机器人喷涂稳定性的监测方法、装置、设备以及存储介质与流程
本发明涉及设备性能监测领域,尤其涉及机器人喷涂稳定性的监测方法、装置、设备以及存储介质。
背景技术:
1、在涂装车间,为了保证油漆喷涂的质量,多选择使用喷涂机器人来执行喷漆操作。机器人喷涂质量相对于人工喷涂质量较为稳定,但是也有其弊端,比如设备磨损、老化后,喷涂机器人的出漆大小与设定不符,或者成型环堵塞后,喷涂机器人漆雾集中喷涂形状某一侧,从而导致喷漆色差、针孔、流挂等异常,因此,喷涂机器人喷涂质量的稳定性需要定期进行监测。针对上述问题,亟需一种机器人喷涂稳定性的监测方法,能够直观、精确地监测机器人的喷涂稳定性状态并进行校正。
技术实现思路
1、本发明提供了一种机器人喷涂稳定性的监测方法、装置、设备以及存储介质,以解决能够直观、精确地监测机器人的喷涂稳定性状态并进行校正的技术问题。
2、为了解决上述技术问题,本发明实施例提供了一种机器人喷涂稳定性的监测方法,包括如下步骤:
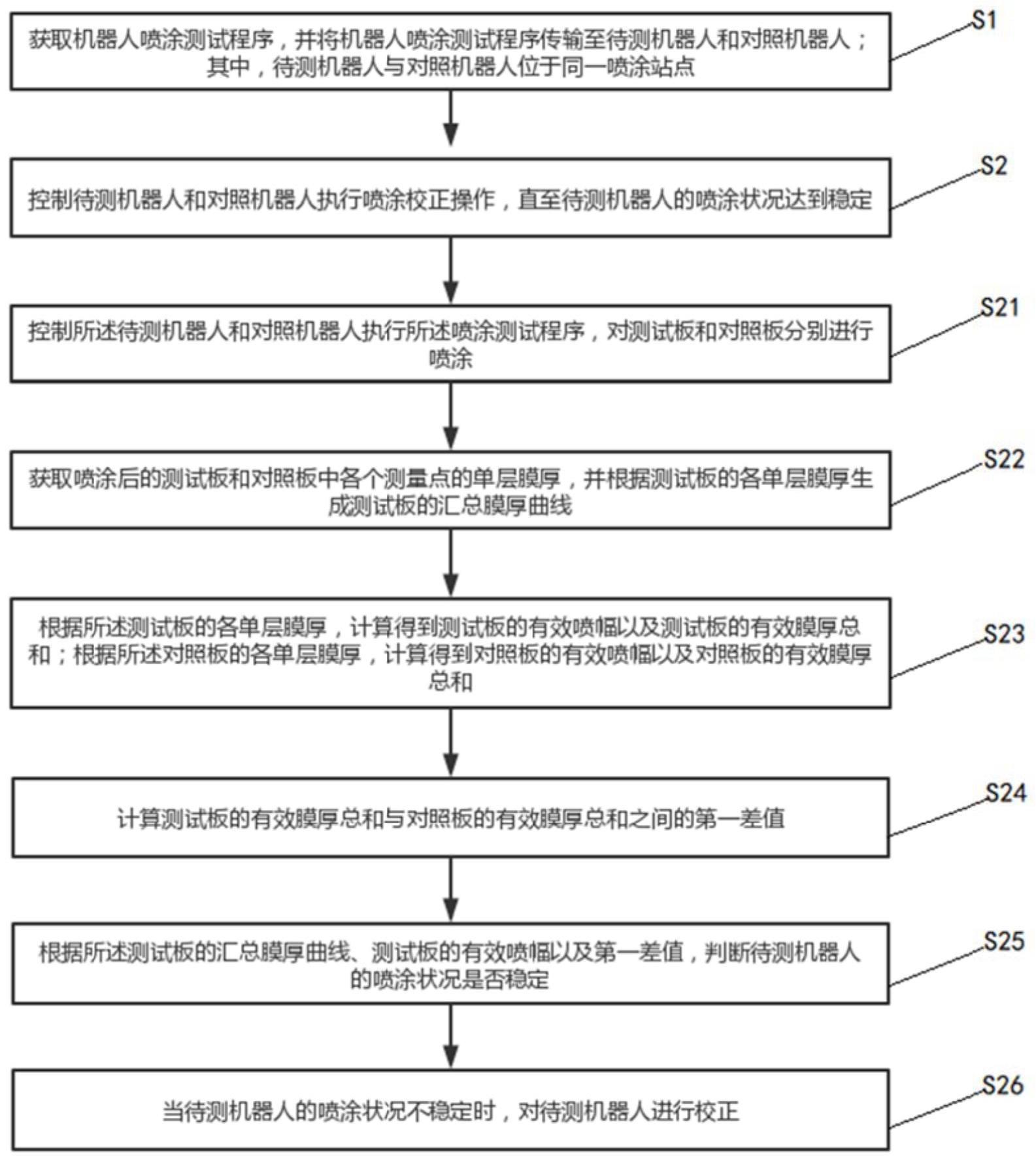
3、获取机器人喷涂测试程序,并将机器人喷涂测试程序传输至待测机器人和对照机器人;其中,待测机器人与对照机器人位于同一喷涂站点;
4、控制待测机器人和对照机器人执行喷涂校正操作,直至待测机器人的喷涂状况达到稳定;其中,所述喷涂校正操作包括:
5、控制所述待测机器人和对照机器人执行所述喷涂测试程序,对测试板和对照板分别进行喷涂;
6、获取喷涂后的测试板和对照板中各个测量点的单层膜厚,并根据测试板的各单层膜厚生成测试板的汇总膜厚曲线;
7、根据所述测试板的各单层膜厚,计算得到测试板的有效喷幅以及测试板的有效膜厚总和;根据所述对照板的各单层膜厚,计算得到对照板的有效喷幅以及对照板的有效膜厚总和;
8、计算测试板的有效膜厚总和与对照板的有效膜厚总和之间的第一差值;
9、根据所述测试板的汇总膜厚曲线、测试板的有效喷幅以及第一差值,判断待测机器人的喷涂状况是否稳定;
10、当待测机器人的喷涂状况不稳定时,对待测机器人进行校正。
11、作为优选方案,所述机器人喷涂测试程序中设置有喷涂参数;所述喷涂参数包括以下任意一项或其组合:
12、机器人的喷涂道数、喷涂枪距、喷枪移动速度、喷涂流量、旋杯转速、喷涂成型空气压和静电高压。
13、作为优选方案,所述测试板和对照板为经过电泳处理的冷轧钢板。
14、作为优选方案,所述获取喷涂后的测试板和对照板中各个测量点的单层膜厚,包括:
15、获取喷涂后的测试板和对照板中各个测量点的膜厚;
16、将所述各测量点的膜厚减去对应的电泳膜厚,得到测试板和对照板中各个测量点的单层膜厚。
17、作为优选方案,所述根据所述测试板的各单层膜厚,计算得到测试板的有效喷幅,包括:
18、获取测试板中单层膜厚大于预设膜厚的若干连续测量点;
19、计算所述测试板的连续测量点中首尾两端测量点的第一间距,将所述第一间距作为测试板的有效喷幅;
20、所述根据所述对照板的各单层膜厚,计算得到对照板的有效喷幅,包括:
21、获取对照板中单层膜厚大于预设膜厚的若干连续测量点;
22、计算所述对照板的连续测量点中首尾两端测量点的第二间距,将所述第二间距作为对照板的有效喷幅。
23、作为优选方案,所述根据所述测试板的各单层膜厚,计算得到测试板的有效膜厚总和,包括:
24、将所述测试板中位于有效膜厚内的测量点的单层膜厚相加,得到测试板的有效膜厚总和;
25、所述根据所述对照板的各单层膜厚,计算得到对照板的有效膜厚总和,包括:
26、将所述对照板中位于有效膜厚内的测量点的单层膜厚相加,得到对照板的有效膜厚总和。
27、作为优选方案,所述根据所述测试板的汇总膜厚曲线、测试板的有效喷幅以及第一差值,判断待测机器人的喷涂状况是否稳定,包括:
28、当出现以下任一状况时,判定机器人的喷涂状况不稳定:
29、汇总膜厚曲线中出现倾斜的单侧峰、汇总膜厚曲线中出现局部凸起的尖峰时、机器人中涂喷涂和色漆喷涂的有效喷幅低于第一有效喷幅阈值、机器人清漆喷涂的有效喷幅低于第二有效喷幅阈值、机器人清漆喷涂的有效喷幅高于第三有效喷幅阈值、以及第一差值大于预设的差值阈值;其中,第三有效喷幅阈值大于第二有效喷幅阈值。
30、在上述实施例的基础上,本发明另一实施例提供了一种机器人喷涂稳定性的监测装置,包括:机器人喷涂测试程序获取模块和机器人喷涂校正模块;
31、所述机器人喷涂校正模块包括:机器人喷涂子模块、汇总膜厚曲线生成子模块、有效喷幅与有效膜厚总和计算子模块、第一差值计算子模块、机器人喷涂稳定性判断子模块和机器人校正子模块;
32、所述机器人喷涂测试程序获取模块,用于获取机器人喷涂测试程序,并将机器人喷涂测试程序传输至待测机器人和对照机器人;其中,待测机器人与对照机器人位于同一喷涂站点;
33、所述机器人喷涂校正模块,用于控制待测机器人和对照机器人执行喷涂校正操作,直至待测机器人的喷涂状况达到稳定;
34、所述机器人喷涂子模块,用于控制所述待测机器人和对照机器人执行所述喷涂测试程序,对测试板和对照板分别进行喷涂;
35、所述汇总膜厚曲线生成子模块,用于获取喷涂后的测试板和对照板中各个测量点的单层膜厚,并根据测试板的各单层膜厚生成测试板的汇总膜厚曲线,并将生成的测试板的汇总膜厚曲线传输至机器人喷涂稳定性判断子模块;
36、所述有效喷幅与有效膜厚总和计算子模块,用于根据所述测试板的各单层膜厚,计算得到测试板的有效喷幅以及测试板的有效膜厚总和;根据所述对照板的各单层膜厚,计算得到对照板的有效喷幅以及对照板的有效膜厚总和,并将计算得到的测试板和对照板的有效喷幅与有效膜厚总和传输至第一差值计算子模块,将计算得到的测试板的有效喷幅传输至机器人喷涂稳定性判断子模块;
37、所述第一差值计算子模块,用于计算测试板的有效膜厚总和与对照板的有效膜厚总和之间的第一差值,并将计算得到的第一差值传输至机器人喷涂稳定性判断子模块;
38、所述机器人喷涂稳定性判断子模块,用于根据所述测试板的汇总膜厚曲线、测试板的有效喷幅以及第一差值,判断待测机器人的喷涂状况是否稳定,并将机器人的喷涂状况传输至机器人校正子模块;
39、所述机器人校正子模块,用于当待测机器人的喷涂状况不稳定时,对待测机器人进行校正。
40、在上述实施例的基础上,本发明又一实施例提供了一种机器人喷涂稳定性的监测设备,所述设备包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器执行所述计算机程序时实现上述发明实施例所述的机器人喷涂稳定性的监测方法。
41、在上述实施例的基础上,本发明又一实施例提供了一种存储介质,所述存储介质包括存储的计算机程序,其中,在所述计算机程序运行时控制所述计算机可读存储介质所在设备执行上述发明实施例所述的机器人喷涂稳定性的监测方法。
42、相比于现有技术,本发明实施例具有如下有益效果:
43、本发明实施例通过设置测试机器人组和对照机器人组,并控制测试机器人和对照机器人都执行相同的测试喷涂程序,来分别对相同的测试板和对照板进行喷涂,进而得到测试机器人的测试板和对照机器人的对照板的单层膜厚,通过最终的喷涂成品来评价测试机器人整体喷涂的稳定性,避免单个参数稳定不能全面评估机器人稳定性的问题。进一步的,通过测试板和对照板的有效喷幅大小、有效膜厚加和以及汇总膜厚曲线的对比分析,建立了同一个机器人不同时间、同一时间不同机器人的量化对比方案,能够直观、精确地监测到机器人的喷涂稳定性状况,方便对其进行校正。
- 还没有人留言评论。精彩留言会获得点赞!