一种单光源360度无死角XRAY检测方法与流程
一种单光源360度无死角xray检测方法
技术领域
1.本发明涉及异物检测设备技术领域,具体为一种单光源360度无死角xray检测方法。
背景技术:
2.现有技术分两种,第一种是单光源技术、第二种是多光源技术。每种技术都是利用输送机试检测物体匀速通过光源,然后成像、最后异物检测,单光源技术又分为顶部照射、底部照射、水平照射;多光源技术主要有分光束照射、双光源照射,目前的单光源技术、多光源技术对类似于上图形状的罐体子内的异物检测效果不佳,顶部和底部照射不足:射线需要穿透厚厚的罐底及罐盖,对罐底、罐顶区域难以检测;水平照射不足:罐底边缘一圈的异物难以检测,内壁部分异物也会难以检测,为此我们提出了一种单光源360度无死角xray检测方法。
技术实现要素:
3.(一)解决的技术问题
4.针对现有技术的不足,本发明提供了一种单光源360度无死角xray检测方法,解决了上述的问题。
5.(二)技术方案
6.为实现上述所述目的,本发明提供如下技术方案:一种单光源360度无死角xray检测方法,包括由射线发射源、射线接收源、机械手系统和输送机系统组成的检测设备,包括以下步骤:
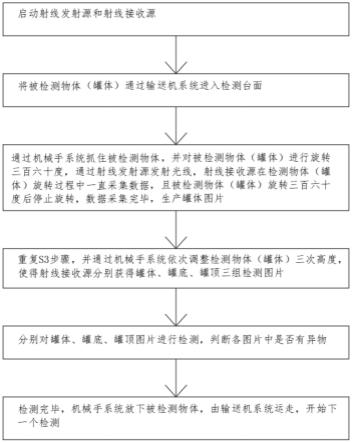
7.s1:启动射线发射源和射线接收源;
8.s2:将被检测物体(罐体)通过输送机系统进入检测台面;
9.s3:通过机械手系统抓住被检测物体,并对被检测物体(罐体)进行旋转三百六十度,通过射线发射源发射光线,射线接收源在检测物体(罐体)旋转过程中一直采集数据,且被检测物体(罐体)旋转三百六十度后停止旋转,数据采集完毕,生成罐体图片;
10.s4:重复s3步骤,并通过机械手系统依次调整检测物体(罐体)三次高度,使得射线接收源分别获得罐体、罐底、罐顶三组检测图片;
11.s5:分别对罐体、罐底、罐顶图片进行检测,判断各图片中是否有异物;
12.s6:检测完毕,机械手系统放下被检测物体,由输送机系统运走,开始下一个检测。
13.优选的,所述射线发射源采用xray检测光源,且射线发射源所发射的射线范围为顶部水平、底部向下倾斜。
14.优选的,所述s3中射线接收源采集数据生成图片包括以下步骤:
15.s31:尺寸缩减,是对采集到的图像进行适当裁剪后缩减图像的分辨率,减少后续算法处理的时间;
16.s32:图像去噪处理,采用中值滤波算法对图像进行去噪,保留图像边缘的锐度和
图像细节;
17.s33:图像增强处理,采用灰度直方图均衡化处理,增强图像的对比度;
18.s34:边缘检测处理,采用canny边缘检测算法进行边缘检测,对于边界上的断裂点采用图像形态学闭操作,得到罐体区域的完整边界。
19.优选的,所述s4中通过机械手系统依次调整检测物体(罐体)三次高度,使得射线接收源分别获得罐体、罐底、罐顶三组检测图片,包括以下步骤:
20.s41:机械手系统抓住被检测物体,使射线发射源顶部、射线接收源顶部和被检测物体顶部平行,然后按一定速度旋转,旋转过程中,射线接收源一直采集数据,旋转三百六十度后度后停止旋转,数据采集完毕,生成罐体图片,这个过程中,被检测物体所有的罐体部分都有被检测到;
21.s42:机械手系统抓住被检测物体,使射线发射源的底部射线通过被检测物体底部,然后按一定速度旋转,旋转过程中,射线接收源一直采集数据,旋转三百六十度后度后停止旋转,数据采集完毕,生成罐体图片,这个过程中,被检测物体所有的罐底部分都有被检测到;
22.s43:机械手系统抓住被检测物体,使射线发射源的底部射线通过被检测物体顶部,然后按一定速度旋转,旋转过程中,射线接收源一直采集数据,旋转三百六十度后度后停止旋转,数据采集完毕,生成罐体图片,这个过程中,被检测物体所有的罐顶部分都有被检测到。
23.优选的,所述s5中对异物进行检测判断是通过对所得图片像素的几何特征、灰度特征进行分析,若同时满足几何特征呈现不规则和灰度值与设定值相差过大两种条件则判定为异物。
24.优选的,所述几何特征包括长条状和边缘凹凸不平的点状,异物的灰度值与设定值相差大于五为相差过大。
25.优选的,所述s5中判断各图片中是否有异物包括以下步骤:
26.s51:自适应阈值分割,采用ostu法求出最佳阈值,并对图像进行二值化操作,将整幅图像转变为黑白图像;
27.s52:图像形态学处理,对黑白图像进行形态学腐蚀操作,滤除噪点,再采用形态学闭操作去掉目标内的孔洞;
28.s53:连通域判定,对连通域面积进行判定,小于阈值则剔除,大于阈值则选中为候选异物。
29.优选的,所述s6中检测完毕后可对异物进行判别分类,包括以下步骤:
30.s61:可在s5中检测异物前可先提取出候选异物,并对提取出的候选异物进行人工分类,生成训练集和测试集;
31.s62:对生成的训练集中的样本进行特征提取,包括颜色特征、形状特征、ostu最佳阈值特征和hog特征;
32.s63:训练两个随机森林分类器分别实现候选异物的分类和匹配任务。。
33.(三)有益效果
34.与现有技术相比,本发明提供了一种单光源360度无死角xray检测方法,具备以下
35.有益效果:
36.1、该单光源360度无死角xray检测方法,通过分别对罐体、罐底和罐顶进行三百六十度x射线采像,比通过三组数据进行对比,解决了顶部和底部照射不足,射线需要穿透厚厚的罐底及罐盖,对罐底、罐顶区域难以检测;水平照射不足,罐底边缘一圈的异物难以检测,内壁部分异物也会难以检测的问题,实现了自动化异物检测,与传统单光源检测相比较,具有更高的检测精度和检测效率,对于信息化和工业化的融合,实现检测的智能化、自动化,使得异物检测的结果更加精准,可以解决目前行业内针对罐状物体异物难以检测的问题。
附图说明
37.图1为本发明方法流程示意图;
38.图2为本发明检测设备示意图;
39.图3为本发明罐体检测示意图;
40.图4为本发明罐底检测示意图;
41.图5为本发明罐顶检测示意图。
42.图中:1、射线发射源;2、射线接收源;3、机械手系统;4、输送机系统。
具体实施方式
43.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
44.请参阅图1-5,一种单光源360度无死角xray检测方法,包括由射线发射源1、射线接收源2、机械手系统3和输送机系统4组成的检测设备,包括以下步骤:
45.s1:启动射线发射源1和射线接收源2;
46.s2:将被检测物体(罐体)通过输送机系统4进入检测台面;
47.s3:通过机械手系统3抓住被检测物体,并对被检测物体(罐体)进行旋转三百六十度,通过射线发射源1发射光线,射线接收源2在检测物体(罐体)旋转过程中一直采集数据,且被检测物体(罐体)旋转三百六十度后停止旋转,数据采集完毕,生成罐体图片;
48.s4:重复s3步骤,并通过机械手系统3依次调整检测物体(罐体)三次高度,使得射线接收源2分别获得罐体、罐底、罐顶三组检测图片;
49.s5:分别对罐体、罐底、罐顶图片进行检测,判断各图片中是否有异物;
50.s6:检测完毕,机械手系统3放下被检测物体,由输送机系统4运走,开始下一个检测。
51.该单光源360度无死角xray检测方法,通过分别对罐体、罐底和罐顶进行三百六十度x射线采像,比通过三组数据进行对比,解决了顶部和底部照射不足,射线需要穿透厚厚的罐底及罐盖,对罐底、罐顶区域难以检测;水平照射不足,罐底边缘一圈的异物难以检测,内壁部分异物也会难以检测的问题,实现了自动化异物检测,与传统单光源检测相比较,具有更高的检测精度和检测效率,对于信息化和工业化的融合,实现检测的智能化、自动化,使得异物检测的结果更加精准。
52.射线发射源1采用xray检测光源,且射线发射源1所发射的射线范围为顶部水平、底部向下倾斜。
53.s3中射线接收源2采集数据生成图片包括以下步骤:
54.s31:尺寸缩减,是对采集到的图像进行适当裁剪后缩减图像的分辨率,减少后续算法处理的时间;
55.s32:图像去噪处理,采用中值滤波算法对图像进行去噪,保留图像边缘的锐度和图像细节;
56.s33:图像增强处理,采用灰度直方图均衡化处理,增强图像的对比度;
57.s34:边缘检测处理,采用canny边缘检测算法进行边缘检测,对于边界上的断裂点采用图像形态学闭操作,得到罐体区域的完整边界。
58.canny边缘检测算法处理流程如下:(1)使用高斯滤波器对输入图像进行去噪;
59.(2)计算图像中每个像素点的梯度强度和方向;
60.(3)应用非极大值抑制,以消除边缘检测带来的杂散响应;
61.(4)应用双阈值检测来确定真实的和潜在的边缘;
62.(5)通过抑制孤立的弱边缘最终完成边缘检测。
63.s4中通过机械手系统3依次调整检测物体(罐体)三次高度,使得射线接收源2分别获得罐体、罐底、罐顶三组检测图片,包括以下步骤:
64.s41:机械手系统3抓住被检测物体,使射线发射源1顶部、射线接收源2顶部和被检测物体顶部平行,然后按一定速度旋转,旋转过程中,射线接收源2一直采集数据,旋转三百六十度后度后停止旋转,数据采集完毕,生成罐体图片,这个过程中,被检测物体所有的罐体部分都有被检测到;
65.s42:机械手系统3抓住被检测物体,使射线发射源1的底部射线通过被检测物体底部,然后按一定速度旋转,旋转过程中,射线接收源2一直采集数据,旋转三百六十度后度后停止旋转,数据采集完毕,生成罐体图片,这个过程中,被检测物体所有的罐底部分都有被检测到;
66.s43:机械手系统3抓住被检测物体,使射线发射源1的底部射线通过被检测物体顶部,然后按一定速度旋转,旋转过程中,射线接收源2一直采集数据,旋转三百六十度后度后停止旋转,数据采集完毕,生成罐体图片,这个过程中,被检测物体所有的罐顶部分都有被检测到。
67.s5中对异物进行检测判断是通过对所得图片像素的几何特征、灰度特征进行分析,若同时满足几何特征呈现不规则和灰度值与设定值相差过大两种条件则判定为异物。
68.几何特征包括长条状和边缘凹凸不平的点状,异物的灰度值与设定值相差大于五为相差过大。
69.s5中判断各图片中是否有异物包括以下步骤:
70.s51:自适应阈值分割,采用ostu法求出最佳阈值,并对图像进行二值化操作,将整幅图像转变为黑白图像;
71.s52:图像形态学处理,对黑白图像进行形态学腐蚀操作,滤除噪点,再采用形态学闭操作去掉目标内的孔洞;
72.s53:连通域判定,对连通域面积进行判定,小于阈值则剔除,大于阈值则选中为候
选异物。
73.ostu算法,又被称为最大类间方差法,以最大类间方差作为判定图像分割性能好坏的评估标准,方差越大,说明图像背景和前景的差别越大,方差越小,则图像背景和前景的差别越小。otsu算法的思想就是利用最大类间方差来得出最佳全局阈值,进而将背景和前景分割开;先计算图像的总平均灰度;在对阈值t进行遍历,计算方差,最大的类间方差对应的阈值t即为所求。
74.s6中检测完毕后可对异物进行判别分类,包括以下步骤:
75.s61:可在s5中检测异物前可先提取出候选异物,并对提取出的候选异物进行人工分类,生成训练集和测试集;
76.s62:对生成的训练集中的样本进行特征提取,包括颜色特征、形状特征、ostu最佳阈值特征和hog特征;
77.s63:训练两个随机森林分类器分别实现候选异物的分类和匹配任务。
78.随机森林分类器是一种算法,常用于分类问题,在分类问题中,输入到分类器中的数据叫做特征,根据下列算法而建造每棵树:
79.用n来表示训练用例(样本)的个数,m表示特征数目。
80.输入特征数目m,用于确定决策树上一个节点的决策结果;其中m应远小于m。
81.从n个训练用例(样本)中以有放回抽样的方式,取样n次,形成一个训练集(即bootstrap取样),并用未抽到的用例(样本)作预测,评估其误差。
82.对于每一个节点,随机选择m个特征,决策树上每个节点的决定都是基于这些特征确定的。根据这m个特征,计算其最佳的分裂方式。
83.每棵树都会完整成长而不会剪枝,这有可能在建完一棵正常树状分类器后会被采用)。
84.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1