一种无人机差分起降引导系统及其控制方法与流程
本发明涉及无人机,特别是涉及一种无人机差分起降引导系统及其控制方法。
背景技术:
1、近年来,大中型无人机以其低成本、高效能,在执行特殊任务中发挥越来越重要的作用,应用前景广阔。相较于有人机,由于存在上百毫秒的链路延时,飞行员无法对无人机进行实时操控,主要由飞管计算机对无人机的起降过程进行自主控制。而要想实现安全的自主起降,必须依赖于稳定可靠的起降引导技术。
2、受制于平台搭载能力以及系统成本等限制,现有的大中型无人机通常直接采用差分卫星定位技术实现高精度起降引导。目前,广泛使用的基于数传电台的无人机差分起降引导系统的组成和工作原理如图1所示。它由地面差分卫星基准站设备和机载差分卫星设备组成;其中地面差分卫星基准站设备主要包括:地面差分卫星基准接收机、地面卫星测绘天线、地面数传发射电台、地面电台发射天线以及设备之间的连接电缆;机载差分卫星导航设备主要包括:机载差分卫星接收机、机载卫星航空天线、机载数传接收电台、机载电台接收天线以及设备之间的连接电缆。地面差分卫星基准接收机已事先测知地面卫星测绘天线精准位置,并实时观测和记录导航卫星的原始数据定位信息,通过对两者信息进行计算处理生成差分修正信息报文,周期性发送给地面数传发射电台。地面数传发射电台与机载数传接收电台组成差分卫星无线数据链,机载数传接收电台将接收到的地面数传发射电台输出的差分修正信息报文周期性地发送给机载差分卫星设备,从而实现定位。
3、但是,上述系统主要依赖数传电台进行差分修正信息的传输,而这些地面数传发射电台、机载数传接收电台基本上是普通的全向电台,无人机从不同方位向着陆机场进行近进的时候,均是被动地接收地面数传发射电台向空间中广播的差分修正信息,无定向跟踪能力。由于数传电台功率小、作用距离短、易受遮挡、易受干扰,一旦面临复杂的电磁环境(存在干扰)及地理环境(通视环境较差),无人机就难以保持与地面数传发射电台之间的稳定跟踪和差分修正信息接收,机载差分卫星导航设备容易丢失差分修正信息而导致定位精度降级,存在较大的着陆安全隐患。
4、因此,如何解决基于数传电台的差分起降引导技术的上述问题,是本领域技术人员亟待解决的技术问题。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种无人机差分起降引导系统及其控制方法,可以实现无人机的多余度长基线差分引导,提高差分修正信息传输的稳定性,保证无人机的起降安全性。其具体方案如下:
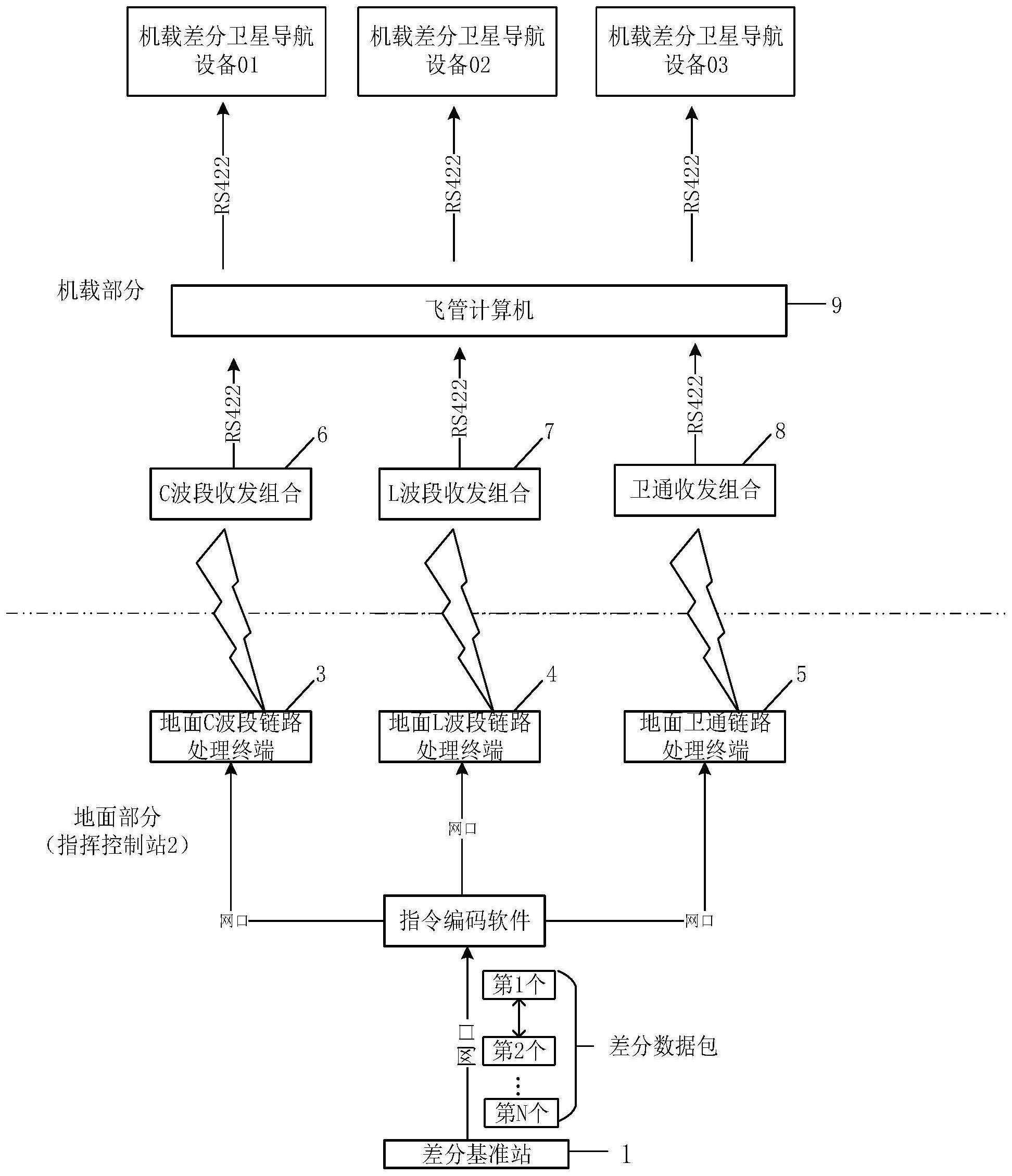
2、一种无人机差分起降引导系统,包括:地面设备和机载设备;所述地面设备包括差分基准站、指挥控制站、地面c波段链路处理终端、地面l波段链路处理终端和地面卫通链路处理终端;所述机载设备包括c波段收发组合、l波段收发组合、卫通收发组合、飞管计算机和机载差分卫星导航设备;其中,
3、所述差分基准站,用于将rtcm差分报文通过udp网络发送至所述指挥控制站;
4、所述指挥控制站,用于将获取到的所述rtcm差分报文按照设定的链路数据帧格式分发至所述地面c波段链路处理终端、所述地面l波段链路处理终端和所述地面卫通链路处理终端;
5、所述c波段收发组合、所述l波段收发组合、所述卫通收发组合,用于实时接收来自地面的上行链路数据并传输至所述飞管计算机;
6、所述飞管计算机,用于对接收的所述上行链路数据进行监测和处理,将满足设定条件的差分修正信息转发至所述机载差分卫星导航设备;
7、所述机载差分卫星导航设备,用于实时利用所述差分修正信息进行伪距差分和实时动态载波相位差分。
8、优选地,在本发明实施例提供的上述无人机差分起降引导系统中,所述地面c波段链路处理终端与所述c波段收发组合、所述地面l波段链路处理终端与所述l波段收发组合共同构成双余度视距链路;所述双余度视距链路的主链路为配备c定向天线的c链路,备份链路为配备l全向天线的l链路;
9、所述地面卫通链路处理终端与所述卫通收发组合构成单余度卫通链路;所述单余度卫通链路使用ku频段通信卫星进行信号中继。
10、优选地,在本发明实施例提供的上述无人机差分起降引导系统中,所述差分基准站集成在所述指挥控制站中;
11、所述差分基准站包括卫星导航天线、基准差分卫星导航接收机和ups电源。
12、优选地,在本发明实施例提供的上述无人机差分起降引导系统中,所述差分基准站,还用于按照每包设定字节数的数据长度对所述基准差分卫星导航接收机输出的完整rtcm差分报文进行实时分包处理,不足所述设定字节数的部分用0补全;在分包处理后,对各个差分修正信息帧添加差分帧序号、差分帧总帧数和差分帧计数器。
13、优选地,在本发明实施例提供的上述无人机差分起降引导系统中,所述指挥控制站,具体用于获取分包后的所述rtcm差分报文,将每个差分数据包打上帧识别码后分发至所述地面c波段链路处理终端、所述地面l波段链路处理终端、所述地面卫通链路处理终端。
14、优选地,在本发明实施例提供的上述无人机差分起降引导系统中,所述飞管计算机,具体用于判断当前拍差分帧计数器值是否与前一拍差分帧计数器值相等;若不相等,则判断差分帧序号是否等于1;若是,则将差分修正信息发送允许标志设置为1,并将差分修正信息转发至所述机载差分卫星导航设备;若否,则判断当前拍差分帧计数器值与前一拍差分帧计数器值是否连续;若连续且差分修正信息发送允许标志为1,则将差分修正信息转发至所述机载差分卫星导航设备;若不连续,则将差分修正信息发送允许标志设置为0。
15、优选地,在本发明实施例提供的上述无人机差分起降引导系统中,所述c波段收发组合、所述l波段收发组合、所述卫通收发组合,具体用于将所述上行链路数据通过独立的rs422串口传输至所述飞管计算机。
16、本发明实施例还提供了一种本发明实施例提供的上述无人机差分起降引导系统的控制方法,包括:
17、差分基准站将rtcm差分报文通过udp网络发送至指挥控制站;
18、指挥控制站将获取到的所述rtcm差分报文按照设定的链路数据帧格式同时分发至地面c波段链路处理终端、地面l波段链路处理终端、地面卫通链路处理终端;
19、c波段收发组合、l波段收发组合、卫通收发组合实时接收来自地面的上行链路数据并传输至飞管计算机;
20、飞管计算机对所述上行链路数据进行状态监测,并对差分数据包的完好性进行监控,将满足设定条件的差分修正信息转发至机载差分卫星导航设备;
21、所述机载差分卫星导航设备实时利用所述差分修正信息进行伪距差分和实时动态载波相位差分。
22、优选地,在本发明实施例提供的上述无人机差分起降引导系统的控制方法中,差分基准站将rtcm差分报文通过udp网络发送至指挥控制站,具体包括:
23、差分基准站按照每包设定字节数的数据长度对所述基准差分卫星导航接收机输出的完整rtcm差分报文进行实时分包处理,不足所述设定字节数的部分用0补全;在分包处理后,对各个差分修正信息帧添加差分帧序号、差分帧总帧数和差分帧计数器;
24、差分基准站将分包后的rtcm差分报文通过udp网络发送至指挥控制站。
25、优选地,在本发明实施例提供的上述无人机差分起降引导系统的控制方法中,飞管计算机将满足设定条件的差分修正信息转发至机载差分卫星导航设备,具体包括:
26、飞管计算机判断当前拍差分帧计数器值是否与前一拍差分帧计数器值相等;
27、若不相等,则判断差分帧序号是否等于1;
28、若是,则将差分修正信息发送允许标志设置为1,并将差分修正信息转发至所述机载差分卫星导航设备;若否,则判断当前拍差分帧计数器值与前一拍差分帧计数器值是否连续;
29、若连续且差分修正信息发送允许标志为1,则将差分修正信息转发至所述机载差分卫星导航设备;若不连续,则将差分修正信息发送允许标志设置为0。
30、从上述技术方案可以看出,本发明所提供的一种无人机差分起降引导系统,包括:地面设备和机载设备;地面设备包括差分基准站、指挥控制站、地面c波段链路处理终端、地面l波段链路处理终端和地面卫通链路处理终端;机载设备包括c波段收发组合、l波段收发组合、卫通收发组合、飞管计算机和机载差分卫星导航设备;其中,差分基准站,用于将rtcm差分报文通过udp网络发送至指挥控制站;指挥控制站,用于将获取到的rtcm差分报文按照设定的链路数据帧格式同时分发至地面c波段链路处理终端、地面l波段链路处理终端和地面卫通链路处理终端;c波段收发组合、l波段收发组合、卫通收发组合,用于实时接收来自地面的上行链路数据并传输至飞管计算机;飞管计算机,用于对接收的上行链路数据进行监测和处理,将满足设定条件的差分修正信息转发至机载差分卫星导航设备;机载差分卫星导航设备,用于实时利用差分修正信息进行伪距差分和实时动态载波相位差分。
31、本发明提供的上述无人机差分起降引导系统,通过差分基准站、指挥控制站、地面c波段链路处理终端、地面l波段链路处理终端、地面卫通链路处理终端、c波段收发组合、l波段收发组合、卫通收发组合、飞管计算机和机载差分卫星导航设备的硬件架构,可以实现无人机的多余度长基线差分引导,提高差分修正信息传输的稳定性,保证无人机的起降安全性,很好地解决目前广泛使用的大中型无人机差分起降引导系统存在的数传电台功率小、作用距离短、易受遮挡、易受干扰等问题。
32、此外,本发明还针对无人机差分起降引导系统提供了相应的控制方法,进一步使得上述系统更具有实用性,该方法具有相应的优点。
- 还没有人留言评论。精彩留言会获得点赞!