一种基于STM32的三维空间无线定位方法
一种基于stm32的三维空间无线定位方法
技术领域
1.本发明属于通信领域技术领域,具体为一种基于stm32的三维空间无线定位方法。
背景技术:
2.现阶段全球导航卫星系统(gnss)的相关技术已经比较成熟,主要由美国gps、俄罗斯glonass、欧盟galileo和中国北斗组成。gnss系统的发展同时带动着相关产业和定位仪器的广泛应用。由于定位系统存在着自身的局限性,因此很难在信号微弱甚至没有导航信号的环境进行相关定位。对于任何国家而言,地质勘测、矿产开采等户外作业都对于国家及社会的发展具有重要作用。近年来,随着煤矿、油气资源勘探等应用需求的不断增加,对实现无导航卫星信号的仪器定位提出了更高的要求。世界各国对于无线定位的研究主要集中在一般环境即有导航卫星信号或者导航信号强的环境下,对于弱信号定位的研究尚不完善。
3.目前,国内外对微弱信号的无线定位研究主要依靠高灵敏度的导航卫星信号接收技术和辅助(a-gps)技术,在接收机的信号接收算法上进行创新,然而,单纯依靠高灵敏度信号捕获跟踪技术获取导航卫星的微弱信号并进行各个仪器的定位,价格昂贵的同时且难以解决全球定位系统信号无法到达的情况,单片机(mcu)作为一种常用的硬件,具有广泛的应用范围,依靠单片机之间的相互通信传输相关位置信息能极大地减少成本及人力物力的消耗,过去常用的有线单片机通信系统,由于布线复杂、人力物力消耗过大、成本较高,不适合需要大规模布置数据采集仪器的应用场景;因此,针对目前的状况,现需对其进行改进。
技术实现要素:
4.针对上述情况,为克服现有技术的缺陷,本发明提供一种基于stm32的三维空间无线定位方法,有效的解决了单纯依靠高灵敏度信号捕获跟踪技术获取导航卫星的微弱信号并进行各个仪器的定位,价格昂贵的同时且难以解决全球定位系统信号无法到达的情况,同时过去常用的有线单片机通信系统,由于布线复杂、人力物力消耗过大、成本较高,不适合需要大规模布置数据采集仪器的应用场景的问题。
5.为实现上述目的,本发明提供如下技术方案:一种基于stm32的三维空间无线定位方法,包括以下步骤:
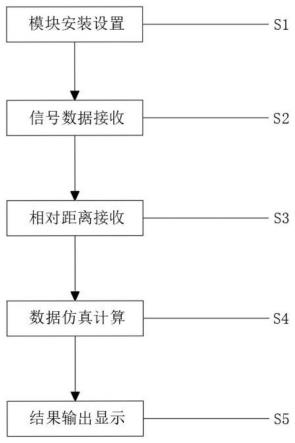
6.s1:模块安装设置:首先准备该三维空间无线定位需要的设备,即单片机stm32f407、gps接收模块、激光测距模块、无线通信模块以及液晶显示模块,其中,单片机stm32f407、无线通信模块以及液晶显示模块数量一致,gps接收模块和激光测距模块数量一致,且单片机stm32f407、无线通信模块以及液晶显示模块均至少高于gps接收模块和激光测距模块一台,在进行安装时,将单片机stm32f407、gps接收模块、无线通信模块以及液晶显示模块分为4组,其中一组设置在需要定位的点,并编号为a组,其他三组围绕该组进行设置,并编号为b组、c组以及d组,且b组、c组以及d组均设置有激光测距模块;
7.s2:信号数据接收:在上述步骤s1的基础上,通过b组设备的gps接收模块对gps信
号进行接收,并通过gps信号计算得到b组设备的三维位置即经度、纬度和高度,并通过液晶显示模块进行显示,c组以及d组的gps接收模块均重复b组的操作,由此得到b组、c组以及d组的三维位置;
8.s3:相对距离接收:通过b组设备无线通信模块与a组设备的无线通信模块取得联络,并通过b组设备的激光测距模块获取b组设备和a组设备点与点之间的单向距离,并通过液晶显示模块进行显示,c组以及d组的激光测距模块、无线通信模块和液晶显示模块均重复b组的操作,由此得到b组、c组以及d组与a组之间的单向距离;
9.s4:数据仿真计算:在上述步骤s2以及s3的基础上,通过b组、c组以及d组的三维位置以及与a组之间的单向距离的数据,将其代入数据仿真算法,由此推断出a组的单片机位置即a组的点的位置;
10.s5:结果输出显示:在上述步骤上,将a组、b组、c组以及d组的单片机stm32f407三维位置通过gis显示系统显示,并对推断出的a组的点的位置进行gis显示系统的显示,完成三维空间无线定位。
11.优选的,所述gps接收模块具体包括蓝牙接收器、cf接收器或usb接收器中的一种或几种的组合;所述激光测距模块具体包括连续激光测距仪或脉冲激光测距仪;所述无线通信模块具体包括无线电台、无线电视或无线局域网中的一种或几种的组合。
12.优选的,所述gps接收模块对gps信号接收的方法具体为步进相关法、滑动相关法、序贯估值法或序列匹配滤波器法中的一种或几种的组合。
13.优选的,所述激光测距模块进行单向距离的获取时采用的方法具体为激光飞行时间法或三角法,其中,所述激光飞行时间法具体包括脉冲调制法或激光连续波调制法。
14.优选的,所述数据仿真算法在进行数据仿真推断时,具体步骤为:
①
:对b组、c组以及d组的三维位置以及与a组之间的单向距离的数据进行获取;
②
:对b组的三维位置进行标点,且通过b组与a组之间的单向距离的数据,获取a组第一推断点,同时c组以及d组均重复b组操作,得到a组第二推断点以及a组第三推断点;
③
:根据得到的第一推断点、第二推断点以及第三推断点进行标点,并根据三点重合得到a组最终推断点。
15.优选的,所述数据仿真算法具体包括数据拟合、参数估计或插值中的一种或几种的组合。
16.优选的,所述gis显示系统具体为workstationarcinfo、intergraph、mapinfoprofessional或mapgis中的一种或几种的组合。
17.与现有技术相比,本发明的有益效果是:1、在无信号情况下可以实现仪器的相关定位,不需要大量人力物力,从而达到成本最小化,由于工作场景为人迹罕至的平原地带,因而仪器的高度位置相对不变,除此之外,由于无建筑物遮挡,激光模块有较大的应用范围(1-2km),因而有较小的定位误差,该设计在一定程度上推动旷野的户外工作;
18.2、成本较低,技术难度较小的条件下实现同样的定位功能,定位精度在95%以上,可以较好的满足各类仪器在煤矿、矿产开采,地质资源勘探等场景下的应用,进而带动相关产业的经济发展;
19.3、通过设置gis显示系统显示,可直观且明显的得到定位点的推断点,由此可根据点进行后续操作,方便后台管理人员进行操作管理,为其带来了便利。
附图说明
20.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
21.在附图中:
22.图1为本发明一种基于stm32的三维空间无线定位方法流程图;
23.图2为本发明一种基于stm32的三维空间无线定位方法设备设置图。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例;基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.如图1所示,本发明提供一种技术方案:一种基于stm32的三维空间无线定位方法,包括以下步骤:
26.s1:模块安装设置:首先准备该三维空间无线定位需要的设备,即单片机stm32f407、gps接收模块、激光测距模块、无线通信模块以及液晶显示模块,其中,单片机stm32f407、无线通信模块以及液晶显示模块数量一致,gps接收模块和激光测距模块数量一致,且单片机stm32f407、无线通信模块以及液晶显示模块均至少高于gps接收模块和激光测距模块一台,在进行安装时,将单片机stm32f407、gps接收模块、无线通信模块以及液晶显示模块分为4组,其中一组设置在需要定位的点,并编号为a组,其他三组围绕该组进行设置,并编号为b组、c组以及d组,且b组、c组以及d组均设置有激光测距模块;
27.s2:信号数据接收:在上述步骤s1的基础上,通过b组设备的gps接收模块对gps信号进行接收,并通过gps信号计算得到b组设备的三维位置即经度、纬度和高度,并通过液晶显示模块进行显示,c组以及d组的gps接收模块均重复b组的操作,由此得到b组、c组以及d组的三维位置;
28.s3:相对距离接收:通过b组设备无线通信模块与a组设备的无线通信模块取得联络,并通过b组设备的激光测距模块获取b组设备和a组设备点与点之间的单向距离,并通过液晶显示模块进行显示,c组以及d组的激光测距模块、无线通信模块和液晶显示模块均重复b组的操作,由此得到b组、c组以及d组与a组之间的单向距离;
29.s4:数据仿真计算:在上述步骤s2以及s3的基础上,通过b组、c组以及d组的三维位置以及与a组之间的单向距离的数据,将其代入数据仿真算法,由此推断出a组的单片机位置即a组的点的位置;
30.s5:结果输出显示:在上述步骤上,将a组、b组、c组以及d组的单片机stm32f407三维位置通过gis显示系统显示,并对推断出的a组的点的位置进行gis显示系统的显示,完成三维空间无线定位。
31.其中,gps接收模块具体包括蓝牙接收器、cf接收器或usb接收器中的一种或几种的组合;激光测距模块具体包括连续激光测距仪或脉冲激光测距仪;无线通信模块具体包括无线电台、无线电视或无线局域网中的一种或几种的组合;gps接收模块对gps信号接收的方法具体为步进相关法、滑动相关法、序贯估值法或序列匹配滤波器法中的一种或几种
的组合;激光测距模块进行单向距离的获取时采用的方法具体为激光飞行时间法或三角法,其中,激光飞行时间法具体包括脉冲调制法或激光连续波调制法;数据仿真算法在进行数据仿真推断时,具体步骤为:
①
:对b组、c组以及d组的三维位置以及与a组之间的单向距离的数据进行获取;
②
:对b组的三维位置进行标点,且通过b组与a组之间的单向距离的数据,获取a组第一推断点,同时c组以及d组均重复b组操作,得到a组第二推断点以及a组第三推断点;
③
:根据得到的第一推断点、第二推断点以及第三推断点进行标点,并根据三点重合得到a组最终推断点;数据仿真算法具体包括数据拟合、参数估计或插值中的一种或几种的组合;gis显示系统具体为workstationarcinfo、intergraph、mapinfoprofessional或mapgis中的一种或几种的组合。
32.通过上述步骤,在无信号情况下可以实现仪器的相关定位,不需要大量人力物力,从而达到成本最小化,由于工作场景为人迹罕至的平原地带,因而仪器的高度位置相对不变,除此之外,由于无建筑物遮挡,激光模块有较大的应用范围(1-2km),因而有较小的定位误差,该设计在一定程度上推动旷野的户外工作;成本较低,技术难度较小的条件下实现同样的定位功能,定位精度在95%以上,可以较好的满足各类仪器在煤矿、矿产开采,地质资源勘探等场景下的应用,进而带动相关产业的经济发展;通过设置gis显示系统显示,可直观且明显的得到定位点的推断点,由此可根据点进行后续操作,方便后台管理人员进行操作管理,为其带来了便利。
33.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
34.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1