一种桥梁用超声波探伤检测机器人
本发明涉及桥梁探测,特别涉及一种桥梁用超声波探伤检测机器人。
背景技术:
1、中国是世界桥梁最多、里程最长的国家,但是桥梁在长时间使用过程中,特别是桥梁上的一些重要配件,如对桥梁起支撑作用的斜拉索在自然条件、温度气候和车辆通行等因素长时间影响下可能会产生变化或安全隐患,这就使得对桥梁斜拉索的定期检测尤为重要,同时,超声波检测方式能够对桥梁斜拉索起到很好的检测效果,但因桥梁斜拉索自身结构问题,造成检测起来特别麻烦,如公开号为cn111305064a的中国发明专利,提供了一种桥梁斜拉索超声波检测机器人,包括上侧端面内设有前后贯穿的装卸腔的机器人机体,所述机器人机体上端面内左右侧位置分别设有与所述装卸腔左右壁连通的左凹槽和右凹槽,所述左凹槽与所述右凹槽之间设有能够将所述装卸腔上侧端面封闭的上底板;通过在机器人机体内设有能够打开并锁死的装卸腔,在通过夹紧装置将机器人前后端面内上下左右对应设有的夹紧轮与桥与桥梁斜拉索夹紧,使得机器人机体能够稳定滑动在桥梁斜拉索上,使得超声波检测的发射传感器和接收传感器以及能够录像的摄像头稳定工作。这个设备利用机器人机体内设有能够打开并锁死的装卸腔,帮助机器人能够安装在桥梁斜拉索上进行检测。
2、但是,现有技术中大部分的检测机器人难以对桥体检测,对于桥下的检测安装更加困难,对于检测人员的要求更高,而传统的飞行器检测不具备超声检测,且无法调节检测角度,难以满足复杂环境桥体的检测,故急需这样的一种桥梁用超声波探伤检测机器人。
技术实现思路
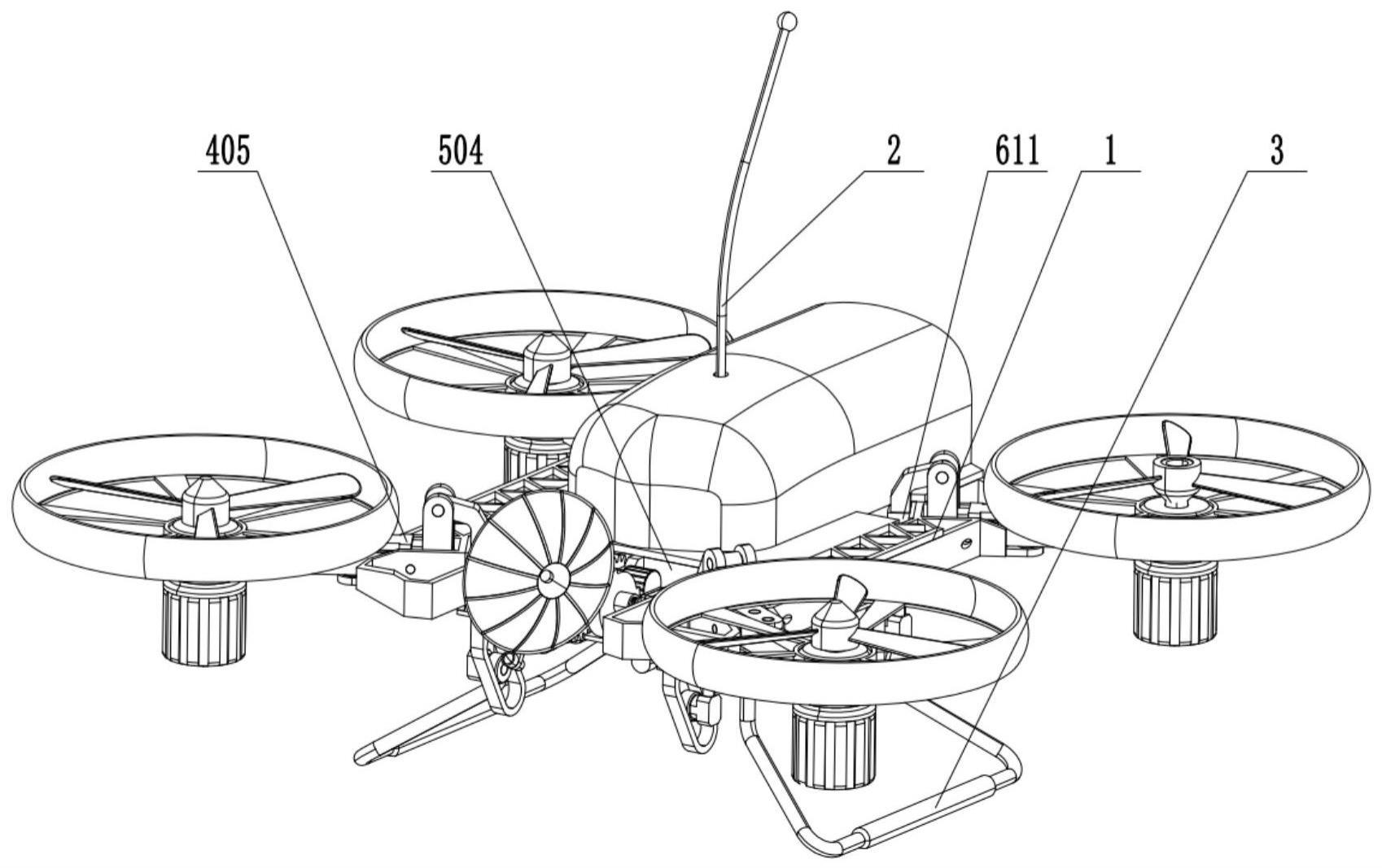
1、针对上述技术问题,本发明采用的技术方案为:一种桥梁用超声波探伤检测机器人,包括放置在地面的撑脚,所述的撑脚上固定安装有机架,机架上固定安装有机载模块,所述的机架上设置有飞行装置,所述的飞行装置包括震动架,震动架与机架转动安装,所述的机架用于装载机载模块和飞行装置,所述的机架上设置有探测装置,所述的探测装置包括支架,支架与机架固定安装,所述的探测装置用于对桥梁进行超声波探伤检测,所述的飞行装置用于携带探测装置到达桥梁周围,所述的机架上设置有调节装置,包括搭接架,搭接架与机架固定安装,所述的调节装置用于调节飞行姿态。
2、飞行装置控制机器人起飞,配合调节装置控制机器人的飞行角度和方向,机器人到达桥梁附近后,通过探测装置对桥梁进行超声波探伤检测。
3、进一步的,所述的飞行装置包括滑动安装在震动架上的电机架,电机架和震动架之间设置有震动弹簧,电机架上固定安装有起飞电机,起飞电机的输出轴上固定安装有扇叶,电机架上固定安装有扇叶框。
4、起飞电机转动带动扇叶转动,通过机架上设置的四组飞行装置的扇叶转动,来带动机器人飞行,在飞行过程中电机架和震动架之间设置有震动弹簧,避免震动影响机器人本体。
5、进一步的,所述的探测装置包括固定安装在支架下方的电缸架,电缸架上滑动安装有推叉,推叉上固定安装有电缸,电缸的端部与电缸架固定安装,支架上固定安装有调整电机,调整电机的输出轴上固定安装有齿轮,支架上固定安装有连接架,连接架上固定安装有贯长轴,贯长轴上滑动安装有卡盘,卡盘与连接架之间设置有压缩弹簧,卡盘上固定安装有轮架,轮架上转动安装有接触轮,贯长轴上转动安装有凸盘和转动架,凸盘和转动架固定安装,转动架上固定安装有半齿轮,半齿轮与齿轮啮合,转动架上固定安装有超声波探头,超声波探头上固定安装有超声接收器,超声接收器上固定安装有摄像头。
6、通过超声接收器上固定安装的摄像头探视桥梁外观缺陷,以便确定探伤区域,通过超声波探头发射超声波,直接作用于桥梁可视故障连接处,通过超声接收器接收反馈信号,信号输入到机架内进行反馈,在机架中安装有电池、控制芯片、天线、物联网模块、电子陀螺仪等元器件,以便完成所需的检测工作。
7、当需要调整超声波探头和摄像头的角度时,调整电机转动,通过齿轮带动半齿轮转动,从而带动转动架转动,从而实现超声波探头和摄像头的角度调节,压缩弹簧初始状态下为压缩状态,超声波探头和摄像头角度调节完成后,电缸伸长,推叉远离接触轮,卡盘在压缩弹簧回弹的作用下卡盘与凸盘接触并卡住,避免超声波探头因为外力因素改变方向,同时卡盘的缺口半圆区域限制压缩弹簧的极限转动角度,避免设备角度过转损坏。
8、进一步的,所述的调节装置包括固定安装在机架上的底电缸,底电缸的端部固定安装有推板,机架上固定安装有导轨座,导轨座上固定安装有导轨,推板与导轨滑动安装,导轨座和推板之间设置有居中弹簧,推板上固定安装有斜槽板,机架上滑动安装有升降杆,升降杆上转动安装有槽滚轮,槽滚轮与斜槽板滑动安装,机架上固定安装有搭接架,升降杆上固定安装有升提块,升提块与搭接架滑动安装,升提块上转动安装有连架,连架与震动架转动安装。
9、当需要调节飞行姿态时,底电缸伸缩带动推板相对于机架滑动,从而带动斜槽板滑动,从而带动升降杆在机架的孔中滑动,从而带动升提块进行升降,从而通过连架带动震动架相对于机架进行转动,从而实现飞行姿态的调整。
10、进一步的,所述的电机架和震动架的上下缝隙间均设置有震动弹簧。
11、进一步的,所述的凸盘侧边上设置有凸起块,卡盘上设置有缺口区和非缺口区。
12、进一步的,所述的凸盘端面上设置有多个凸起,卡盘与凸盘面对的端面上设置有多个凸起。
13、本发明与现有技术相比的有益效果是:(1)本发明设置的飞行装置和调节装置相结合可以使得机器人能够飞行到桥梁附近,使得机器人能够近距离对桥梁进行探伤检测;(2)本发明设置的探测装置首先通过摄像头识别出桥梁外观缺陷,以便确定探伤区域,通过超声波探头发射超声波,直接作用于桥梁可视故障连接处,通过超声接收器接收反馈信号,信号输入到机架内进行反馈,在机架中安装有电池、控制芯片、天线、物联网模块、电子陀螺仪等元器件,以便完成所需的检测工作;(3)本发明设置的探测装置上的超声接收器、超声波探头、摄像头均可进行角度调节,并在使用时被限位卡住,避免探头因为外力因素改变方向。
技术特征:
1.一种桥梁用超声波探伤检测机器人,包括放置在地面的撑脚(3),其特征在于:所述的撑脚(3)上固定安装有机架(1),机架(1)上固定安装有机载模块(2),所述的机架(1)上设置有飞行装置,所述的飞行装置包括震动架(405),震动架(405)与机架(1)转动安装,所述的机架(1)用于装载机载模块(2)和飞行装置,所述的机架(1)上设置有探测装置,所述的探测装置包括支架(504),支架(504)与机架(1)固定安装,所述的探测装置用于对桥梁进行超声波探伤检测,所述的飞行装置用于携带探测装置到达桥梁周围,所述的机架(1)上设置有调节装置,包括搭接架(611),搭接架(611)与机架(1)固定安装,所述的调节装置用于调节飞行姿态。
2.根据权利要求1所述的一种桥梁用超声波探伤检测机器人,其特征在于:所述的飞行装置包括滑动安装在震动架(405)上的电机架(404),电机架(404)和震动架(405)之间设置有震动弹簧(406),电机架(404)上固定安装有起飞电机(403),起飞电机(403)的输出轴上固定安装有扇叶(402),电机架(404)上固定安装有扇叶框(401)。
3.根据权利要求1所述的一种桥梁用超声波探伤检测机器人,其特征在于:所述的探测装置包括固定安装在支架(504)下方的电缸架(507),电缸架(507)上滑动安装有推叉(506),推叉(506)上固定安装有电缸(505),电缸(505)的端部与电缸架(507)固定安装,支架(504)上固定安装有调整电机(508),调整电机(508)的输出轴上固定安装有齿轮(509),支架(504)上固定安装有连接架(510),连接架(510)上固定安装有贯长轴(518),贯长轴(518)上滑动安装有卡盘(512),卡盘(512)与连接架(510)之间设置有压缩弹簧(511),卡盘(512)上固定安装有轮架(513),轮架(513)上转动安装有接触轮(514),贯长轴(518)上转动安装有凸盘(516)和转动架(517),凸盘(516)和转动架(517)固定安装,转动架(517)上固定安装有半齿轮(515),半齿轮(515)与齿轮(509)啮合,转动架(517)上固定安装有超声波探头(502),超声波探头(502)上固定安装有超声接收器(501),超声接收器(501)上固定安装有摄像头(503)。
4.根据权利要求2所述的一种桥梁用超声波探伤检测机器人,其特征在于:所述的调节装置包括固定安装在机架(1)上的底电缸(601),底电缸(601)的端部固定安装有推板(602),机架(1)上固定安装有导轨座(603),导轨座(603)上固定安装有导轨(604),推板(602)与导轨(604)滑动安装,导轨座(603)和推板(602)之间设置有居中弹簧(605),推板(602)上固定安装有斜槽板(606),机架(1)上滑动安装有升降杆(608),升降杆(608)上转动安装有槽滚轮(607),槽滚轮(607)与斜槽板(606)滑动安装,机架(1)上固定安装有搭接架(611),升降杆(608)上固定安装有升提块(609),升提块(609)与搭接架(611)滑动安装,升提块(609)上转动安装有连架(610),连架(610)与震动架(405)转动安装。
5.根据权利要求2所述的一种桥梁用超声波探伤检测机器人,其特征在于:所述的电机架(404)和震动架(405)的上下缝隙间均设置有震动弹簧(406)。
6.根据权利要求3所述的一种桥梁用超声波探伤检测机器人,其特征在于:所述的凸盘(516)侧边上设置有凸起块,卡盘(512)上设置有缺口区和非缺口区。
7.根据权利要求3所述的一种桥梁用超声波探伤检测机器人,其特征在于:所述的凸盘(516)端面上设置有多个凸起,卡盘(512)与凸盘(516)面对的端面上设置有多个凸起。
技术总结
本发明公开了一种桥梁用超声波探伤检测机器人,包括放置在地面的撑脚,所述的撑脚上固定安装有机架,机架上固定安装有机载模块,机架上设置有飞行装置,机架用于装载机载模块和飞行装置,机架上设置有探测装置,探测装置用于对桥梁进行超声波探伤检测,飞行装置用于携带探测装置到达桥梁周围,机架上设置有调节装置,调节装置用于调节飞行姿态。探测装置首先通过摄像头识别出桥梁外观缺陷,以便确定探伤区域,通过超声波探头发射超声波,直接作用于桥梁可视故障连接处,通过超声接收器接收反馈信号,信号输入到机架内进行反馈,在机架中安装有电池、控制芯片、天线、物联网模块、电子陀螺仪等元器件,以便完成所需的检测工作。
技术研发人员:王哲,黎帅,张超,王泽湘,李霞辉,胡宏伟,杨庆,龙浩南,李泉
受保护的技术使用者:湖南汽车工程职业学院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!