一种用于发动机油加注机定位与区域防错方法与流程
本发明涉及汽车发动机加油,具体涉及一种用于发动机油加注机定位与区域防错方法。
背景技术:
1、发动机在整机厂生产完成之后需要加注定量燃油,为后续发动机和整机测试提供动力燃油,传统的发动机燃油加注是通过人工方法手动加注,依次对生产线上的发动机实施加注,但是加注过程中存在由于人为失误导致漏加或者重复加注的情况,且此方法自动化程度不高,加注效率低。为了防止加注工程中的漏加或错加情况发生,提高发动机加注机的智能化水平,需要获取加油枪的实时位置,当超过加注区域的时候发出报警提示。实现以上功能的关键在于对加油枪的实时定位。位置信息服务是智能制造设备的重要信息,传统的位置信息服务由全球定位系统(global positioning system,gps)和惯性测量单元(inertial measurement unit,imu)提供,然而室内的定位由于特殊环境的限制,导致gps无法接收信号,限制了其进一步应用,超宽带(ultra-wideband,uwb)定位技术具有带宽宽、定位精度高、穿透力强等特点。在单路径传播环境中,节点之间没有干扰信号且没有障碍物,可以执行极其精确的距离估计。然而,在实际工厂车间环境中,信号经由多个路径到达接收器,并且环境中存在金属设备干扰信源和障碍物。imu利用陀螺仪和加速度计量测载体的角速度和比力信息,短期导航定位精度较高,但其误差随时间累积。uwb/imu组合既能利用imu解算的结果减少uwb的干扰误差影响,又能利用uwb的测距或解算信息抑制ins中随时间累积的误差迅速,从而获得更高的导航定位精度以及更丰富的导航信息方法和原理。双目视觉利用图像配准和跟踪技术获取实时位移和速度,不受现场障碍物的影响,但是会受到质地和光线的影响。imu和双目视觉都是获取相对位置,会产生积累误差,而uwb则是绝对位置信息,没有时间累积误差。因此本发明提出将uwb-imu-视觉组合定位用于加油枪的实时定位,提高加油枪室内定位的精度和稳定性。
技术实现思路
1、本发明的目的在于提供一种用于发动机油加注机定位与区域防错方法,以解决当前室内发动机加油枪定位的非视距误差和鲁棒性差的问题。
2、本发明是通过以下技术方案来实现:一种用于发动机油加注机定位与区域防错方法,其特征在于,包括以下步骤:
3、s1:系统初始化。根据现场的环境,安装好uwb定位基站,测量基站之间的相对距离,建立uwb位置坐标体系,确定各基站的绝对坐标。对双目视觉系统进行标定,获取相机的内参矩阵、外参矩阵、畸变矩阵,建立相机坐标系和uwb系的转换矩阵。根据现场发动机的分布区域和油枪的位置范围确定定位的边界。
4、s2:将uwb-imu-视觉装置安装于加油枪顶部,静置(静置时间5-10分钟),获取当前时刻的uwb位置数据和imu测量数据,其中,所述imu测量数据包括加速度计输出数据和陀螺仪输出数据。其中根据加速度计静止时间段内的输出均值,可获得初始姿态信息;
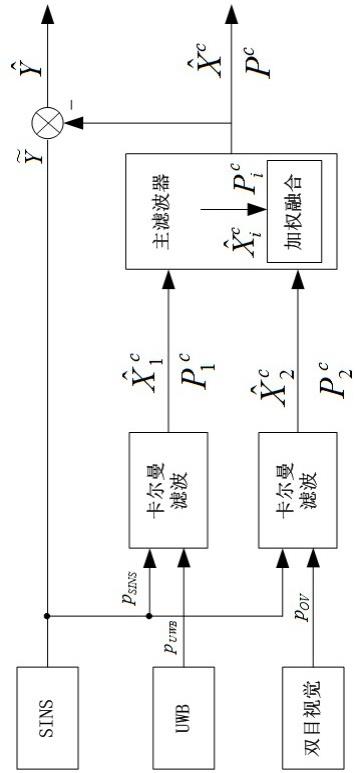
5、s3:在s2中获取到初始姿态角和初始位置信息后,惯导进入导航状态,并且,将imu导航结果与uwb输出的位置数据采用松耦合的方式进行一次卡尔曼滤波,得到最优估计下的初步定位结果;
6、s4:获取双目视觉的图像数据,建立视觉即时定位与地图构建(simultaneouslocalization and mapping, slam)模型,根据采集到的图像来计算出相机的运动姿态。对相机采集到的图像帧进行特征点的提取,此外还会进行特征匹配,即确定当前得到的特征点与之前获得的特征点之间的对应关系。当获得到已经通过算法进行匹配好的特征点对后,则依据他们对相机的运动进行估计。通过两帧图像中的信息估计出物体的实际位姿,即通过三角化过程获得二维图像上对应点的世界三维坐标;
7、s5:将相机坐标系的坐标转换为uwb坐标下的坐标位置,利用uwb和相机的坐标信息进行二次卡尔曼滤波融合;
8、s6:将s3得到的数据与s5得到的滤波结果进行无重置联邦滤波,得到最终的定位结果;
9、s7:将松耦合uwb和imu数据的融合定位信息与视觉图像定位信息进行松耦合,形成最终的定位结果,当定位结果超出s1中确定的定位的边界时,产生警示信息。
10、本发明uwb定位数据为绝对坐标位置,用以抑制其他两种传感器的误差积累,imu和视觉图像获取相对定位信息,为uwb绝对位置信息进行定位坐标优化。
11、uwb系统定位基站在室内遮掩物较少时,可放置于离地2.8m高及以上的位置,当高处障碍物较多时,可根据实际情况调整定位基站的位置和姿态,以取得较好的信号接收效果。
12、定位系统启动时,需要静置5-10分钟,用以惯性导航模块数据稳定和导航初始姿态确定。
13、在扩展卡尔曼滤波框架下,uwb和imu原始数据融合需要根据时间戳信息实现时钟同步。
14、本发明可以解决当前室内发动机加油枪定位的非视距误差和鲁棒性差的问题,提高加油枪室内定位的精度和稳定性。当定位结果超出s1中确定的定位的边界时,产生警示信息,进行区域防错。
技术特征:
1.一种用于发动机油加注机定位与区域防错方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的用于发动机油加注机定位与区域防错方法,其特征在于,融合了uwb-imu-视觉的定位数据,该方法解决了uwb定位存在的信号遮挡、人体吸收信号问题,imu导航存在的误差累计问题,视觉导航存在的尺度模糊和尺度漂移问题,充分发挥各自定位的优势。
3.根据权利要求1所述的用于发动机油加注机定位与区域防错方法,其特征在于,uwb定位基站在室内遮掩物较少时,可放置于离地2.8m高以上的位置,当高处障碍物较多时,可根据实际情况调整定位基站的位置和姿态,以取得较好的信号接收效果。
4.根据权利要求1所述的用于发动机油加注机定位与区域防错方法,其特征在于,定位系统启动时,需要静置5-10分钟,用以惯性导航模块数据稳定和导航初始姿态确定。
5.根据权利要求1所述的用于发动机油加注机定位与区域防错方法,其特征在于,在一次卡尔曼滤波框架下,uwb和imu原始数据融合需要调整数据采集的频率,对imu的数据进行降采样。
技术总结
本发明公开了一种用于发动机油加注机定位与区域防错方法,包括如下:S1:系统初始化;S2:获取UWB数据和IMU测量数据,S3:将导航结果与UWB输出的位置信息采用松耦合的方式进行一次卡尔曼滤波,得到最优估计下的定位结果;S4:通过三角化过程获得二维图像上对应点的世界三维坐标;S5:利用UWB和相机的坐标信息进行二次卡尔曼滤波融合;S6:将S3得到的数据与S5得到的滤波结果进行无重置联邦滤波,得到最终的定位结果;S7:将松耦合UWB和IMU数据的融合定位信息与视觉图像定位信息进行松耦合,形成最终的定位结果。本发明利用多源信息融合,弥补了单一定位方法的不足,整体系统提升了机器人定位方面的鲁棒性和精确性。
技术研发人员:喻光升,张亚鑫,黄飞虎,王昊,刘璇坤,刘浩,聂亚军
受保护的技术使用者:喻光升
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!