加可以近似为最大位移。假如每个波导的单独模场较小,那么所需要的波导数目就会很多。导致波导后端的探测器数目显著增加,进一步导致后续硬件和信号处理资源显著增加。
24.为解决上述问题,本技术实施例提供一种调频连续波激光雷达及自动驾驶设备。如图1所示,为本技术一种实施例提供的调频连续波激光雷达10,调频连续波激光雷达10包括光源模块200、硅光芯片300和导光镜组410。
25.光源模块200用于发射激光束,硅光芯片300设于光源模块200的出光侧,导光镜组410对应硅光芯片300设置,光源模块200发射的激光束经硅光芯片300和收发模块后射出以投射至目标物。
26.如图2所示,光源模块200包括调频光源260、准直透镜210、隔离器220和第一导光镜230。调频光源260可为激光器,准直透镜210和第一导光镜230均设于调频光源260的出光侧,隔离器220设于准直透镜210和第一导光镜230之间,调频光源260发射的激光束依次经过准直透镜210、隔离器220和第一导光镜230。准直透镜210用于将激光束进行准直投射至隔离器220,隔离器220用于将准直后的激光束投射至第一导光镜230,并用于防止第一导光镜230一侧的光投射至隔离器220朝向准直透镜210的一侧,进而防止光干扰调频光源260的正常工作。第一导光镜230接收隔离器220传输的准直后的激光束,并将准直后的激光束聚焦投射至硅光芯片300。具体地,硅光芯片300包括分光模块340,分光模块340对应第一导光镜230设置以耦合第一导光镜230聚焦后的激光束。
27.硅光芯片300还包括与分光模块340连接的发射模块320,分光模块340接收耦合进入硅光芯片300的激光束,并将激光束分为探测光和本振光,发射模块320接收探测光并将探测光射出。硅光芯片300还包括耦合模块330和接收模块350,耦合模块330接收目标物反射的回波光并送至接收模块350,接收模块350用于接收本振光和回波光,以进行距离探测等。导光镜组410用于接收并准直发射模块320输出的探测光,还用于接收并将回波光汇聚至耦合模块330。
28.如图3所示,发射模块320具有发射视场321,处于发射视场321内的目标物能够被
来自发射模块320的光线扫描,目标物也能够将光线反射。耦合模块330具有接收视场331,处于接收视场331内的目标物反射的光线能够被耦合模块330的耦合端面接收。其中,发射视场321和接收视场331的重叠度越高,则发射模块320和耦合模块330的扫描盲区30a越小,由于发射模块320和耦合模块330之间存在间隔,因此,需设置发射模块320和耦合模块330之间的距离尽可能地小,以降低扫描盲区30a的覆盖面积。本技术实施例将发射模块320和耦合模块330集成在同一个硅光芯片300上,使硅光芯片300兼具发射光线和接收光线的功能,以便调频连续波激光雷达10实现离轴收发功能。还能够使发射模块320和耦合模块330间距较小,提高发射视场321和接收视场331的重叠度,降低扫描盲区30a的覆盖面积,即使在调频连续波激光雷达10安装于自动驾驶设备处于离地面较高的位置时,调频连续波激光雷达10依然能够具有较低的扫描盲区30a。另外,将发射模块320和耦合模块330集成在同一个硅光芯片300上,并通过设置导光镜组410调整光线出入硅光芯片300的方向,不再需要体积大、成本昂贵的大型光学器件进行分光,如光环形器、分光棱镜等,能够有效缩小整个调频连续波激光雷达10的体积。
29.发射模块320包括发射波导322,耦合模块330包括至少一个的接收波导332,发射波导322和接收波导332邻近导光镜组410的主光轴设置。发射波导322和至少一个的接收波导332形成波导阵列,使发射模块320和耦合模块330能够集成在硅光芯片300,还能够便于拉近发射模块320和耦合模块330之间的间距,以降低发射模块320和耦合模块330之间的扫描盲区30a。
30.其中,导光镜组410的直径为厘米级,相对导光镜组410,发射波导322和接收波导332的尺寸较小,例如,发射波导322和接收波导332的尺寸通常为几十微米到数百微米。可选地,设置发射波导322和接收波导332邻近导光镜组410的主光轴。例如,发射波导322和全部接收波导332均邻近导光镜组410的主光轴,以便导光镜组410调整光线传播方向,使导光镜组410能够将来自发射模块320的探测光进行准直,以及能够接收从目标物反射回的回波光并将回波光汇聚后投射至耦合模块330进行耦合。例如,发射波导322和全部接收波导332均沿硅光芯片300的表面依次平行铺设,发射波导322的端面和接收波导332的端面均与硅光芯片300的侧沿平齐,导光镜组410的主光轴可以设置于发射波导322和最靠近发射波导322的接收波导332之间,导光镜组410的主光轴也可以设置于波导阵列的最中间波导处或者最中间的两个波导之间。可选地,导光镜组410包括至少一个具有曲折力的镜片,具体可根据实际需求选择镜片数量以满足导光镜组410的光线汇聚和准直功能需求。
31.可选地,发射波导322和接收波导332均朝向导光镜组410设置。发射波导322朝向导光镜组410的一端为第一发射端面3221,接收波导332朝向导光镜组410的一端为第一接收端面3321,其中,第一发射端面3221和第一接收端面3321设置于导光镜组410的焦平面上,发射模块320的发射波导322和耦合模块330的接收波导332在第一方向上的间距很接近,虽然发射光路和接收光路是离轴设置,结合走离效应引起的接收光路相对于发射光路的偏移,发射视场和接收视场的几乎完全重叠,发射模块320和耦合模块330之间的扫描盲区30a很小,第一方向为发射波导322和接收波导332排列的方向。其中,探测光从发射波导322的第一发射端面3221射出到达导光镜组410,从目标物反射回的回波光经导光镜组410投射至第一发射端面3221以进入接收波导332。
32.当耦合模块330包括至少三个的接收波导332时,相邻两个接收波导332在第一方
向的间距可相等或不相等。另外,当形成耦合模块330的相邻两个波导阵列在第一方向的间距相等且为a时,发射模块320的发射波导322与耦合模块330的接收波导332在第一方向的间距为b,间距a与间距b可相等也可不等。形成耦合模块330的各接收波导332的第一接收端面3321的尺寸可相等也可不等。当形成耦合模块330的各接收波导332的第一接收端面3321的尺寸相等时,形成发射模块320的发射波导322的第一发射端面3221的尺寸与第一接收端面3321尺寸可相等也可不相等。本技术对相邻两个接收波导332、接收波导332与发射波导322在第一方向的间距不做限定,对第一发射端面3221和第一接收端面3321的尺寸也不做限定,具体可根据实际需求进行选择。
33.其中,发射波导322的第一发射端面3221的尺寸影响发射波导322的发射模场尺寸,接收波导332的第一接收端面3321的尺寸影响接收波导332的接收模场尺寸。可选地,发射波导322的发射模场尺寸与接收波导332的接收模场尺寸相等或相差预设范围,设置调频连续波激光雷达10包括一组导光镜组410,即发射模块320和耦合模块330共用同一组导光镜组410,波导阵列的多个波导的第一端面均处于导光镜组410的近主光轴处,无需采用大型光学器件进行分光,简化整个调频连续波激光雷达10的光路设计和结构。
34.可选地,设置调频连续波激光雷达10包括两组导光镜组410,其中一组导光镜组410对应发射模块320设置并用于对发射模块320射出的探测光进行准直,另一组导光镜组410对应耦合模块330设置并用于将回波光汇聚至耦合模块330。两组导光镜组410可间隔设置,且两组导光镜组410各自独立地包括至少一个的镜片,以便灵活调整各组导光镜组410的镜片数量,以及便于灵活调整两组导光镜组410的位置,以便规划安装空间。
35.调频连续波激光雷达10还包括光线扫描模组500,光线扫描模组500设于导光镜组410朝向目标物的一侧,光线扫描模组500用于接收导光镜组410传导的光线,并将该光线向外出射进行扫描。光线扫描模组500可以是振镜、转镜、mems微振镜等,也可以是上述几种方式的组合。可选地,光线扫描模组500包括一维振镜和一维转镜,一维振镜用于为调频连续波激光雷达10提供第二方向的扫描视场,一维转镜用于为调频连续波激光雷达10提供第一方向的扫描视场,其中,第一方向和第二方向垂直,例如,当调频连续波激光雷达10安装于自动驾驶设备时,第二方向为竖直方向,第一方向为水平方向。
36.如图2所示,接收模块350包括偏振分束转换器351,偏振分束转换器351与耦合模块330的接收波导332连接以接收耦合模块330传输的回波光,并将回波光转换为相同偏振态的多束偏振回波光。
37.可选地,耦合模块330包括m个接收波导332,m为大于等于2的整数。当耦合模块330包括m个接收波导332时,接收模块350包括与m个接收波导332数量相等且一一对应连接的m个偏振分束转换器351,各偏振分束转换器351接收对应的接收波导332传输的回波光并进行偏振转换形成多束偏振回波光。接收模块350还包括光混频器352,光混频器352的一个输入端连接于分光模块340以及接收本振光,光混频器352的另一个输入端还连接于偏振分束转换器351以接收一束偏振回波光,并将偏振回波光与本振光混频形成混频光。具体地,偏振分束转换器351的输入端与接收波导332连接,偏振分束转换器351可以包括两个输出端,例如将接收到的回波光分为p偏振回波光和s偏振回波光,此时与同一个偏振分束转换器351对应的光混频器352的数量可以为两个,且两个光混频器352与偏振分束转换器351的两个输出端一一对应连接,一个光混频器352为p偏振回波光与本振光混频,另一个光混频器
352为s偏振回波光与本振光混频。当然,偏振分束转换器351也可以采用其他方式将回波光进行偏振分集,并将偏振分集后的回波光分别输出后与本振光进行混频。
38.接收模块350还包括第一平衡探测器353,第一平衡探测器353连接于光混频器352以接收混频光进行平衡探测。具体地,光混频器352具有两个输出端,第一平衡探测器353与光混频器352的两个输出端连接以接收混频光进行处理,形成相应的相干电信号,之后该相干电信号可被输出至其他信号处理电路600中,用于进行进一步信号处理。例如,信号处理电路600可为跨阻放大电路(trans-impedance amplifier,tia)。
39.可选地,如图4所示,当耦合模块330包括m个接收波导332时,耦合模块330还包括合束模块360,合束模块360包括至少一个的多端口耦合器361。如图5-图7所示,多端口耦合器361具有n个第一接入端口3611和一个第一输出端口3612,n为大于等于2的整数。多端口耦合器361的第一输出端口3612与接收模块350连接,多端口耦合器361的至少两个第一接入端口3611与多个接收波导332一一对应连接,以使接收波导332传输的回波光由第一接入端口3611进入多端口耦合器361,并经多端口耦合器361合束后从第一输出端口3612输出至接收模块350,具体地,第一输出端口3612与接收模块350的偏振分束转换器351连接。如此,在耦合模块330包括m个接收波导332的情况下,多端口耦合器361将来自m个接收波导332的多路光信号耦合成一束光信号并输出给对应的偏振分束转换器351,只需接入一个偏振分束转换器351即可将多个接收波导332传输的多路信号光进行偏振转换,以便节省光混频器352和第一平衡探测器353的用量,简化整个硅光芯片300的系统架构。
40.当与同一个多端口耦合器361连接的接收波导332的数量较多时,多个接收波导332与多端口耦合器361进行光线传输容易存在光损耗。可选地,如图5所示,设置硅光芯片300包括多个多端口耦合器361,各多端口耦合器361各自独立地与多个接收波导332对应连接,以降低由一个多端口耦合器361与大量接收波导332连接时的光损耗。
41.其中,相对于较远距离,当调频连续波激光雷达10至目标物处于中近距离时,由于目标物本身反射回的回波光的光功率相对较强,回波光经接收波导332和多端口耦合器361进入接收模块350时能够满足探测需求,此时,可设置耦合模块330的多个接收波导332全部通过多端口耦合器361与偏振分束转换器351连接,以减少后续光混频器352和第一平衡探测器353等硬件的用量。
42.在调频连续波激光雷达10至目标物处于较远距离时,回波光到达接收波导332的光功率较小,且由于walk-off效应的存在,回波光还会产生一定的偏移,调频连续波激光雷达10至目标物的距离越远,偏移越大。可选地,如图5所示,设置合束模块360还包括至少一个的直通波导362,直通波导362具有一个第二接入端口3621和一个第二输出端口3622,第二接入端口3621与接收波导332连接,第二输出端口3622与接收模块350连接,使接收波导332通过直通波导362传输至接收模块350,经直通波导362传输的光信号损耗较小。具体地,各直通波导362的第二输出端口3622与一个偏振分束转换器351连接。例如,当接收模块350包括9个接收波导332时,沿远离发射波导322的方向,回波的能量越来越小,设置合束模块360包括两个多端口耦合器361和三个直通波导362,两个多端口耦合器361邻近发射波导322设置,且其中一个多端口耦合器361与接收近距离回波光的三个接收波导332连接,另一个多端口耦合器361与接收中距离的回波光的三个接收波导332连接,三个直通波导362则一一对应与接收远距离的回波光的三个接收波导332连接。
43.可选地,第一接入端口3611的数量和第二接入端口3621的数量之和与接收波导332的数量相等,设置其中一部分接收波导332与多端口耦合器361的第一接入端口3611一一对应连接,剩余部分接收波导332与直通波导362的第二接入端口3621连接,如此,以满足多通路传输需求。
44.可选地,硅光芯片300具有朝向导光镜组410的第一表面,可设置第一表面处于导光镜组410的焦平面,当发射波导322和接收波导332沿平行于第一表面的方向(即第一方向)依次排列时,靠近发射波导322一侧的接收波导332与至少一个多端口耦合器361连接,远离发射波导322一侧的接收波导332与至少一个直通波导362连接,防止回波光的边缘光线经多端口耦合器361传输至接收模块350光功率不足的情况发生。进一步地,当接收波导332的数量较多时,可设置合束模块360包括多个多端口耦合器361,且多个多端口耦合器361各自独立地与靠近发射波导322一侧的多个接收波导332连接。
45.多端口耦合器361可为星形耦合器、多模干涉耦合器等。如图6所示,为本技术一种实施例中耦合模块330的接收波导332通过星形耦合器与偏振分束转换器351连接的结构示意图,图6中,dd-bb之间为耦合模块330的多个接收波导332;cc-bb之间多个接收波导332之间的间距发生变化,例如,为适应多端口耦合器361的尺寸,在cc朝向bb的方向,相邻两个接收波导332之间的间距逐渐缩小,以实现多个接收波导332与多端口耦合器361的过渡转换,减小损耗;bb-aa之间为星形耦合器,星形耦合器用于将与其连接的波导阵列传输的多路光信号合并为一路光信号。如图7所示,为本技术一种实施例中耦合模块330的接收波导332通过多模干涉耦合器与偏振分束转换器351连接的结构示意图,与图6中不同的是,图7中bb-aa之间为多模干涉耦合器,多模干涉耦合器用于将与其连接的波导阵列传输的多路光信号合并为一路光信号。
46.分光模块340还用于将耦合进入硅光芯片300的激光束分出校准光,硅光芯片300还包括光源非线性校准光路354,光源非线性校准光路354与分光模块340连接并接收校准光,以对调频光源260发射的激光束进行校准。光源非线性校准光路354包括耦合器3541和校准平衡探测器3542,分光模块340分光出两束校准光,两束校准光的延迟不同,具体地,其中一束校准光进入耦合器3541,另一束校准光通过光延迟线3543进入耦合器3541,经过光延迟线3543的校准光能够被延迟,耦合器3541用于将两束延迟不同的束校准光进行混频,校准平衡探测器3542用于接收耦合器3541输出的混频光并进行平衡探测。耦合器3541为3db耦合器,当然,也可采用能够实现上述功能的其他耦合器3541。使用时,可将校准平衡探测器3542的输出信号进行进一步处理,以作为调频光源260校准的依据。采用本实施例提供的调频连续波激光雷达10,可实时对调频光源260进行校准,以便操作人员及时发现问题对其进行调整,进而保证检测结果的准确性。
47.可选地,如图2、图4和图8所示,分光模块340包括模斑转换器344、第一分光器341、第二分光器342和第三分光器343。模斑转换器344接收光源模块200发射的激光束,第一分光器341与模斑转换器344连接以接收光源模块200发射的激光束,第一分光器341还分别与发射模块320、第二分光器342和第三分光器343连接,且第一分光器341将光源模块200发射的激光束分光出探测光传输至发射模块320、分光出第一光线传输给第二分光器342、分光出第三光线传输给第三分光器343,第二分光器342与光源非线性校准光路354连接并将第一光线分光出两束校准光传输至光源非线性校准光路354,第三分光器343与多个光混频器
352连接并将第三光线分光出多束本振光,且将多束本振光一一对应地传输至多个光混频器352。当然,本技术实施例的分光模块340的设置方式包括但不限于如上所述的设置方式,具体可根据实际需求进行选择。
48.可选地,模斑转换器344包括第一波导,第一波导为锥形波导、悬臂梁波导或多层波导。第一波导和发射波导322可采用相同材质的材料制得,此时,第一波导和发射波导322能够传输的光功率相等,并可设置第一波导和发射波导322处于同层,第一波导和发射波导322直接通过第一分光器341导通以传输光线,便于简化硅光芯片300结构。其中,发射波导322的材质可与接收波导332的材质相同,便于简化制备发射波导322和接收波导332的工艺。
49.可选地,当第一波导能够容纳的光功率与接收波导332能够容纳的光功率相等时,说明硅光芯片300能够传输的探测光的功率有限,由发射波导322发射的探测光能量有限,难以满足远距离测距的发射能量需求,如图2和图4所示,调频连续波激光雷达10还包括第一放大模块420和辅助透镜430,第一放大模块420对应发射模块320设置,第一放大模块420用于接收发射模块320发射的探测光,并将探测光放大形成第一放大光后射出。第一放大模块420可包括第一放大器,第一放大器可为半导体光放大器(semiconductor optical amplifier,soa)芯片。辅助透镜430对应第一放大模块420设置,辅助透镜430用于接收第一放大光并改变第一放大光的光路方向,使第一放大光射向导光镜组410的中心,使第一放大光能够由导光镜组410准直后出射,同时也能使第一放大光的出射位置位于导光镜组410的中心光轴的附近,发射光路和接收光路间距较小,降低发射模块320和耦合模块330之间的扫描盲区30a。
50.在其他一些实施例中,当进入模斑转换器344的第一波导的激光束的光功率较大时,对应地,需选择能够容纳较大光功率的材质制得的第一波导,此时,可设置第一波导和发射波导322的材质不同,且第一波导能够容纳的光功率大于发射波导322能够容纳的光功率,并设置硅光芯片300还包括层间模式转换器(图中未示出),第一波导传导的激光束在层间模式转换器内通过倏逝波耦合实现层间转换至发射波导322,此时,可选地,如图8所示,设置光源模块200包括进光放大器240和第二导光镜250,第二导光镜250对应调频光源260设置,进光放大器240设于第二导光镜250和准直透镜210之间的光路上,第二导光镜250用于接收调频光源260发射的激光束并将激光束投射至进光放大器240,第二导光镜250还用于调整激光束的投射尺寸以与进光放大器240的接收端的尺寸匹配,例如,进光放大器240的接收端的尺寸较小时,第二导光镜250用于对激光束聚焦以投射至进光放大器240的接收端。进光放大器240用于将第二导光镜250传输的激光束放大,使输送至第一波导的激光束具有较大的光功率进入准直透镜210,以满足后续光功率探测需求。
51.当第一波导与接收波导332材质相同时,第一波导与接收波导332可均采用硅材料制得,以便简化形成第一波导与接收波导332的制备工艺。当第一波导能够容纳的光功率大于接收波导332能够容纳的光功率时,第一波导可采用氮化硅材料制得,接收波导332可采用硅材料制得。
52.调频连续波激光雷达10还包括封装壳体800,光源模块200、硅光芯片300和第一放大模块420均设于封装壳体800的内部空间。可选地,如图2所示,设置导光镜组410安装于封装壳体800之外的结构件上。辅助透镜430可安装于封装壳体800的内部空间,或者,如图4所
示,辅助透镜430可安装于封装壳体800之外的结构件上。封装壳体800具有供探测光穿过的第一通道,还具有供回波光穿过的第二通道。光源模块200还包括光源壳体,准直透镜210、隔离器220、第一导光镜230、进光放大器240、第二导光镜250以及调频光源260可均封装于光源壳体内形成一体,再封装于封装壳体800内。
53.调频连续波激光雷达10还包括温控模块700,温控模块700也可封装于封装壳体800的内部空间,温控模块700用于监测封装壳体800内部温度变化情况,以便观测封装壳体800内部的光源模块200和硅光芯片300等光学器件的工作状态。本技术实施例将发射模块320和耦合模块330集成于硅光芯片300,并设置导光镜组410用于接收并准直发射模块320输出的探测光、用于接收并将回波光汇聚至耦合模块330,简化了整个调频连续波激光雷达10的系统架构,使硅光芯片300和光源模块200等多个光学器件可集成安装于同一个封装壳体800内,结构紧凑,便于降低整个调频连续波激光雷达10的体积。
54.本技术实施例还提供一种自动驾驶设备,自动驾驶设备包括汽车、飞机、以及其他涉及到使用激光雷达进行智能感应和探测的设备中的一种。自动驾驶设备包括自动驾驶主体以及如上所述的调频连续波激光雷达10。调频连续波激光雷达10设于自动驾驶主体,例如,当自动驾驶设备为汽车时,自动驾驶主体包括车顶,调频连续波激光雷达10安装于汽车的车顶。
55.本实施例的附图中相同或相似的标号对应相同或相似的部件;在本技术的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
56.以上所述仅为本技术的较佳实施例而已,并不用以限制本技术,凡在本技术的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1