车辆定位方法、装置、车辆及存储介质与流程
本技术涉及自动驾驶,特别涉及一种车辆定位方法、装置、车辆及存储介质。
背景技术:
1、自动驾驶车辆一般会采用rtk(real time kinematic,载波相位差分技术)定位的方式来获取自车所在经纬度信息,从而得知自车在高精地图的具体位置,来实现利用地图导航或控车等功能。由于rtk硬件及与卫星通讯方式本身的缺陷,当车辆行驶在隧道里以及高架桥下面时,有概率会出现定位不准或失效的情况,当这种情况发生时,如果自动驾驶系统仍然依赖定位来进行导航或者控车的话,则极有可能引发撞车等交通事故。
技术实现思路
1、本技术提供一种车辆定位方法、装置、车辆及存储介质,以解决相相关技术中定位系统信号较弱的情况下,车辆容易出现定位不准或者失效的情况,从而引发安全事故等问题。
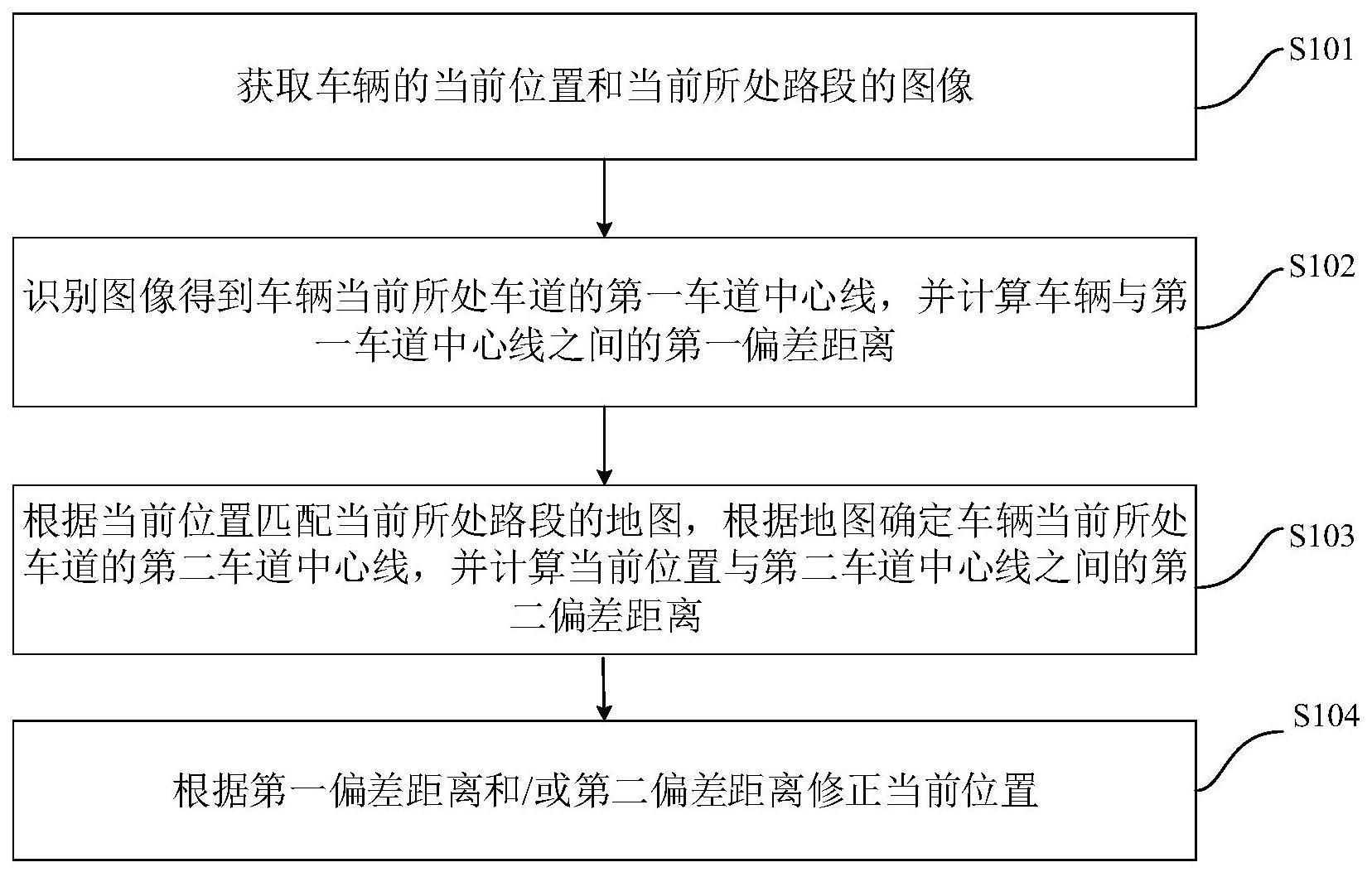
2、本技术第一方面实施例提供一种车辆定位方法,包括以下步骤:获取车辆的当前位置和当前所处路段的图像;识别所述图像得到所述车辆当前所处车道的第一车道中心线,并计算所述车辆与所述第一车道中心线之间的第一偏差距离;根据当前位置匹配所述当前所处路段的地图,根据所述地图确定所述车辆当前所处车道的第二车道中心线,并计算所述当前位置与所述第二车道中心线之间的第二偏差距离;根据所述第一偏差距离和/或所述第二偏差距离修正所述当前位置。
3、根据上述技术手段,本技术实施例可以分别计算视觉感知图像中和地图中车辆当前所处车道距离图像中和地图中车道中心线的偏差距离,通过第一偏差距离和/或第二偏差距离修正车辆位置,仅利用车辆上原有的传感器,无需额外增加成本,实现在隧道、高架桥下定位容易失准的场景下,提高定位精度,车辆能够顺利通过,保证系统安全及稳定性。
4、可选地,所述根据所述第一偏差距离和/或所述第二偏差距离修正所述当前位置,包括:分别根据所述图像和所述地图确定所述当前所处路段的车道数量,以及所述车辆当前所处车道;若根据所述图像和所述地图确定的所述车道数量和所述当前所处车道均一致,则采用第一修正方式修正所述当前位置,其中,所述第一修正方式为:根据所述第一偏差距离与所述第二偏差距离的距离差值修正所述当前位置;若根据所述图像和所述地图确定的所述车道数量一致、所述当前所处车道不一致,则采用第二修正方式修正所述当前位置,其中,所述第二修正方式为:根据所述第一车道中心线确定所述车辆在所述地图上的车道中心线,并根据所述第一偏差距离修正所述当前位置;若根据所述图像和所述地图确定的所述车道数量和所述当前所处车道均不一致,则根据上一修正周期的修正方式修正所述当前位置。
5、根据上述技术手段,本技术实施例可以通过判断图像上和地图上的车道数量和当前所处车道是否一致,使用不同的修正方式进行修正,保证车辆行驶的安全性。
6、可选地,所述采用第一修正方式修正所述当前位置,还包括:检测所述图像对应确定的车道中是否存在无效车道;若存在无效车道,且所述无效车道的无效时长小于预设时长,则基于上一修正周期的距离差值修正所述当前位置,否则根据当前周期的距离差值修正所述当前位置。
7、根据上述技术手段,本技术实施例可以在出现无效车道且无效时长小于预设时长时,基于上一修正周期的距离差值进行修正,避免视觉感知中对车道的识别不够稳定,进行错误修正。
8、可选地,所述采用第一修正方式修正所述当前位置,还包括:识别所述车辆是否正在执行换道动作;若所述车辆执行换道动作,则基于上一修正周期的距离差值修正所述当前位置,否则根据当前周期的距离差值修正所述当前位置。
9、根据上述技术手段,本技术实施例在车辆进行换道的情况下,基于上一修正周期的距离差值进行修正,避免将定位修正到错误的车道内,保证行驶安全。
10、可选地,所述识别所述车辆是否正在执行换道动作,包括:检测所述车辆距离所述当前所处车道的任意边界之间实际距离;若距离所述当前所处车道的任意边界之间实际距离小于预设距离,则判定所述车辆正在执行换道动作,否则判定所述车辆未执行换道动作,或者,换道结束。
11、根据上述技术手段,本技术实施例可以根据车辆距离当前所处车道任意边界的距离判断车辆是否处于变道过程中,从而针对变道过程中的车辆使用上一修正周期的距离差值进行修正,避免修正错误。
12、可选地,在采用第一修正方式修正所述当前位置之前,还包括:判断所述距离差值是否大于误差阈值;若所述距离差值大于所述误差阈值,则不执行修正动作,否则采用第一修正方式修正所述当前位置。
13、根据上述技术手段,本技术实施例在距离差值过大时,不进行修正,避免由于视觉感知识别异常导致的距离差值过大。
14、可选地,所述根据上一修正周期的修正方式修正所述当前位置,包括:获取所述车辆行驶过程的运动信息;根据所述车辆的运动信息计算所述车辆的当前位置,根据所述上一修正周期的修正方式修正所述当前位置。
15、根据上述技术手段,本技术实施例可以通过车辆的运动信息来计算车辆的实际位置,进行位置修正,避免由于视觉感知识别出现异常时进行修正而导致修正结果有明显错误,有一定安全隐患。
16、可选地,在根据所述第一偏差距离和/或所述第二偏差距离修正所述当前位置之后,还包括:对修正后的位置数据进行滤波处理,得到处理后的位置数据。
17、根据上述技术手段,本技术实施例通过对修正后的位置数据进行滤波处理,避免了因为原始计算值如果抖动频繁,可能会造成车辆的横向控制不稳,具有安全隐患的问题。
18、可选地,在根据所述第一偏差距离和/或所述第二偏差距离修正所述当前位置之后,还包括:获取所述当前位置修正之后的实际时长;若所述实际时长大于预设时长,则重新对所述车辆的当前位置进行修正。
19、根据上述技术手段,本技术实施例通过判断当前位置修正之后的时长是否大于预设时长,当大于时,则表示车辆位置并没有进行准确修正,需要重新进行修正,以确保车辆行驶的安全性。
20、本技术第二方面实施例提供一种车辆定位装置,包括:获取模块,用于获取车辆的当前位置和当前所处路段的图像;第一计算模块,用于识别所述图像得到所述车辆当前所处车道的第一车道中心线,并计算所述车辆与所述第一车道中心线之间的第一偏差距离;第二计算模块,用于根据当前位置匹配所述当前所处路段的地图,根据所述地图确定所述车辆当前所处车道的第二车道中心线,并计算所述当前位置与所述第二车道中心线之间的第二偏差距离;修正模块,用于根据所述第一偏差距离和/或所述第二偏差距离修正所述当前位置。
21、本技术第三方面实施例提供一种车辆,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的车辆定位方法。
22、本技术第四方面实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的车辆定位方法。
23、由此,本技术至少具有如下有益效果:
24、(1)本技术实施例可以分别计算视觉感知图像中和地图中车辆当前所处车道距离图像中和地图中车道中心线的偏差距离,通过第一偏差距离和/或第二偏差距离修正车辆位置,仅利用车辆上原有的传感器,无需额外增加成本,实现在隧道、高架桥下等定位容易失准的场景下,提高定位精度,车辆能够顺利通过,保证系统安全及稳定性。
25、(2)本技术实施例可以通过判断图像上和地图上的车道数量和当前所处车道是否一致,使用不同的修正方式进行修正,保证车辆行驶的安全性。
26、(3)本技术实施例可以在出现无效车道且无效时长小于预设时长时,基于上一修正周期的距离差值进行修正,避免视觉感知中对车道的识别不够稳定,进行错误修正。
27、(4)本技术实施例在车辆进行换道的情况下,基于上一修正周期的距离差值进行修正,避免将定位修正到错误的车道内,保证行驶安全。
28、(5)本技术实施例可以根据车辆距离当前所处车道任意边界的距离判断车辆是否处于变道过程中,从而针对变道过程中的车辆使用上一修正周期的距离差值进行修正,避免修正错误。
29、(6)本技术实施例在距离差值过大时,不进行修正,避免由于视觉感知识别异常导致的距离差值过大。
30、(7)本技术实施例可以通过车辆的运动信息来计算车辆的实际位置,进行位置修正,避免由于视觉感知识别出现异常时进行修正而导致修正结果有明显错误,有一定安全隐患。
31、(8)本技术实施例通过对修正后的位置数据进行滤波处理,避免了因为原始计算值如果抖动频繁,可能会造成车辆的横向控制不稳,具有安全隐患的问题。
32、(9)本技术实施例通过判断当前位置修正之后的时长是否大于预设时长,当大于时,则表示车辆位置并没有进行准确修正,需要重新进行修正,以确保车辆行驶的安全性。
33、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!