一种连续旋转体制雷达的伺服停转方法与流程
本发明涉及一种伺服停转方法。更具体地,涉及一种连续旋转体制雷达的伺服停转方法。
背景技术:
1、连续旋转体制雷达在工作过程中往往要求雷达伺服在方位方向上做长时间高速连续旋转,从而带动雷达波束在空间方向上做360°扫描进行探测。连续旋转体制雷达在工作结束后,希望能从工作转速逐渐减速,最后停止到收藏位置;同时随着雷达技术的发展,连续旋转体制雷达也可以对准固定指向进行工作,这也要求伺服能够按照给定的加速度从工作转速逐渐减速并最终定位在任意位置。
2、由于连续旋转体制雷达转速高,惯量大,在停转的过程中希望能按照一定的加速度进行减速,不发生冲击和振荡,避免损坏天线。因此,需要提供一种连续旋转体制雷达的伺服停转方法。
技术实现思路
1、本发明的一个目的在于提供一种连续旋转体制雷达的伺服停转方法。
2、为达到上述目的,本发明采用下述技术方案:
3、一种连续旋转体制雷达的伺服停转方法,包括:
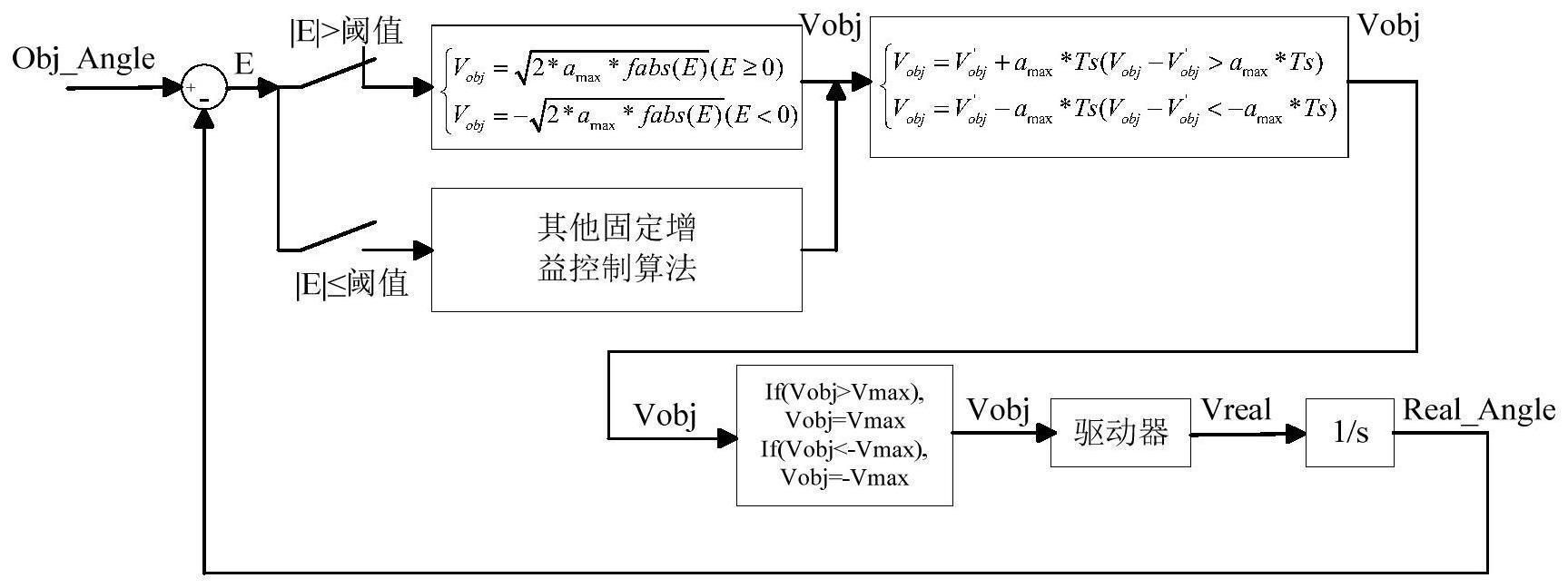
4、根据雷达伺服系统指令位置和雷达的当前位置,计算出雷达伺服系统中位置环误差的绝对值;
5、当所述位置环误差的绝对值大于误差阈值时,所述位置环采用变增益控制算法控制输出目标速度,
6、所述位置环误差的绝对值小于等于误差阈值时,所述位置环采用其他已知控制算法控制输出目标速度;
7、分别按设定加速度和速度限制位置环输出的目标速度的变化率和大小。
8、优选地,当雷达需要连续旋转时,将伺服系统指令位置设为随时间连续变化的控制指令位置值序列,控制指令位置值序列中任意相邻两个位置值差分后得到的速度为伺服系统的工作转速。
9、优选地,当雷达需要从连续旋转切换到停转时,将伺服系统的指令位置直接置为停转位置。
10、优选地,该方法进一步包括,根据雷达伺服系统能力确定变增益控制算法和其他已知控制算法切换的误差阈值,所述误差阈值上限确定方法包括:
11、使用其他已知控制算法对雷达伺服系统进行阶跃测试,测试得到振荡次数不超过1.5次的最大阶跃幅值作为误差阈值上限;
12、优选地,所述误差阈值下限为
13、
14、其中kpmax为使用纯比例控制算法测试雷达伺服系统得到位置环稳定的最大纯比例增益,amax为设定的最大加速度。
15、优选地,所述当位置环误差的绝对值大于误差阈值时,位置环采用变增益控制算法;
16、e≥0时,
17、e<0时,
18、其中e为位置环误差,vobj为当前拍位置环输出的目标速度,amax为设定的最大加速度。
19、优选地,所述对位置环输出的目标速度的变化率按照设定加速度进行限制包括:
20、if(vobj-v'obj>amax*ts),vobj=v'obj+amax*ts,
21、if(vobj-v'obj<-amax*ts),vobj=v'obj-amax*ts,
22、其中vobj为当前拍位置环输出的目标速度,v'obj为前一拍位置环输出的目标速度,amax为设定的最大加速度,ts为雷达伺服系统控制周期。
23、优选地,所述对位置环输出的目标速度的大小进行限制包括:
24、if(vobj>vmax),vobj=vmax,
25、if(vobj<-vmax),vobj=-vmax,
26、其中vobj为当前拍位置环输出的目标速度,vmax为雷达伺服系统能达到的最大速度。
27、优选地,所述对位置环输出的目标速度的大小进行限制包括:
28、根据雷达伺服系统能达到的最大速度,对位置环输出的目标速度的大小进行限制。
29、优选地,该方法进一步包括将经限制的目标速度输送到雷达伺服系统的驱动器,所述驱动器带动天线运动。
30、本发明的有益效果如下:
31、本发明不需要复杂的计算和状态切换,可以在转动的任意时刻实施停转并停转到指定角度,减速过程的加速度受控,无冲击,能保护天线的安全。
技术特征:
1.一种连续旋转体制雷达的伺服停转方法,其特征在于,包括:
2.根据权利要求1所述连续旋转体制雷达的伺服停转方法,其特征在于,当雷达需要连续旋转时,将伺服系统指令位置设为随时间连续变化的控制指令位置值序列,控制指令位置值序列中任意相邻两个位置值差分后得到的速度为伺服系统的工作转速。
3.根据权利要求1所述连续旋转体制雷达的伺服停转方法,其特征在于,当雷达需要从连续旋转切换到停转时,将伺服系统的指令位置直接置为停转位置。
4.根据权利要求1所述连续旋转体制雷达的伺服停转方法,其特征在于,该方法进一步包括,根据雷达伺服系统能力确定变增益控制算法和其他已知控制算法切换的误差阈值,所述误差阈值上限确定方法包括:
5.根据权利要求4所述连续旋转体制雷达的伺服停转方法,其特征在于,所述误差阈值下限为
6.根据权利要求1所述连续旋转体制雷达的伺服停转方法,其特征在于,所述当位置环误差的绝对值大于误差阈值时,位置环采用变增益控制算法;
7.根据权利要求1所述连续旋转体制雷达的伺服停转方法,其特征在于,所述对位置环输出的目标速度的变化率按照设定加速度进行限制包括:
8.根据权利要求1所述连续旋转体制雷达的伺服停转方法,其特征在于,所述对位置环输出的目标速度的大小进行限制包括:
9.根据权利要求1所述连续旋转体制雷达的伺服停转方法,其特征在于,所述对位置环输出的目标速度的大小进行限制包括:
10.根据权利要求1所述连续旋转体制雷达的伺服停转方法,其特征在于,该方法进一步包括将经限制的目标速度输送到雷达伺服系统的驱动器,所述驱动器带动天线运动。
技术总结
本发明公开一种连续旋转体制雷达的伺服停转方法,包括:根据雷达伺服系统指令和雷达的实际位置,计算出雷达伺服系统中位置环误差的绝对值;当所述位置环误差的绝对值大于误差阈值时,所述位置环采用变增益控制算法控制输出目标速度,所述位置环误差的绝对值小于等于误差阈值时,所述位置环采用其他已知控制算法控制输出目标速度;本发明不需要复杂的计算和状态切换,可以在转动的任意时刻实施停转并停转到指定角度,减速过程的加速度受控,无冲击,能保护天线的安全。
技术研发人员:徐初隆,张寒冰,谭军
受保护的技术使用者:北京无线电测量研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!