一种智慧交通用多维度角度可调全向扫描毫米波雷达的制作方法
本发明属于智慧交通领域,具体地说是一种智慧交通用多维度角度可调全向扫描毫米波雷达。
背景技术:
1、目前随着社会的不断发展,智慧交通出行中毫米波雷达的应用越来越广泛,毫米波雷达,通常毫米波是指30-300ghz频域的电磁波。与微波相比,毫米波的分辨率高、指向性好、抗干扰能力强和探测性能好;与红外相比,毫米波的大气衰减小、对烟雾灰尘具有更好的穿透性、受天气影响小。此外,毫米波雷达在其测量目标的距离、速度和角度上展现的性能也要优于激光雷达和摄像头等其他传感器。同时毫米波雷达还是汽车高级驾驶辅助系统的主力传感器,是自动驾驶稳定工作的重要保障;而且在航海,边界测定等领域1公里以内的距离等数据检测时毫米波雷达都具有及其重要的技术优势。
2、但是,目前交通出行相关领域使用的毫米波雷达无论是固态雷达还是旋转雷达都都存在以问题:首先单雷达监测,效率较低、跟踪目标的数量较低,检测半径较小,且机械结构使用是一直转动导致其机械结构易损坏,影响其使用寿命,且目前毫米波雷达的转动机械结构均为进口,其维修和更换成本很高;其次,雷达俯仰角度无法根据实际使用情况进行调节,必须拆卸后才能进行调节,从而便于广泛使用。
技术实现思路
1、本发明提供一种智慧交通用多维度角度可调全向扫描毫米波雷达,用以解决现有技术中的缺陷。
2、本发明通过以下技术方案予以实现:
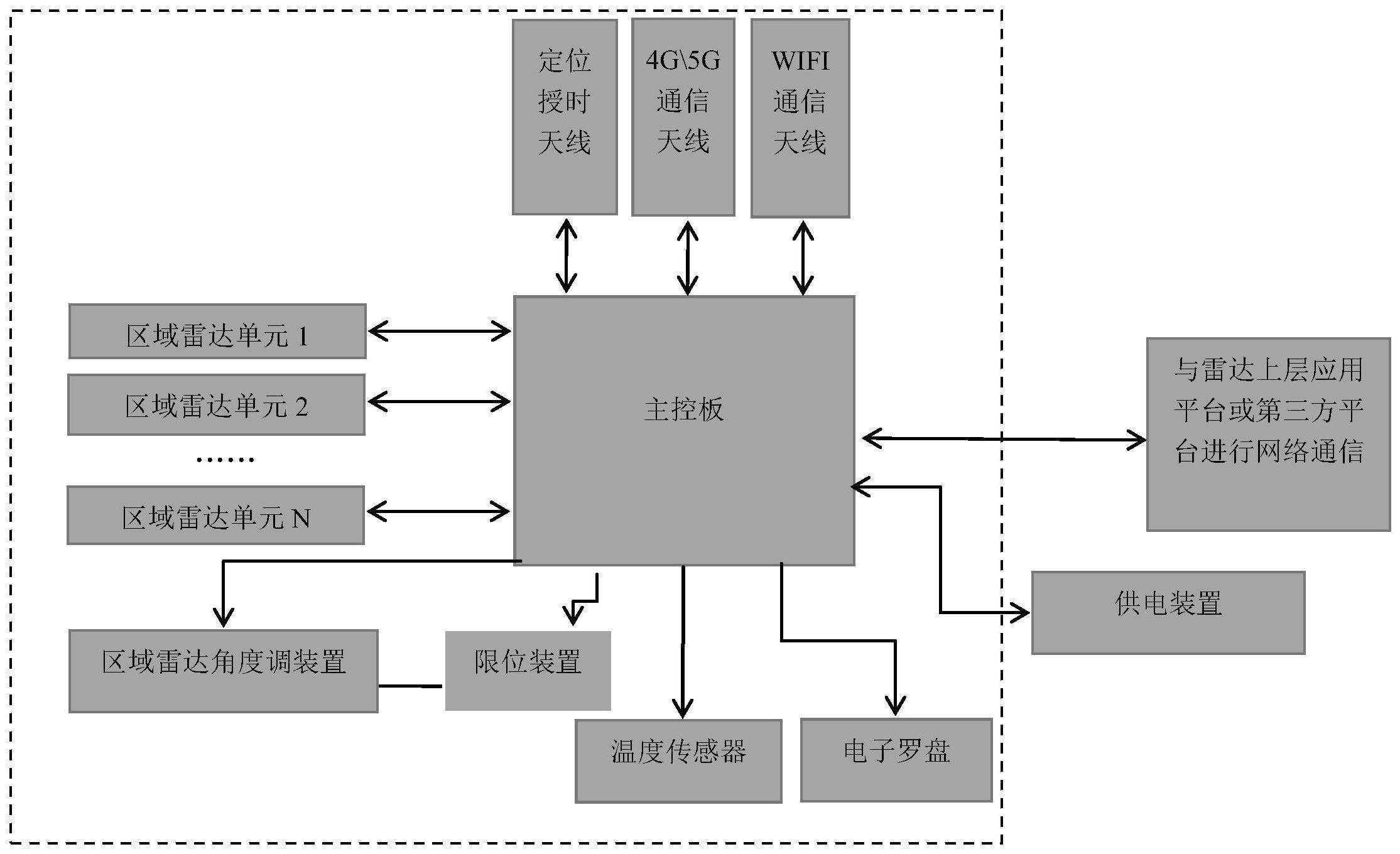
3、一种智慧交通用多维度角度可调全向扫描毫米波雷达,包括主控板,所述的主控板电性连接数个区域雷达单元,所述的区域雷达单元固定设置,所述的区域雷达的开窗角度之和大于360°,所述的主控板电性连接通信单元、温度传感器、定位授时天线、区域雷达调节装置和限位装置,所述的主控板连接供电装置,所述的主控板通过通信单元与雷达上层应用平台或第三方平台进行数据传递。
4、如上所述的一种智慧交通用多维度角度可调全向扫描毫米波雷达,所述的区域雷达调节装置能够统一调整区域雷达的俯仰角度,所述的限位装置能够根据实际情况限定区域雷达的调节角度。
5、如上所述的一种智慧交通用多维度角度可调全向扫描毫米波雷达,其正常运行操作包括如下步骤:
6、步骤一:雷达设置
7、设定相邻区域雷达关联机制,并根据预设通过区域雷达调节装置调整区域雷达角度,设定相邻区域雷达重叠区域内统一目标的合并机制,设定区域雷达扫描后所有目标编制显示规则,设定区域雷达扫描模式,启动区域雷达进行扫描获取覆盖区域内的所有点云数据;
8、步骤二:目标分类输出
9、有效目标输出
10、获取区域雷达覆盖区域内的所有点云数据,初次建立杂波基底图,获取周界数据,画定剔除杂波干扰和有效检测区域界限,滤除界限外目标,得到有效目标输出;
11、障碍物目标输出
12、数据采集后堆叠处理,对目标状态和特征进行处理后对目标进行分类,虚假目标和静止目标与与杂波基底图对比滤除动态目标、发现新的静止目标或缓慢变化的目标,得到障碍物目标输出。
13、如上所述的一种智慧交通用多维度角度可调全向扫描毫米波雷达,所述的步骤一中区域雷达角度自动调节的设定为:区域雷达俯仰角度实时获取;调用区域雷达重叠区域计算模型;自动生成相邻区域雷达重叠区域设置参数;相邻区域雷达重叠区域自动设置。
14、如上所述的一种智慧交通用多维度角度可调全向扫描毫米波雷达,所述的步骤一中区域雷达重叠区域同一目标规则设定包括:方向判断机制参数设定;加速度判断机制参数设;航向角判断机制参数设;距离判断机制参数设定;速度判断机制参数设定;目标融合范围值设定;同一目标判定频率设定。
15、如上所述的一种智慧交通用多维度角度可调全向扫描毫米波雷达,所述的步骤二中杂波基底图的建立规则为:周期性自动重新提取区域雷达点云数据并建立新的杂波基底图;周期性数据叠加建立完善的杂波基底图数据并保存等待调用;建立区域雷达周围环境数据信息等待调用。
16、如上所述的一种智慧交通用多维度角度可调全向扫描毫米波雷达,所述的区域雷达单元的运行方式包括异步式扫描堆叠融合输出和同步式扫描堆叠融合输出。
17、如上所述的一种智慧交通用多维度角度可调全向扫描毫米波雷达,所述的异步式扫描堆叠融合输出的运行模式为:区域雷达单元按照各自不同负责的扫描区域,采用顺时针扫描方式依次扫描并将各自扫描获得的数据送到主控板中进行缓存调用,核心处理模块将两两之间的重叠区域采集到的数据,多维度时空融合和阴影伴随数据融合算法将相邻的两个区域雷达单元所采集到的同一目标数据进行融合并赋予目标新的唯一身份信息继续放到数据缓存单元中等待调用,所有区域雷达单元都扫描完毕,并且所有重叠区域都已经融合完毕生成唯一目标数据后,核心处理单元将多拼接雷达通过异步式扫描并最终获取的完整360°雷达扫描数据对外输出。
18、如上所述的一种智慧交通用多维度角度可调全向扫描毫米波雷达,所述的同步式扫描堆叠融合输出的运行模式为:区域雷达单元按照各自不同负责的扫描区域,采用同时扫描方式对各自负责的区域进行同步扫描同时获得各自区域内的目标数据送入到数据缓存模块中进行缓存调用,核心数据处理单元将相邻两两之间的重叠区域采集到的目标数据,经过多维度时空融合和阴影伴随数据融合算法将相邻的两个雷达所采集到的同一目标数据进行融合并赋予目标新的唯一身份信息继续放到数据缓存单元中等待调用,所有区域雷达都扫描完毕,并且所有重叠区域都已经融合完毕生成唯一目标数据后,雷达数据处理单元将多拼接雷达通过同步式扫描并最终获取的完整360°雷达扫描数据对外输出。
19、如上所述的一种智慧交通用多维度角度可调全向扫描毫米波雷达,所述的重叠区域采集到的目标数据的融合操作为:当目标进入两个相邻雷达重叠检测区域时两个雷达会同时扫描到这个目标,扫描后的雷达原始数据再经过核心处理单元进行分析处理获得目标的动态数据,由于两个临近雷达所在位置的不同、扫描过程不同步、目标相对于两个雷达行驶方向不同、设定参数不同、目标跟踪定位精度有误差多种原因,即使是同一目标也会由于以上原因在系统中得出两个不一样的动态数据信息及id身份编号信息,在系统中会出现有重影或阴影现象,此时系统会以带有完整信息被跟踪a1目标为真实目标或主要目标,另一个雷达扫描同一目标a2为虚假目标或辅助目标;由于被跟踪定位的目标动态信息中包括:目标实时的运动速度、运动方向、经纬度、目标尺寸、目标类型、方向角、所在位置、目标距离雷达靶面的xyz坐标值、在各自雷达区域内唯一id身份编号以及目标有无异常情况出现等重要信息,由于雷达扫描目标是有一定的定位精度的,以此定位精度衡量参考基准,并以真实目标为中心设定一个关联目标范围,在此范围内所有的目标列为有效关联目标对象,超过此为范围的目标列为无效目标关联对象,对于无效目标关联对象系统不在关注,系统以目标的实时运动速度、目标运动方向、经纬度、目标尺寸、目标类型、所在车道为参考比较关联对象,并与预先设定的关联合并值为参考值以及符合该规律点迹连续重复出现次数m为判断是否关联融合的判定条件,m为1-10内的整数;对于那些满足这些要求的真实目标与虚假目标进行关联,并在预设目标关联融合重叠区域内进行融合,融合后的目标动态信息会以虚假目标动态信息为准,并将其中的id身份编号进行修正,id身份编号将会于之前的真实目标id身份编号保持一致,并将该动作持续下去并将被修正后的结果与该目标的特征信息形成完整的数据信息输出并存入永久数据库中以备调用,此外该修正后的目标完整信息将作为下一个重叠区域的真实目标信息使用,如果在重叠区域未能匹配成功的两个目标,真实目标所经过的所有点迹信息与完整数据信息将会存入永久数据库中以备调用,虚假目标动态信息将会被持续存入临时数据库中以备调用,直至在下一个数据融合点匹配回溯成功或目标驶离多个连续布设雷达所覆盖的检测区域为止。
20、如上所述的一种智慧交通用多维度角度可调全向扫描毫米波雷达,所述的主控板电性连接电子罗盘,所述的主控板内设置姿态模块,姿态检测模块用于对设备的是否处于正确姿态进行检测并发出异常姿报警。
21、如上所述的一种智慧交通用多维度角度可调全向扫描毫米波雷达,所述的主控板内设置电源模块。
22、如上所述的一种智慧交通用多维度角度可调全向扫描毫米波雷达,所述的通信模块可以采用4g通信模块、5g通信模块、wifi通信模块或有线网络通信模块中的任意一种或任意两种以上的组合。
23、如上所述的一种智慧交通用多维度角度可调全向扫描毫米波雷达,所述的主控板设置本地存储模块。
24、本发明的优点是:
25、1、通过远程控制实现对区域雷达角度的连续调节从而实现对雷达所覆盖的角度、检测范围、检测距离以及盲区进行精准调节以保障全向毫米波雷达能够适应更多的工作环境,维护方便快捷高效;
26、2、通过采用多维度动态时空数据融合方式,可实现区域雷达角度边调节、边融合的方式,提生设备自动化程度;
27、3、通过才采集自身传感器数据并进行实时分析,可实现对区域雷达自身的安全防护,保护过温保护、姿态变化保护、区域雷保护等内容;
28、4、通过多种通信方式、实现通信链路冗余保护,保证数据传输的安全性、可靠性、和完整性。
- 还没有人留言评论。精彩留言会获得点赞!