表面缺陷检测系统及其检测方法、装置、设备、存储介质与流程
本公开涉及机器视觉检测,尤其涉及一种表面缺陷检测系统及其检测方法、装置、设备及存储介质。
背景技术:
1、目前,基于机器视觉的自动化检测系统蓬勃发展,相对于人工视觉检测的低精度、低重复性、高成本以及不可追溯等缺点,机器视觉检测系统具有更大的发展潜力,未来将逐步替代人工检测。
2、在现有技术中,物体表面的缺陷检测设备通常使用二维检测的方式,被测物体只能显示出针对单一入射光对比度的差异,难以凸显出轻微的表面凹陷等缺陷,容易造成漏检,从而影响检测设备的性能。
技术实现思路
1、本公开提供了一种表面缺陷检测系统及其检测方法、装置、设备、存储介质,以至少解决现有技术中存在的以上技术问题。
2、根据本公开的第一方面,提供了一种表面缺陷检测系统,所述系统包括:相机组件、支撑架、多角度光源与主机,其中,
3、所述多角度光源位于所述相机组件与待测物体之间,所述多角度光源为多层不同直径的环形照明单元叠加而成,其中,每个环形照明单元由多个照明子单元拼接而成,用于为待测物体提供不同角度光源;
4、所述相机组件与所述支撑架连接,用于在不同照明子单元的照射条件下,拍摄所述待测物体得到多个待测图像,并发送所述多个待测图像至所述主机;
5、所述主机,用于将所述多个待测图像合成目标图像。
6、在一可实施方式中,所述多角度光源由高角度环形照明单元、中角度环形照明单元以及低角度环形照明单元叠加而成;其中,
7、所述中角度环形照明单元位于所述高角度环形照明单元和所述低角度环形照明单元之间,所述低角度环形照明单元靠近所述待测物体;
8、所述高角度环形照明单元的直径小于所述中角度环形照明单元的直径,所述中角度环形照明单元的直径小于所述低角度环形照明单元的直径。
9、在一可实施方式中,所述高角度环形照明单元、所述中角度环形照明单元以及所述低角度环形照明单元分别由四个相同的照明子单元拼接而成。
10、在一可实施方式中,所述高角度环形照明单元包括高角度第一照明子单元、高角度第二照明子单元、高角度第三照明子单元以及高角度第四照明子单元拼接而成;
11、所述中角度环形照明单元包括中角度第一照明子单元、中角度第二照明子单元、中角度第三照明子单元以及中角度第四照明子单元拼接而成;
12、所述低角度环形照明单元包括低角度第一照明子单元、低角度第二照明子单元、低角度第三照明子单元以及低角度第四照明子单元拼接而成;
13、其中,所述高角度第一照明子单元、所述中角度第一照明子单元以及所述低角度第一照明子单元位于第一正交分区;所述高角度第二照明子单元、所述中角度第二照明子单元以及所述低角度第二照明子单元位于第二正交分区;所述高角度第三照明子单元、所述中角度第三照明子单元以及所述低角度第三照明子单元位于第三正交分区;所述高角度第四照明子单元、所述中角度第四照明子单元以及所述低角度第四照明子单元位于第四正交分区。
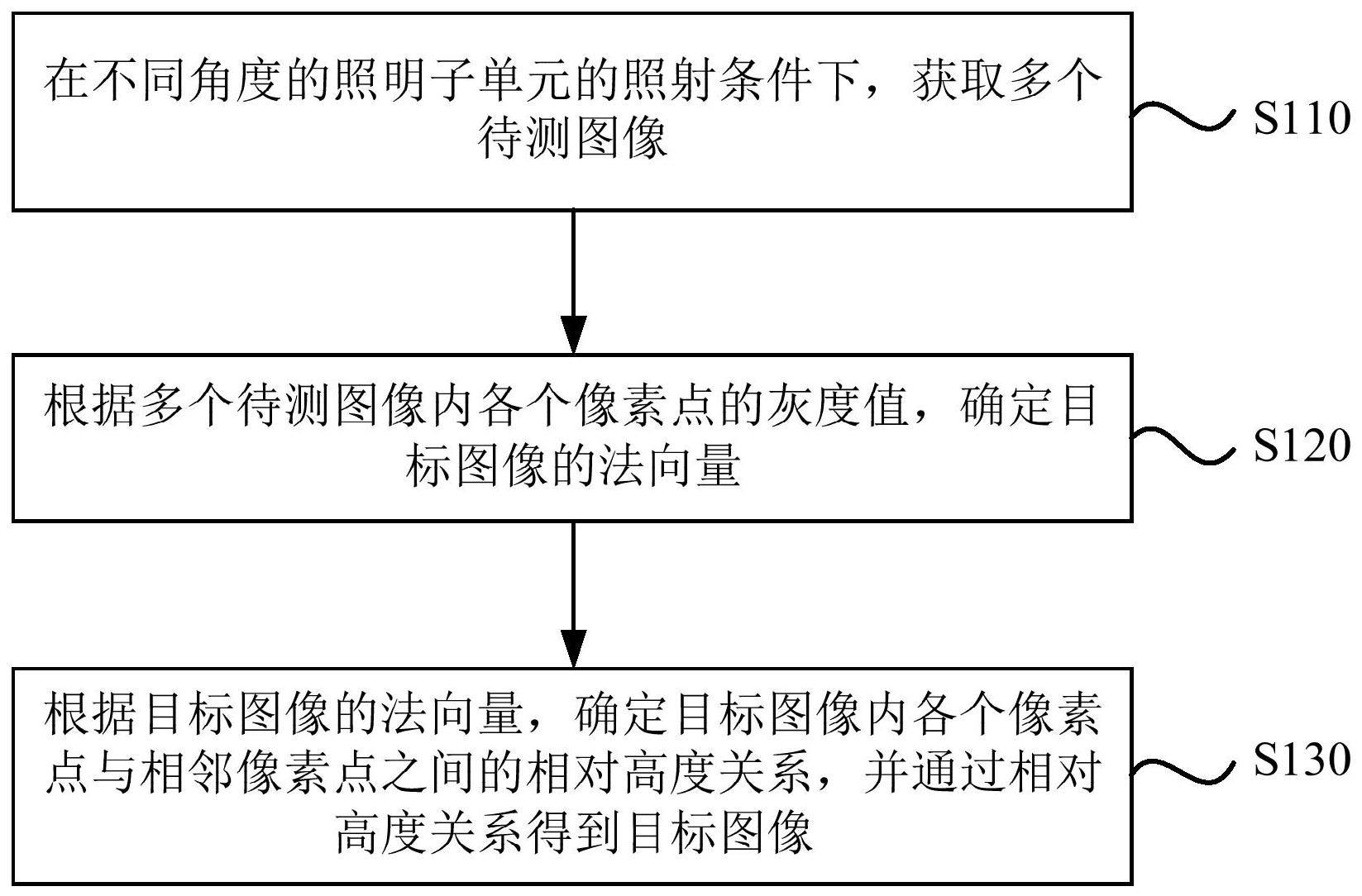
14、根据本公开的第二方面,提供了一种表面缺陷检测系统的检测方法,基于表面缺陷检测系统,包括:
15、在不同角度的照明子单元的照射条件下,获取多个待测图像;
16、根据所述多个待测图像内各个像素点的灰度值,确定目标图像的法向量;
17、根据所述目标图像的法向量,确定所述目标图像内各个像素点与相邻像素点之间的相对高度关系,并通过所述相对高度关系得到目标图像。
18、在一可实施方式中,所述在不同角度的照明子单元的照射条件下,获取多个待测图像,包括:
19、分别在四个正交分区内选取照明子单元,得到四个目标照明子单元,其中,所述四个目标照明子单元属于不同角度环形照明单元;
20、在不同目标照明子单元的照射条件下,获取多个待测图像。
21、在一可实施方式中,所述根据所述多个待测图像内各个像素点的灰度值,确定目标图像的法向量,包括:
22、根据朗伯反射原理以及所述多个待测图像内各个像素点的灰度值,确定所述目标图像内各个像素点的漫反射率与法向量的乘积;
23、通过归一化分离所述目标图像内各个像素点的漫反射率与法向量的乘积,得到所述目标图像各个像素点的法向量。
24、在一可实施方式中,所述根据朗伯反射原理以及所述多个待测图像内各个像素点的灰度值,确定所述目标图像内各个像素点的漫反射率与法向量的乘积,包括:
25、分别将所述多个待测图像内的像素点拆分为c行像素点,其中,c为大于1的整数;
26、根据朗伯反射原理以及所述多个待测图像内c行像素点的灰度值,逐行求解每行像素点的漫反射率与法向量的乘积,得到c行像素点的漫反射率与法向量的乘积;
27、根据所述c行像素点的漫反射率与法向量的乘积,确定所述目标图像内各个像素点的漫反射率与法向量的乘积。
28、在一可实施方式中,所述根据所述目标图像的法向量,确定所述目标图像内各个像素点与相邻像素点之间的相对高度关系,并通过所述相对高度关系得到目标图像,包括:
29、根据梯度与法向量之间的关系,通过所述目标图像的法向量确定所述目标图像内各个像素点与相邻像素点之间的相对高度差;
30、通过所述目标图像内各个像素点与相邻像素点之间的相对高度差以及高度基准值,确定目标图像。
31、在一可实施方式中,所述通过所述目标图像的法向量确定所述目标图像内各个像素点与相邻像素点之间的相对高度差,包括:
32、将所述目标图像各个像素点的法向量的三维坐标,输入相对高度差公式,确定所述目标图像内各个像素点与相邻像素点之间的相对高度差,其中,所述相对高度差公式为:
33、r(x,x-1)=zx-1,y-zx,y=nx/nz;
34、r(y,y-1)=zx,y-1-zx,y=ny/nz;
35、其中,nx,ny和nz分别为所述目标图像各个像素点的法向量的三维坐标值,zx,y为所述目标图像内坐标为(x,y)位置像素点的高度值,nx/nz为所述目标图像内坐标为(x,y)位置像素点和相邻像素点(x-1,y)在x方向上的相对高度差,r(x,x-1)为所述目标图像内坐标为(x,y)位置像素点和相邻像素点(x,y-1)在y方向上的相对高度差。
36、在一可实施方式中,在所述确定所述目标图像内各个像素点与相邻像素点之间的相对高度差之后,还包括:
37、根据所述目标图像的法向量,确定所述目标图像内各个像素点的散度值;
38、通过所述目标图像内各个像素点的散度值,对所述目标图像内各个像素点与相邻像素点之间的相对高度差进行强化,得到所述目标图像内各个像素点与相邻像素点之间的强化相对高度差;
39、相应的,所述通过所述目标图像内各个像素点与相邻像素点之间的相对高度差以及高度基准值,确定目标图像,包括:
40、通过所述目标图像内各个像素点与相邻像素点之间的强化相对高度差以及高度基准值,确定目标图像。
41、根据本公开的第三方面,提供了一种表面缺陷检测系统的检测装置,所述装置包括:
42、待测图像获取模块,用于在不同角度的照明子单元的照射条件下,获取多个待测图像;
43、法向量确定模块,用于根据所述多个待测图像内各个像素点的灰度值,确定目标图像的法向量;
44、目标图像确定模块,用于根据所述目标图像的法向量,确定所述目标图像内各个像素点与相邻像素点之间的相对高度关系,并通过所述相对高度关系得到目标图像。
45、在一可实施方式中,所述待测图像获取模块,具体用于:
46、分别在四个正交分区内选取照明子单元,得到四个目标照明子单元,其中,所述四个目标照明子单元属于不同角度环形照明单元;
47、在不同目标照明子单元的照射条件下,获取多个待测图像。
48、在一可实施方式中,所述法向量确定模块,具体用于:
49、根据朗伯反射原理以及所述多个待测图像内各个像素点的灰度值,确定所述目标图像内各个像素点的漫反射率与法向量的乘积;
50、通过归一化分离所述目标图像内各个像素点的漫反射率与法向量的乘积,得到所述目标图像各个像素点的法向量。
51、在一可实施方式中,所述法向量确定模块,具体用于:
52、分别将所述多个待测图像内的像素点拆分为c行像素点,其中,c为大于1的整数;
53、根据朗伯反射原理以及所述多个待测图像内c行像素点的灰度值,逐行求解每行像素点的漫反射率与法向量的乘积,得到c行像素点的漫反射率与法向量的乘积;
54、根据所述c行像素点的漫反射率与法向量的乘积,确定所述目标图像内各个像素点的漫反射率与法向量的乘积。
55、在一可实施方式中,所述目标图像确定模块,具体用于:
56、根据梯度与法向量之间的关系,通过所述目标图像的法向量确定所述目标图像内各个像素点与相邻像素点之间的相对高度差;
57、通过所述目标图像内各个像素点与相邻像素点之间的相对高度差以及高度基准值,确定目标图像。
58、在一可实施方式中,所述目标图像确定模块,具体用于:
59、将所述目标图像各个像素点的法向量的三维坐标,输入相对高度差公式,确定所述目标图像内各个像素点与相邻像素点之间的相对高度差,其中,所述相对高度差公式为:
60、r(x,x-1)=zx-1,y-zx,y=nx/nz;
61、r(y,y-1)=zx,y-1-zx,y=ny/nz;
62、其中,nx,ny和nz分别为所述目标图像各个像素点的法向量的三维坐标值,zx,y为所述目标图像内坐标为(x,y)位置像素点的高度值,nx/nz为所述目标图像内坐标为(x,y)位置像素点和相邻像素点(x-1,y)在x方向上的高度差,r(x,x-1)为所述目标图像内坐标为(x,y)位置像素点和相邻像素点(x,y-1)在y方向上的高度差。
63、在一可实施方式中,所述目标图像确定模块,具体用于:
64、在所述确定所述目标图像内各个像素点与相邻像素点之间的相对高度差之后,根据所述目标图像的法向量,确定所述目标图像内各个像素点的散度值;
65、通过所述目标图像内各个像素点的散度值,对所述目标图像内各个像素点与相邻像素点之间的相对高度差进行强化,得到所述目标图像内各个像素点与相邻像素点之间的强化相对高度差;
66、通过所述目标图像内各个像素点与相邻像素点之间的强化相对高度差以及高度基准值,确定目标图像。
67、根据本公开的第四方面,提供了一种电子设备,包括:
68、至少一个处理器;以及
69、与所述至少一个处理器通信连接的存储器;其中,
70、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行本公开所述的方法。
71、根据本公开的第五方面,提供了一种存储有计算机指令的非瞬时计算机可读存储介质,所述计算机指令用于使所述计算机执行本公开所述的方法。
72、本公开的表面缺陷检测系统及其检测方法、装置、设备及存储介质,通过在不同角度的照明子单元的照射条件下,获取多个待测图像;根据所述多个待测图像内各个像素点的灰度值,确定目标图像的法向量;根据所述目标图像的法向量,确定所述目标图像内各个像素点与相邻像素点之间的相对高度关系,并通过所述相对高度关系得到目标图像,能够清晰的表征物体表面的缺陷特征,避免漏检。
73、应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
- 还没有人留言评论。精彩留言会获得点赞!