一种基于图像分析的压力管道缺陷检测系统及方法与流程
本发明涉及管道检测,具体为一种基于图像分析的压力管道缺陷检测系统及方法。
背景技术:
1、压力管道指的是使用一定压力输送气体或液体的管状设备,压力管道检测广泛应用与工业制氨系统、高压供气系统、燃油系统等,承担着高压、易燃、易爆和有毒介质的输送任务,若管道发生泄漏,会造成人员中毒,并且存在爆炸的风险,甚至导致灾难性事故发生,通过缺陷检测技术定期对压力管道进行缺陷检测能够有效防止压力管道损坏事故的发生;
2、现有技术中,通过人工对压力管道进行缺陷检测,不仅会消耗大量的人力和物力,而且存在检测效率低的问题,甚至有可能对管道有所破坏,利用爬行机器人对压力管道内部进行缺陷检测能够达到无损检测的目的,但是,爬行机器人工作时间有限,部分管道过长会导致爬行机器人无法完整地检测全部管道;其次,为获取管道内的完整图像,需要不断改变爬行机器人的摄像机拍摄角度,加剧了爬行机器人的电量消耗,降低了缺陷检测效率。
3、所以,人们需要一种基于图像分析的压力管道缺陷检测系统及方法来解决上述问题。
技术实现思路
1、本发明的目的在于提供一种基于图像分析的压力管道缺陷检测系统及方法,以解决上述背景技术中提出的问题。
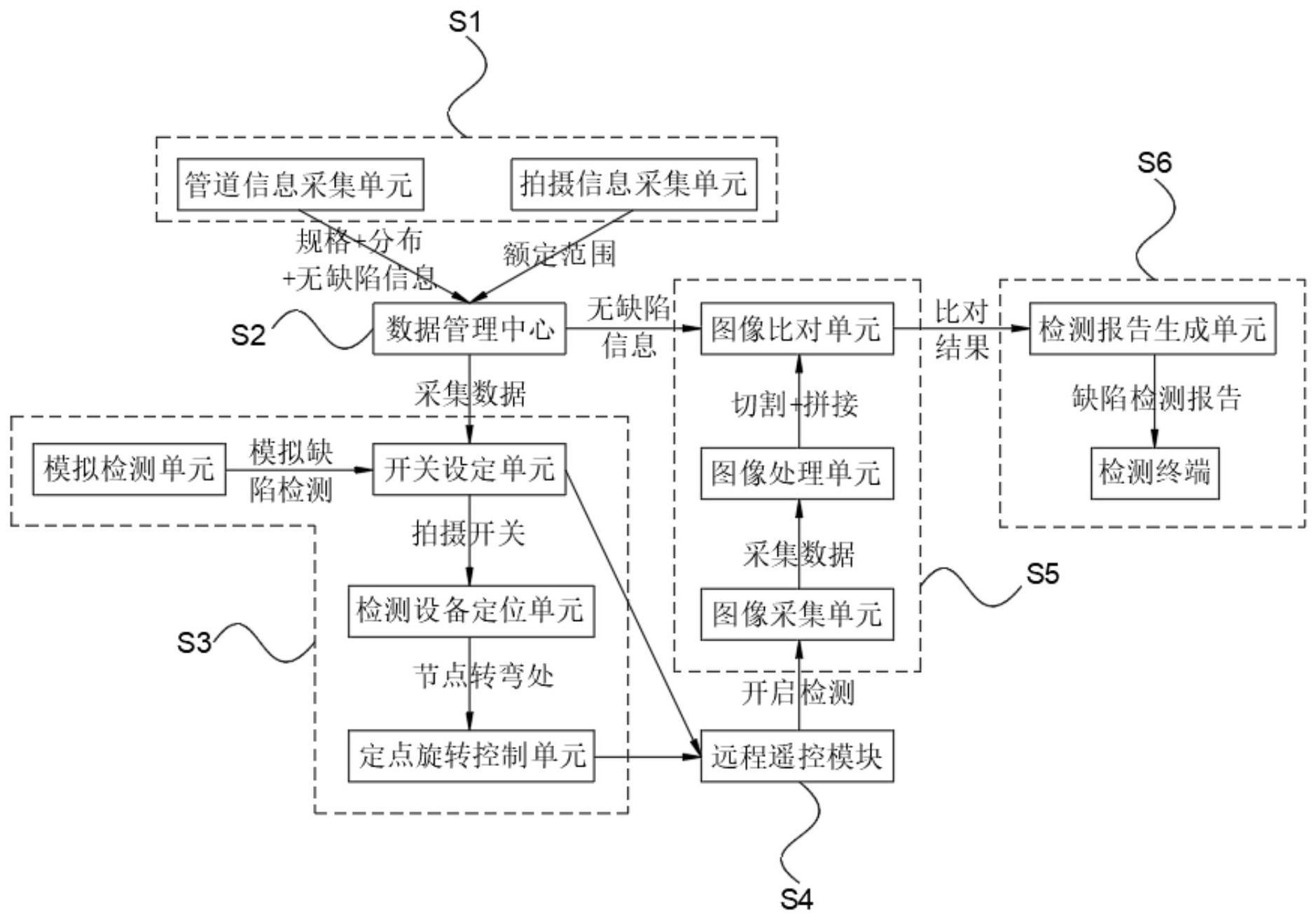
2、为了解决上述技术问题,本发明提供如下技术方案:一种基于图像分析的压力管道缺陷检测系统,其特征在于:所述系统包括:信息采集模块、数据管理中心、控制参数规划模块、远程遥控模块、图像分析模块和检测数据通信模块;
3、通过所述信息采集模块采集需要进行缺陷检测的管道信息,以及爬行机器人的拍摄范围信息;通过所述数据管理中心存储采集到的所有信息,供所述控制参数规划模块和所述图像分析模块调取;通过所述控制参数规划模块对压力管道缺陷进行模拟检测,设定爬行机器人的摄像头定点打开和关闭,对爬行机器人进行实时定位,依据采集到的管道分布信息获取管道的节点转弯处位置,设定摄像头旋转次数,控制爬行机器人在对应节点转弯处旋转摄像头,将设定打开和关闭摄像头的定点位置参数以及需要旋转摄像头的节点位置参数传输到所述远程遥控模块中;通过所述远程遥控模块依据设定的参数开启压力管道缺陷检测工作,控制爬行机器人拍摄压力管道内部图像,将拍摄的图像传输到所述图像分析模块中;通过所述图像分析模块对图像进行切割和拼接处理,获取完整的压力管道内部图像,与采集到的无缺陷压力管道图像进行比对,将比对结果传输到所述检测数据通信模块中;通过所述检测数据通信模块依据比对结果生成最终的缺陷检测报告。
4、进一步的,所述信息采集模块包括管道信息采集单元和拍摄信息采集单元,所述管道信息采集单元用于采集需要进行缺陷检测的管道长度、内径数据、整体分布数据以及无缺陷的压力管道内部图像数据;所述拍摄信息采集单元用于采集爬行机器人的图像拍摄额定角度和最远距离数据。
5、进一步的,所述控制参数规划模块包括模拟检测单元、开关设定单元、检测设备定位单元和定点旋转控制单元,所述模拟检测单元用于搭建压力管道缺陷模拟检测模型;所述开关设定单元用于结合分析爬行机器人的图像拍摄额定角度、最远距离和管道长度、宽度数据,控制爬行机器人行进到指定位置时开启摄像头,在行进过程中关闭摄像头,设定摄像头开启次数;所述检测设备定位单元用于对爬行机器人进行实时定位;所述定点旋转控制单元用于控制爬行机器人在行进到压力管道节点转弯处时旋转摄像头。
6、进一步的,所述图像分析模块包括图像采集单元、图像处理单元和图像比对单元;所述图像采集单元用于采集实际拍摄到的压力管道内部图像;所述图像处理单元用于比对采集到的图像个数是否符合设定的摄像头开启次数:若符合,对图像进行切割、拼接处理;若不符合,查找图像缺失原因,补充完整图像后再对图像进行切割、拼接处理;所述图像比对单元用于将采集到的无缺陷压力管道图像与处理后的图像进行比对,分析需要进行检测的压力管道是否存在缺陷,将比对结果传输到所述检测数据通信模块中;所述检测数据通信模块包括检测报告生成单元和检测终端,所述检测报告生成单元用于依据比对结果生成压力管道缺陷检测报告,将检测报告发送到所述检测终端。
7、一种基于图像分析的压力管道缺陷检测方法,其特征在于:包括以下步骤:
8、s11:采集管道信息和爬行机器人拍摄范围信息;
9、s12:模拟压力管道缺陷检测,设定检测控制参数;
10、s13:开启压力管道缺陷检测工作,远程控制爬行机器人采集管道内部图像;
11、s14:判断采集到的图像个数与设定参数是否符合:若符合,对图像进行切割、拼接处理;若不符合,查找图像缺失原因,在补充完整图像后再处理图像;
12、s15:比对无缺陷管道图像与处理后的图像,分析压力管道缺陷情况,生成缺陷检测报告,传输至检测终端。
13、进一步的,在步骤s11-s12中:利用管道信息采集单元采集到需要进行缺陷检测的在节点转弯前管道长度集合为a={a1,a2,...,an},其中,共有n-1处转弯节点,采集到管道内径为b,同时采集无缺陷的压力管道内部图像,利用拍摄信息采集单元采集到爬行机器人的图像拍摄最大角度为α,最远拍摄距离为d,利用模拟检测单元对压力管道进行缺陷模拟检测,利用开关设定单元设定爬行机器人开启摄像头的位置:根据下列公式计算爬行机器人前后两次开启摄像头的间距d:
14、
15、设定爬行机器人在转弯节点前每行进d时停止爬行并开启一次摄像头,在行进过程中关闭摄像头,依据拍摄最大范围和管道规格计算爬行机器人前后两次开启摄像头的间距的目的在于帮助远程遥控模块控制爬行机器人定点打开摄像头拍摄图像,确认摄像头开启和关闭的时机,在获取压力管道内完整图像的前提下节省了爬行机器人的电量,延长了续航时间,设定摄像头开启次数为m,根据下列公式获取摄像头开启次数:
16、
17、其中,d初表示爬行机器人开始检测工作前到管道起点的距离,ai表示随机一条节点转弯前管道的长度,对做四舍五入处理,利用检测设备定位单元对n-1处转弯节点进行定位,在爬行机器人到达定位点时,利用定点旋转控制单元控制爬行机器人旋转摄像头并拍摄管道内部图像,依据拍摄间距和转弯节点统计数据获取摄像头开启次数的目的在于与后续完成检测工作后获取到的图像个数进行比对,避免出现图像缺失情况,以防压力管道缺陷分析结果出现误差。
18、进一步的,在步骤s13-s14中:开启压力管道缺陷检测工作,利用远程遥控模块控制爬行机器人行进并在设定位置开启摄像头拍摄管道内部图像,在对应定位点旋转摄像头拍摄管道内部图像,统计到采集到的图像个数为m,比较m和m:若m=m,说明采集到的图像个数与设定摄像头开启次数符合,对图像进行切割、拼接处理;若m<m,说明采集的图像缺失,查找图像缺失原因并补充缺失图像,在补充完整后处理图像。
19、进一步的,所述对图像进行切割、拼接处理的具体方式为:利用边缘检测技术检测图像中的像素点是否属于前一图像检测边缘上的一点,得到所有属于前一图像检测边缘的像素点,将像素点所在区域的图像进行切割,根据下列公式计算需要除初始图像外需要切割的区域面积s:
20、
21、其中,q%表示拍摄图像与实际比例,在切割完所有图像后,将切割后的图像拼接成完整管道图像,将处理后的图像传输到图像比对单元中,在确认拍摄图像完整后利用边缘检测技术对图像进行检测切割,切割后拼接图像避免分析管道缺陷时出现视觉差而判断错误,提高了缺陷分析结果的准确性,根据图像与实际比例确认切割面积有利于提高切割后图像的完整性。
22、进一步的,在步骤s15中:利用图像比对单元调取数据管理中心中的无缺陷管道图像,与处理后的图像进行比对,标注出压力管道缺陷具体位置,分析对应位置的缺陷程度,利用检测报告生成单元生成缺陷检测报告,将其传输至检测终端。
23、与现有技术相比,本发明所达到的有益效果是:
24、本发明通过信息采集模块采集管道和爬行机器人信息数据,通过控制参数规划模块对压力管道缺陷进行模拟检测,设定爬行机器人拍摄控制参数,通过远程遥控模块开启检测工作,依据设定参数控制爬行机器人行进和拍摄图像,控制爬行机器人定点打开摄像头拍摄图像,无须旋转改变拍摄角度,在行进过程中控制爬行机器人关闭摄像头,在拍摄完整管道图像的同时有效节省了爬行机器人的电量,延长了爬行机器人的续航时间;依据管道布局确认转弯节点位置,控制爬行机器人在到达转弯节点处时旋转摄像头,弥补转弯处拍摄不到完整管道图像的弊端;在检测工作完成后,确认拍摄图像是否完整,以防出现图像缺失情况,在确认后利用边缘检测技术对图像进行检测切割,切割后拼接图像避免分析管道缺陷时出现视觉差而判断错误,提高了缺陷分析结果的准确性。
- 还没有人留言评论。精彩留言会获得点赞!