编码器模组、驱动结构及机器人的制作方法
本申请涉及机器人领域,具体而言,涉及一种编码器模组、驱动结构及机器人。
背景技术:
1、编码器是将角位移转换成电信号的装置,可以用来检测转轴的转速。目前,通常将编码器的码盘固定于转轴的一端。转轴在旋转过程中,随着减速器的磨损,转轴会发生跳动,进而会造成码盘和检测装置相对位置发生变化,进而影响编码器的检测准确性。
技术实现思路
1、有鉴于此,本申请实施例的目的在于提供一种编码器模组、驱动结构及机器人。能够提高编码器的检测精度。
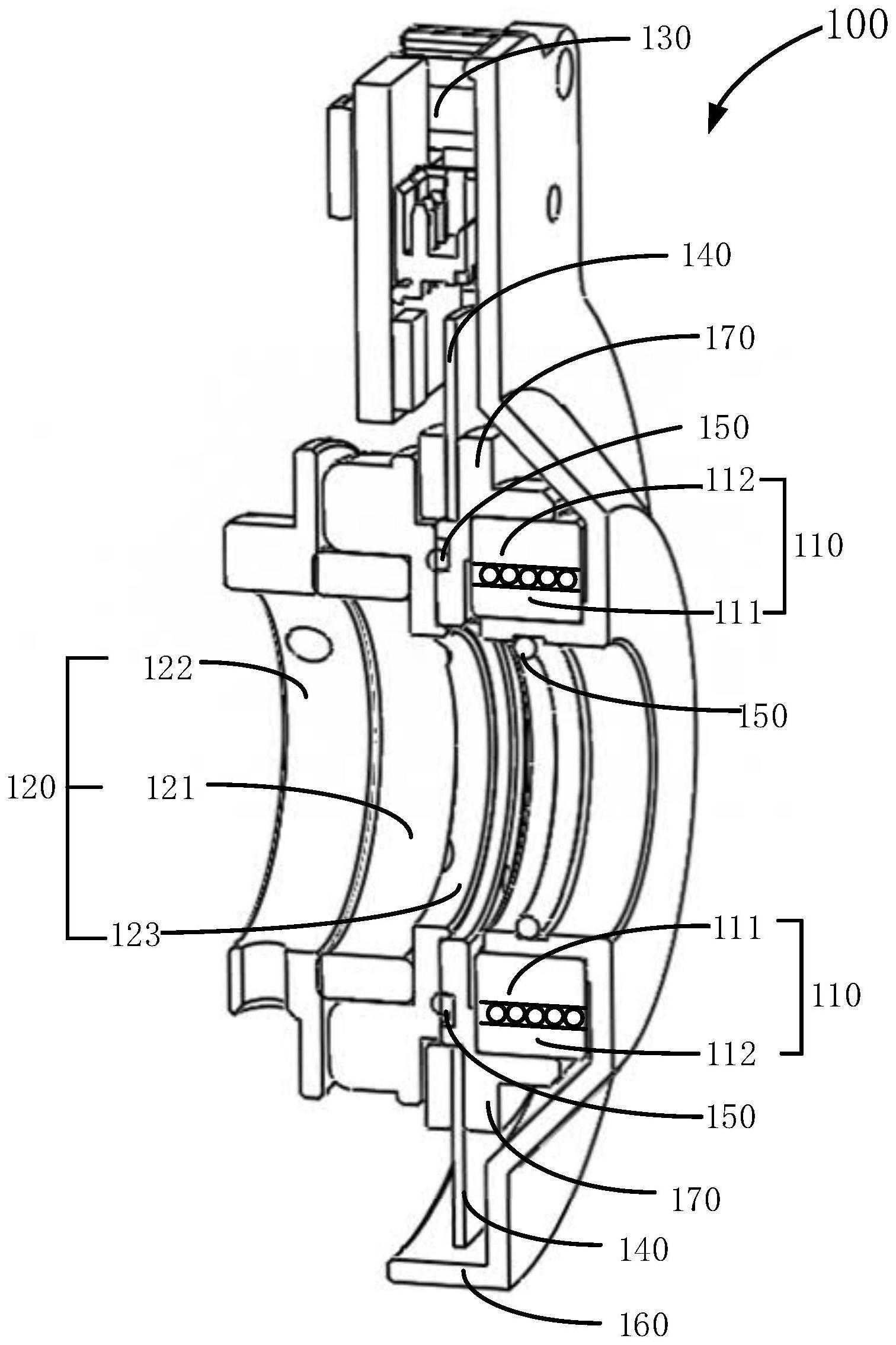
2、第一方面,本申请实施例提供了一种编码器模组,包括:编码器、支承件与连接组件;所述支承件的外侧与固定装置连接,所述支承件的内侧套设在转轴上;所述连接组件的外侧与所述编码器固定连接,所述连接组件的内侧与所述转轴固定连接;其中,所述连接组件配置为连接所述转轴与所述编码器并平衡所述转轴的径向跳动。
3、上述实现过程中,通过在编码器模组中设置连接组件,通过该连接组件将转轴与编码器连接,以在该转轴旋转时通过该连接组件对该转轴径向跳动进行补偿,减少了转轴在旋转时的跳动,进而保证了编码器的编码器为相对位置不发生变化,提高了编码器模组检测的准确性。
4、在一个实施例中,所述连接组件包括:弹性件;所述弹性件的一侧与所述编码器固定连接,所述弹性件的另一侧与所述转轴固定连接;其中,所述弹性件配置为连接所述转轴与所述编码器并补偿所述转轴的径向跳动。
5、上述实现过程中,通过设置弹性件,并将弹性件与转轴连接,转轴在旋转时将产生跳动的扭矩传递至弹性件,弹性件在该扭矩作用下发生形变,以实现将转轴产生的跳动扭矩进行转移,实现了对转轴产生的跳动进行补偿。防止了该转轴因为跳动而造成编码器与转轴产生碰撞而影响该转轴和编码器的质量,延长了转轴和编码器的使用寿命。
6、在一个实施例中,所述连接组件包括:固定件和弹性件;所述固定件与所述转轴固定连接;所述弹性件设置在所述固定件一侧,与所述固定件的一侧连接;所述固定件的另一侧与所述编码器固定连接;其中,所述弹性件配置为补偿所述转轴的径向跳动。
7、在一个实施例中,所述固定件包括:第一固定件和第二固定件;所述第一固定件和所述第二固定件相对设置,所述弹性件设置在所述第一固定件和所述第二固定件之间;所述第一固定件远离所述弹性件的一侧与所述转轴固定连接;所述第二固定件远离所述弹性件的一侧一端所述编码器固定连接;其中,所述弹性件配置为补偿所述转轴的径向跳动。
8、上述实现过程中,通过设置第一固定件、第二固定件和弹性件,并将弹性件设置在第一固定件和第二固定件之间,以通过第一固定件和第二固定件别与编码器和转轴连接。由于该第一固定件和第二固定件是刚性元件,能够保证与编码器和转轴连接的稳定性,提高了编码器与转轴连接的稳定性。另外,通过将该第一固定件、第二固定件和弹性件相对设置而组成的结构为柔性爪式连接,能够方便拆装。
9、在一个实施例中,所述编码器还包括:码盘和固定座;所述固定座设置在所述支承件和所述连接组件之间,所述固定座与所述第二固定件固定连接;所述码盘的一端与设置在所述固定座上;所述码盘的另一端贯穿至所述编码器;其中,所述码盘配置为在所述转轴旋转时通过所述连接组件旋转,所述编码器配置为通过获取所述码盘的位置确定所述转轴的转速。
10、上述实现过程中,通过设置码盘,并将码盘通过固定座与连接组件连接,使得码盘能够随着转轴的旋转而旋转,进而实现对转轴的转速进行计数,由于该码盘是随着转轴进行旋转的,能够真实的反应转轴的转速,提高了编码器检测的检测准确性。
11、在一个实施例中,所述编码器还包括:所述编码器还包括:密封件;所述密封件设置在所述连接组件与所述转轴之间,并配置为隔离所述编码器模组内部与所述编码器模组外部的环境。
12、在上述实现过程中,通过在连接组件和转轴之间设置密封件,能够将该编码器模组内部与编码器模组外部隔离为两个相互独立且密闭的空间,使得且两个空间之间的油脂或灰尘不会相互影响,能够保证编码器模组内部空间的干燥、清洁。
13、在一个实施例中,所述密封件的数量为多个;多个所述密封件分别设置在所述编码器模组的各个部件连接处与所述编码器模组各部件的通孔处,并配置为隔离所述编码器模组的各个部件之间的环境。
14、在上述实现过程中,通过在编码器模组的各个部件连接处设置密封件,能够将该编码器模组各个部件之间的环境相互隔离开来,使得编码器模组各个部件之间的油脂或灰尘不会相互影响,能够保证编码器模组各个部件的干燥、清洁。
15、第二方面,本申请实施例还提供一种驱动结构,包括:电机、转轴与第一方面任意一项所述的编码器模组;所述转轴与所述电机连接,并配置为在所述电机的驱动下旋转;所述转轴的一端与所述编码器模组固定连接,所述编码器模组配置为检测所述转轴的转速。
16、在上述实现过程中,通过在转轴上设置上述编码器模组,可以通过该编码器模组将转轴与固定装置连接,以通过固定装置限制旋转在旋转方向上的位置,减少了该转轴的抖动,进而防止了编码器模组的码盘和检测装置的相对位置发生变化,提高了编码器模组的检测精度。
17、在一个实施例中,所述转轴包括:第一转轴与第二转轴,所述编码器模组包括第一编码器和第二编码器;所述第一编码器与所述第一转轴的一端固定连接,所述第一编码器配置为检测所述第一转轴的转速;所述第二编码器与所述第二转轴的一端固定连接,所述第二编码器配置为检测所述第二转轴的转速。
18、在上述实现过程中,对于有多个转轴的驱动结构,每个转轴均可设置对应的编码器,以分别对不同转轴的转速进行检测,能够及时的反应出各个转轴的转速异常的情况,保证了驱动结构工作的准确性。
19、第三方面,本申请实施例还提供一种机器人,包括:控制器以及与所述控制器连接的第二方面任意一项所述的驱动结构;其中,所述控制器配置为控制所述驱动结构进行工作。
20、在上述实现过程中,通过在机器人中设置配置有上述编码器模组的驱动结构,由于该编码器模组能够反馈准确的转轴的转速,控制器通过获取到这些较为准确的转速能够准确判断出驱动结构当前工作状态,进而根据该实际情况控制该驱动结构执行下一个动作,保证了控制器的精准控制,提高了机器人工作的准确性。
21、为使本申请的上述目的、特征和优点能更明显易懂,下文特举实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种编码器模组,其特征在于,包括:编码器、支承件与连接组件;
2.根据权利要求1所述的编码器模组,其特征在于,所述连接组件包括:弹性件;
3.根据权利要求1所述的编码器模组,其特征在于,所述连接组件包括:固定件和弹性件;
4.根据权利要求3所述的编码器模组,其特征在于,所述固定件包括:第一固定件和第二固定件;
5.根据权利要求4所述的编码器模组,其特征在于,所述编码器还包括:码盘和固定座;
6.根据权利要求1所述的编码器模组,其特征在于,所述编码器还包括:密封件;
7.根据权利要求6所述的编码器模组,其特征在于,所述密封件的数量为多个;
8.一种驱动结构,其特征在于,包括:电机、转轴与权利要求1-7任意一项所述的编码器模组;
9.根据权利要求8所述的驱动结构,其特征在于,所述转轴包括:第一转轴与第二转轴,所述编码器模组包括第一编码器和第二编码器;
10.一种机器人,其特征在于,包括:控制器以及与所述控制器连接的权利要求8或9所述的驱动结构;
技术总结
本申请提供了一种编码器模组、驱动结构及机器人,其中,编码器模组包括:编码器、支承件与连接组件;支承件的外侧与固定装置连接,支承件的内侧套设在转轴上;连接组件的外侧与编码器固定连接,连接组件的内侧与转轴固定连接;连接组件配置为连接转轴与编码器并平衡转轴的径向跳动。本申请通过将转轴通过编码器模组的连接组件与编码器连接,在转轴旋转时该固定装置能限制该转轴在旋转方向的位置,进而减少了该转轴在旋转时的跳动,能够提高编码器的检测精度。
技术研发人员:朱春晓,邵威,吴为,翟嘉心,许雄
受保护的技术使用者:节卡机器人股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!