一种相机调平对位测量装置及物料测量方法与流程
本技术涉及精密测量,特别是涉及一种相机调平对位测量装置及物料测量方法。
背景技术:
1、在精密测量工程领域,广泛采用相机对物料进行拍摄测量,且相机配备高倍率远心镜头,以使相机的测量结果更为精密准确。高倍率远心镜头(以下简称镜头)具有较高的放大倍率,拍摄效果好,但相应的存在景深小的不足,即镜头可以清楚成像的距离范围较小。
2、相机对物料进行尺寸测量时,首先通过定位装置对物料的位置进行固定,便于相机更好的对物料待测面进行测量。但由于物料的结构设计以及物料与定位装置之间的安装误差等原因,物料待测面与定位装置的定位基准面之间存在微小的角度偏差,从而使物料待测面与相机焦平面之间存在角度偏差,导致物料待测面部分位于镜头的景深外,相机拍摄到的超出镜头的景深的图像存在局部模糊的问题,模糊部分无法精确测量,导致相机的测量精度较低,且难以得到物料待测面整体的清晰图像。
技术实现思路
1、本技术实施例的目的在于提供一种相机调平对位测量装置及物料测量方法,以实现相机小景深条件下的清晰成像和完整成像,提高相机测量精度。具体技术方案如下:
2、本技术第一方面的实施例提供了一种相机调平对位测量装置,包括:
3、同轴支撑部,所述同轴支撑部包括底板;
4、图像捕获部,所述图像捕获部设置于所述底板上,所述图像捕获部包括镜头;
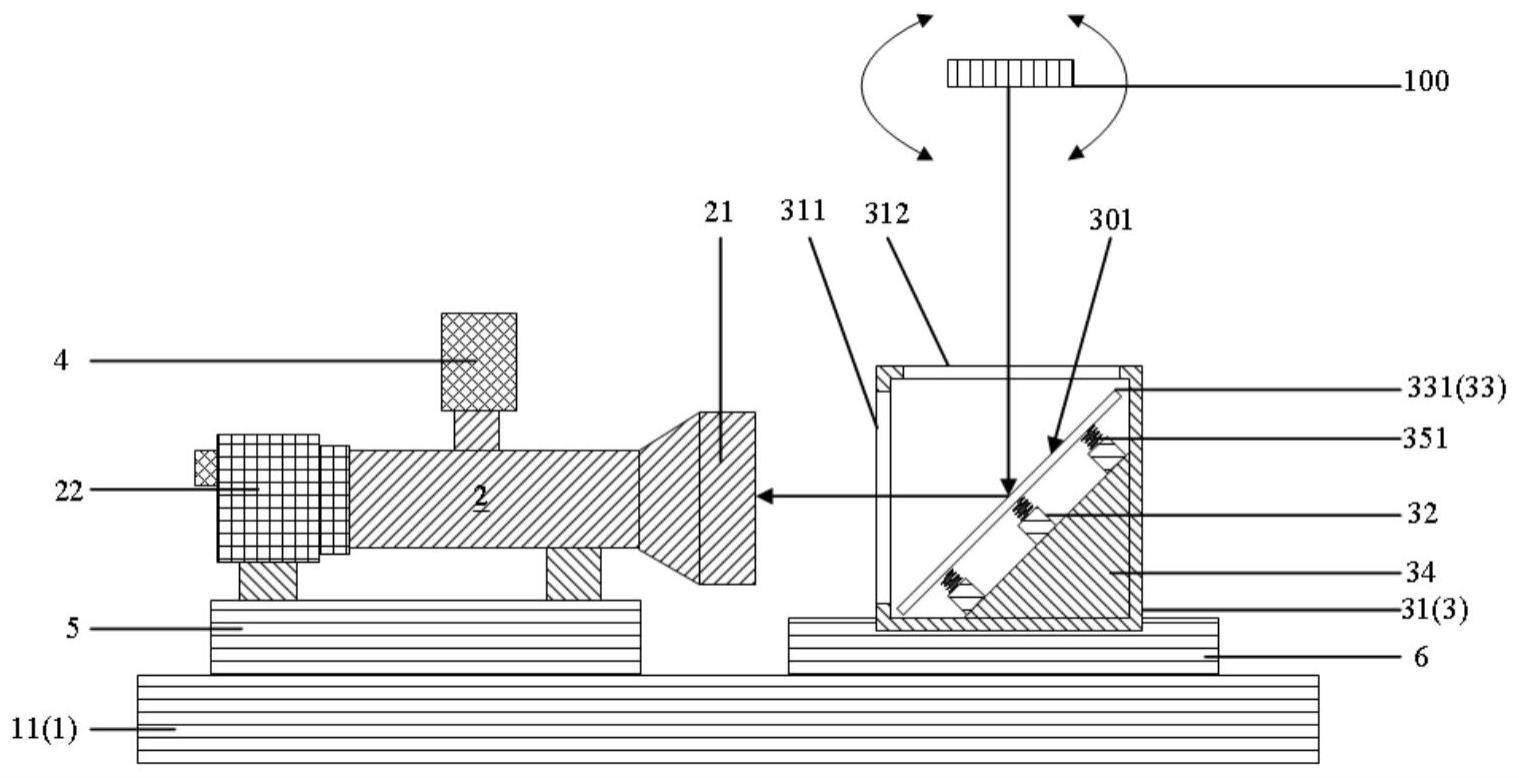
5、光路调整部,所述光路调整部设置于所述底板上,所述光路调整部和/或所述图像捕获部可相对于所述底板沿所述镜头的光轴方向移动;所述光路调整部包括:壳体、微位移驱动组件和光学镜片,所述壳体上设有与所述镜头相对设置的第一透光区,以及与物料待测面相对设置的第二透光区,所述第二透光区与所述第一透光区垂直设置;所述光学镜片置于所述壳体内,且所述光学镜片相对于所述底板倾斜设置,所述光学镜片包括与所述第一透光区及所述第二透光区相对的反射面;所述微位移驱动组件置于所述壳体内且位于所述光学镜片背离所述反射面的一侧,所述微位移驱动组件用于驱动所述光学镜片绕第一轴线和/或第二轴线转动,所述第一轴线和所述第二轴线平行于所述光学镜片,且所述第一轴线与所述第二轴线相垂直;
6、光源,所述光源用于产生朝向所述光学镜片的光线,所述光学镜片用于改变所述光线的传输方向,以使所述光线传输至所述物料待测面;
7、自适应控制部,所述自适应控制部与所述图像捕获部和所述光路调整部电连接,所述自适应控制部用于接收所述图像捕获部采集到的所述物料待测面的图像,并根据所述图像控制所述微位移驱动组件伸缩。
8、一些实施例中,所述微位移驱动组件包括第一驱动器和第二驱动器,所述第一驱动器和所述第二驱动器沿所述第一轴线间隔设置,所述第一驱动器和所述第二驱动器用于驱动所述光学镜片绕所述第二轴线旋转;和/或所述微位移驱动组件包括第三驱动器和第四驱动器,所述第三驱动器和所述第四驱动器沿所述第二轴线间隔设置,所述第三驱动器和所述第四驱动器用于驱动所述光路调整件绕所述第一轴线旋转。
9、一些实施例中,所述光学镜片为反射镜;所述光路调整部还包括固定块,所述固定块固定设置于所述壳体内,所述固定块包括平行于所述反射镜设置的倾斜面,所述微位移驱动组件的一侧固定设置于所述倾斜面上,所述微位移驱动组件的另一侧与所述反射镜背离所述反射面的一侧连接;所述光源设置于所述图像捕获部远离所述底板的一侧,且所述光源产生的光线的传输方向平行于所述镜头的光轴方向。
10、一些实施例中,所述光路调整部还包括第一阻尼器,所述微位移驱动组件通过所述第一阻尼器与所述反射镜背离所述反射面的一侧连接。
11、一些实施例中,所述光学镜片为半反射镜;所述光路调整部还包括支架,所述支架置于所述壳体内,所述支架包括一体连接的第一侧壁、第二侧壁、第三侧壁和第四侧壁,所述第一侧壁、所述第二侧壁、所述第三侧壁及所述第四侧壁共同围绕形成两端具有开口的容纳腔,所述第一侧壁和所述第三侧壁平行于所述第二透光区设置,且所述第一侧壁相较于所述第三侧壁更加靠近所述第二透光区设置,所述半反射镜与所述支架固定连接且覆盖所述容纳腔的一端开口;所述微位移驱动组件的一侧固定设置于所述壳体内壁,所述微位移驱动组件的另一侧与所述第三侧壁连接,所述微位移驱动组件用于驱动所述支架绕所述第一轴线和/或所述第二轴线转动;所述光源固定设置于所述容纳腔内。
12、一些实施例中,所述光路调整部还包括第二阻尼器,所述微位移驱动组件通过所述第二阻尼器与所述第三侧壁连接。
13、一些实施例中,所述底板上设有轨道,所述轨道的延伸方向平行于所述镜头的光轴方向;所述相机调平对位测量装置还包括平移对焦部,所述平移对焦部与所述轨道滑动连接,所述图像捕获部固定设置于所述平移对焦部上;和/或所述相机调平对位测量装置还包括平移微调台,所述平移微调台与所述轨道滑动连接,所述光路调整部固定设置于所述平移微调台上。
14、一些实施例中,所述微位移驱动组件包括压电陶瓷驱动器或音圈电机。
15、一些实施例中,所述自适应控制部包括工控机。
16、本技术第二方面的实施例提供了一种物料测量方法,应用于上述中任一所述的相机调平对位测量装置中的自适应控制部,所述相机调平对位测量装置还包括同轴支撑部、图像捕获部和光路调整部,所述物料测量方法包括:
17、通过所述图像部捕获部获取物料的待测面的图像;
18、将所述图像分割为多个子图像;
19、确定各个子图像的图像清晰度;
20、根据所述多个子图像的图像清晰度极差调整所述光路调整部中的微位移驱动组件的位移伸缩量,以使所述光路调整部中的光学镜片绕第一轴线和/或第二轴线转动,直至所述多个子图像的图像清晰度极差小于第一预设阈值,其中,所述多个子图像的清晰度极差为所述多个子图像的图像清晰度中最大的图像清晰度与最小的图像清晰度的差值;
21、根据所述各个子图像的图像清晰度极差控制所述图像捕获部和/或所述光路调整部相对于所述同轴支撑部移动,直至所述各个子图像的图像清晰度极差小于第二预设阈值,其中,所述图像捕获部和/或所述光路调整部的移动方向平行于所述图像捕获部中镜头的光轴方向;
22、根据所述待测面的图像对所述物料进行轮廓识别及尺寸测量。
23、一些实施例中,所述根据所述各个子图像的图像清晰度极差调整所述光路调整部中微位移驱动组件的位移伸缩量的步骤,包括:
24、确定每一子图像中各个像素点的灰度值;
25、根据每一子图像中各个像素点的灰度值确定多个子图像间的灰度梯度值;
26、根据所述灰度梯度值确定所述图像的灰度梯度矢量;
27、跟据所述灰度梯度矢量确定所述光路调整部中微位移驱动组件的位移伸缩量。
28、本技术实施例中提供的相机调平对位测量装置中,光路调整部包括壳体,壳体上具有垂直设置的第一透光区和第二透光区,壳体内设置有倾斜设置的光学镜片,且光学镜片的反射面朝向第一透光区和第二透光区,由于第一透光区与镜头相对设置,第二透光区与物料待测面对应设置,因此光线经由物料待测面反射后能够经由第二透光区到达光学镜片的反射面,然后经过光学镜片反射后到达镜头,因此镜头能够获取到物料待测面经由光学镜片所成的图像,使得镜头能够通过光学镜片拍摄到物料待测面。通过本技术实施例提供的相机调平对位测量装置对物料进行测量时,首先控制光源开启,使光源产生的光线经由光学镜片反射或折射后到达物料待测面,使得物料待测面处具有充足的光线,并使第二透光区与物料待测面相对设置,镜头与第一透光区相对设置,即使得镜头通过第一透光区及第二透光区能够拍摄到完整的物料待测面。图像捕获部的镜头获取到物料待测面的图像后,将图像发送至自适应控制部,自适应控制部根据图像不同区域的清晰度控制微位移驱动组件伸缩,使得光学镜片绕第一轴线和/或第二轴线转动,调整光学镜片相对于底座的倾斜角度,从而改变物料待测面反射的光线的光路,直至待测物料面经由光学镜片所成的图像与图像捕获部的镜头的焦平面平行。最后控制图像捕获部和/或光路调整部沿光轴的轴线方向移动,调整镜头的焦距,使得物料待测面经由光学镜片所成的图像全部位于镜头的景深内,通过图像捕获部获取到物料待测面完整及清晰的图像,实现物料的测量。
29、其中,由于自适应控制部能够根据图像捕获部所拍摄的图像的不同区域的清晰度控制微位移驱动组件的伸缩量,从而对光学镜片的倾斜角度进行调整,能够对物料待测面经由光学镜片所成的图像进行调整,使得物料待测面经由光学镜片所成的图像与镜头焦平面平行。并且由于图像捕获部和/或光路调整部能够沿光轴的轴线方向移动,因此图像捕获部中镜头焦平面与光路调整部之间的距离可以调整,从而实现镜头焦距的调整,使得物料待测面经由光学镜片所成的图像全部位于镜头的景深内,使镜头能够获取到物料待测面完整且清晰的图像,实现相机小景深条件下的清晰成像和完整成像,便于相机对物料待测面进行轮廓识别及尺寸测量,提高相机的测量精度。
30、当然,实施本技术的任一产品或方法并不一定需要同时达到以上所述的所有优点。上述说明仅是本技术技术方案的概述,为了能够更清楚了解本技术的技术手段,而可依照说明书的内容予以实施,并且为了让本技术的上述和其它目的、特征和优点能够更明显易懂,以下特举本技术的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!