一种基于测试系统整体与局部位移的多维力解耦方法
本发明属于发动机多维力测试,涉及一种基于测试系统整体与局部位移的多维力解耦方法,可实现多维力同时作用时发动机及动架产生空间位移下测试系统输出的耦合消除,有效提高多维力测试精度。
背景技术:
1、随着航空发动机体积与推力的不断增大,发动机多维推力测量大部分采用空间分布式台架进行。发动机与动架固定连接,在发动机动架周围布置6个测点,每个测点布置一个测力组件,组件中串联力传感器。测力组件主向刚度要远大于侧向刚度,减小对传感器受力的分载。六个测力组件共限制动架的六个自由度。通过计算六个传感器输出值,即可获取发动机产生的多维推力参数。
2、在推力测量过程中,由于测力组件侧向刚度较弱以及测力组件位置非对称的原因。在测试过程中,尤其是多维力同时作用时,测力组件会发生位移,发动机与动架位置发生变化。导致发动机传力作用线发生改变,传感器输出方向与理想方向发生偏差,造成多维力之间的耦合。
3、在目前的解耦方法中,包括线性解耦与非线性解耦。线性解耦通过建立单方向干扰矩阵,对矩阵进行整合,对多方向加载进行解耦;非线性解耦则通过深度学习等方法,对实验数据进行训练,同样能够实现解耦的效果。现有的解耦方法都是从数据出发,并未溯源耦合产生的原因。这种方法对整体数据可能有效,但对于每个单个测力组件的输出以及测试系统局部状态的监测缺乏数据还原。为此,亟需一种能够同时考虑发动机与动架位置变化和测力组件位移的多维力协同作用下的解耦方法,从原理上进行解耦。
技术实现思路
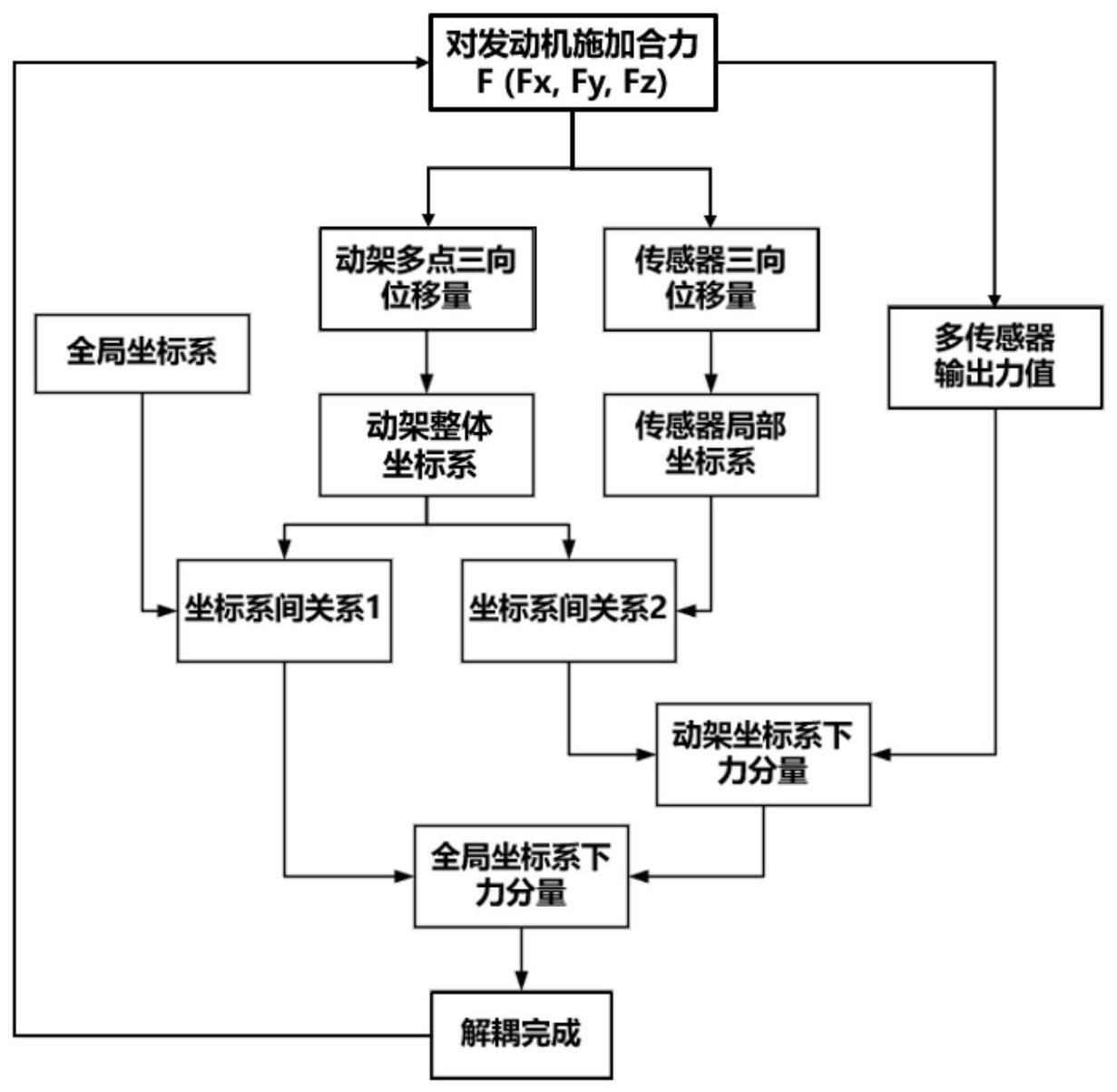
1、本发明为克服现有技术的缺陷,本发明提供一种基于测试系统整体与局部位移的多维力解耦方法。首先对测试系统尾部施加一个多维复合力,通过测量组件尾端以及传感器部分的位移建立局部坐标系,计算局部坐标系之间、局部坐标系与全局坐标系之间的关系,结合力平衡方程以及各点传感器输出对输入力进行解耦。
2、为了达到上述目的,本发明采用的技术方案为:
3、一种基于测试系统整体与局部位移的多维力解耦方法,所述多维力解耦方法基于测试系统实现,测试系统包括发动机模型、动架、测力组件、定架、合力产生装置五部分。首先对测试系统施加一个合力,在测力组件及动架周围布置位移测量装置,分别测量得到六个测力组件受力下单向力传感器两侧连接部位的的三向位移量,在每个单向力传感器中心分别建立各传感器局部坐标系;同时测量动架与被测发动机的整体三向位移分量,建立动架整体坐标系;其次,计算动架局部坐标系与测力组件中动架整体坐标系之间的角度偏转,结合传感器测力方向,算得动架整体坐标系下的传感器位置的三个方向分力,再通过动架整体坐标系与全局坐标系之间的偏转,即可对输入多维力进行解耦。
4、具体步骤如下:
5、第一步:合力作用下测试系统的位移测量
6、所述的测试系统主要包括发动机模型、动架、多个测力组件、定架、合力产生装置五部分。其中定架固定。所述发动机模型为被测体,与动架固定连接,两者之间不产生位移。所述的动架为发动机支撑结构,其内侧与发动机固定,外侧与测力组件连接。所述测力组件按照一定规律布置于动架与定架之间,每个测力组件中间含有一个单向力传感器,用来测量发动机所受外力。测试系统的一端设置一个合力产生装置,用来产生标准合力,合力可分解为三个方向分力。进一步的,所述的测力组件共有六个,分别设于测试系统x、y、z方向。定义发动机轴向为x方向,竖直方向为z方向,水平方向为y方向,作为全局坐标系。
7、在每个测力组件中单向力传感器的两侧连接部位布置两个方向的位移测量装置,在动架相邻的三条边上布置位移测量装置。通过合力产生装置对发动机一端施加合力。采用阶梯加载的方式,重复多次加载,记录每个测力组件中单向力传感器输出数据,取多次实验数据的平均值记为fi(i=1,2,3···)。测量每次阶梯加载稳定后每个测力组件中单向力传感器上下位置的位移测量装置及动架上位移测量装置的输出值,同样取多次实验测量结果平均值,最终得到测力组件中单向力传感器受力下两侧连接部位的动架局部三向位移量,在单向力传感器中心建立动架局部坐标系。同时测量动架与被测发动机的整体三向位移分量,建立动架整体坐标系。
8、第二步:建立局部坐标系并计算偏移角度
9、根据测量得到的测力组件中单向力传感器两侧连接结构的三向位移量,确定传感器局部坐标系中轴向坐标轴偏斜向量zi0(i=1,2,3···),获取传感器偏转后的轴向坐标轴方向角。对动架整体在三个方向选取两个端点位移测量数据进行处理,获取动架整体坐标系的每个坐标轴在全局坐标系下的向量。将各测力组件的局部坐标系中单向力传感器轴向方向的坐标轴与动架的整体坐标系进行角度计算,建立传感器测量方向与动架三个方向之间的关系模型,为多维力解耦计算提供角度参考。
10、第三步:测试系统输出数据解耦
11、根据动架整体坐标系与各测力组件传感器局部坐标系转角关系,将每个测力组件中单向力传感器输出力值根据动架整体坐标系进行分解,可得到动架整体坐标系下三个方向分力,对各测力组件中单向力传感器在动架坐标系下三个方向分力进行加和,即可得到动架整体坐标系下三个方向输出力值,再通过动架坐标系三个坐标轴在全局坐标系下的转角,即可对输出数据进行解耦。
12、本发明的有益效果:
13、(1)本发明针对发动机推力测试系统受多维力下的位移导致的耦合问题,通过测量合力作用下测试系统的每个测力组件中传感器偏斜向量,重新建立位移后的每个传感器的局部坐标系以及动架整体坐标系,获取每个传感器坐标系中轴向坐标轴与动架坐标系之间的转角关系,根据传感器主要测量方向,计算出动架整体坐标系下三个方向分力。进而计算全局坐标系下三方向分力,实现输入力高精度解耦。
14、(2)本方法溯源了维间耦合的产生原因,建立了位移后传感器局部坐标系、动架整体坐标系以及全局坐标系之间的角度关系,解决了其他方法中精度低、数据拟合与求解过程繁琐且难以理解等问题,提高了测试系统的测试精度。
技术特征:
1.一种基于测试系统整体与局部位移的多维力解耦方法,其特征在于,所述多维力解耦方法基于测试系统实现,测试系统包括发动机模型、动架、测力组件、定架、合力产生装置五部分;首先,对测试系统施加一个合力,在测力组件及动架周围布置位移测量装置,分别测量得到六个测力组件受力下单向力传感器两侧连接部位的的三向位移量,在每个单向力传感器中心分别建立各传感器局部坐标系;同时测量动架与被测发动机的整体三向位移分量,建立动架整体坐标系;其次,计算动架局部坐标系与测力组件中动架整体坐标系之间的角度偏转,结合传感器测力方向,算得动架整体坐标系下的传感器位置的三个方向分力;最后,通过动架整体坐标系与全局坐标系之间的偏转,即可对输入多维力进行解耦。
2.根据权利要求1所述的一种基于测试系统整体与局部位移的多维力解耦方法,其特征在于,包括以下步骤:
技术总结
一种基于测试系统整体与局部位移的多维力解耦方法,属于发动机多维力测试技术领域。针对发动机推力测试系统中受力位移对于测试过程的影响,首先通过合力发生装置产生一个确定的多维复合力,不同位置的测力组件在力的作用下会产生不同的位移,通过测量得到每个组件中传感器所在位置的位移量,获取传感器轴线偏斜坐标系。同时测量动架与发动机整体的三向位移分量,并建立动架整体坐标系。计算动架坐标系与测力组件中传感器坐标系之间的角度偏转,结合传感器实际输出力值,得到动架坐标系下的三个方向分力,再通过动架坐标系与全局坐标系之间的偏关系,对数据进行解耦还原。本发明溯源了耦合产生原因,能够简化计算过程,提高解耦精度。
技术研发人员:任宗金,李新阳,张巍,张军,孙文举,温晓杰,林山,周伟
受保护的技术使用者:大连理工大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!