隧道钢筋网测距方法、系统、电子设备及存储介质与流程
本发明属于基于点云数据测距的,具体地涉及一种隧道钢筋网测距方法、系统、电子设备及存储介质。
背景技术:
1、激光雷达的出现为人们获取点云形式的空间几何结构数据提供了一种便捷的方法。相比于普通的二维图像数据,三维点云数据可以准确、密集的描绘物体的整体结构(诸如如1所示的隧道原始扫描样本),提供更加丰富的空间几何结构信息,有助于理解所处环境的三维空间特性并做出与之相应的决策。
2、隧道钢筋网相关数据的测量(诸如图2所示的钢筋网层状间距,图3所示的内层钢筋网中钢筋间的横向间距,以及图4所示的纵向间距)是隧道安全监测的不可或缺步骤。目前针对隧道钢筋网的相关数据通常采用激光雷达扫描以获取相关点云数据,获取的钢筋网点云数据量庞大,是数百万到甚至数十亿个点构成的大型场景。然而,钢筋网点云数据具有分散性、不规则性、无序性、分布不均匀性等特点,采用现有技术的分割识别计算方法处理钢筋网点云数据来计算钢筋网层状间距、内层钢筋网中钢筋间的横向间距及纵向间距等测量数据,往往因存在实时性不足、钢筋网难以严格数学描述、信噪比低等缺陷,导致隧道钢筋网测距整体效率及分割精度偏低,从而影响了隧道钢筋网数据测量的准确性。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种隧道钢筋网测距方法、系统、电子设备及存储介质,通过过滤、分割点云数据将复杂的测距场景拆分为单一的测距目标的组合,针对每个测距目标仅关注其测量对象的局部特性,放弃其他复杂的语义信息,提高隧道钢筋网测距整体效率及分割精度,提升隧道钢筋网数据测量的准确性。
2、第一方面,本发明提供一种隧道钢筋网测距方法,包括:
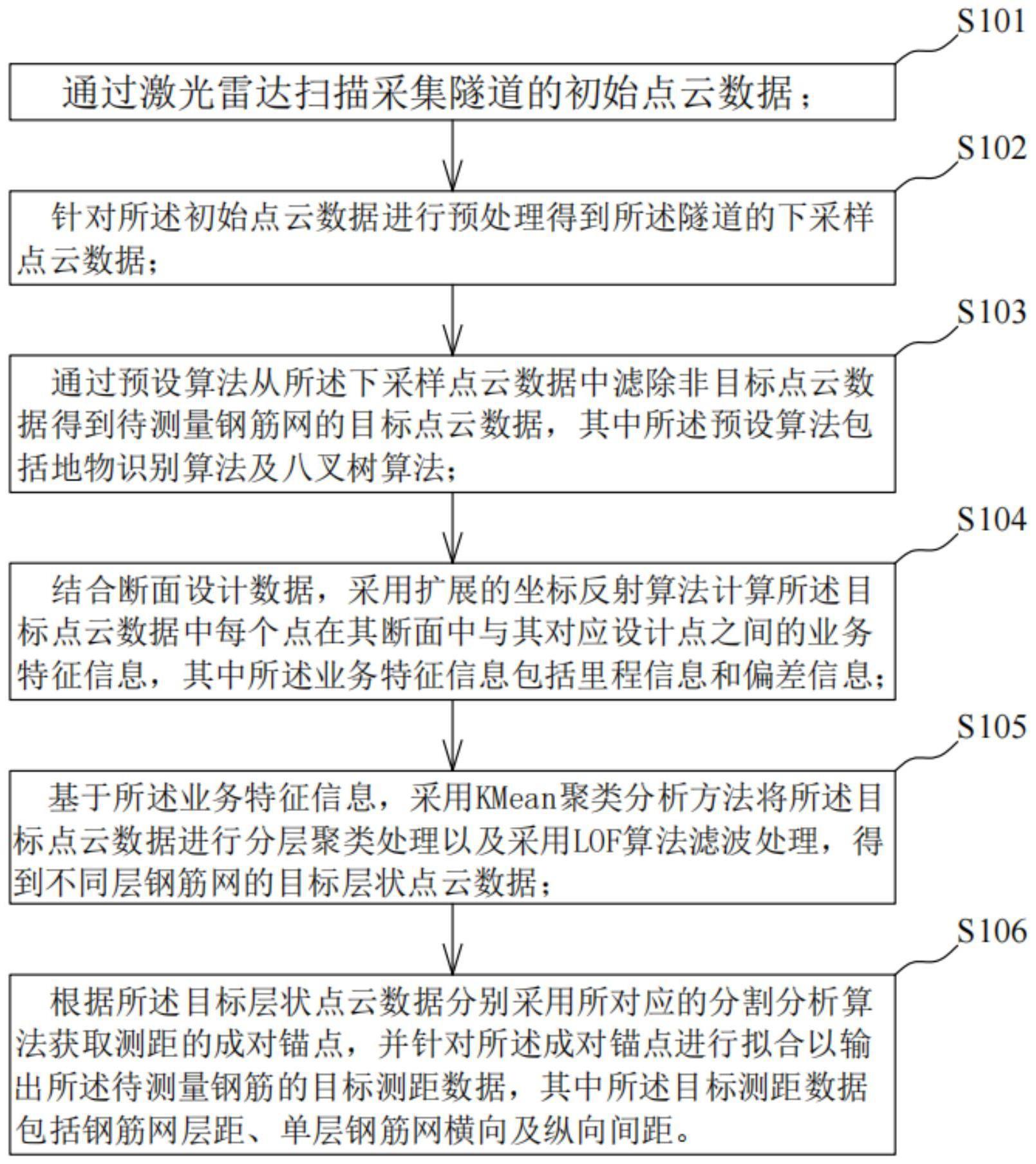
3、通过激光雷达扫描采集隧道的初始点云数据;
4、针对所述初始点云数据进行预处理得到所述隧道的下采样点云数据;
5、通过预设算法从所述下采样点云数据中滤除非目标点云数据得到待测量钢筋网的目标点云数据,其中所述预设算法包括地物识别算法及八叉树算法;
6、结合断面设计数据,采用扩展的坐标反射算法计算所述目标点云数据中每个点在其断面中与其对应设计点之间的业务特征信息,其中所述业务特征信息包括里程信息和偏差信息;
7、基于所述业务特征信息,采用kmean聚类分析方法将所述目标点云数据进行分层聚类处理以及采用lof算法滤波处理,得到不同层钢筋网的目标层状点云数据;
8、根据所述目标层状点云数据分别采用所对应的分割分析算法获取测距的成对锚点,并针对所述成对锚点进行拟合以输出所述待测量钢筋的目标测距数据,其中所述目标测距数据包括钢筋网层距、单层钢筋网横向及纵向间距。
9、较佳地,所述针对所述初始点云数据进行预处理得到所述隧道的下采样点云数据的步骤具体包括:
10、根据降采样方式选用适配的目标下采样方法;
11、基于所述目标下采样方法针对所述初始点云数据进行下采样处理,将所述初始点云数据转换至所述下采样处理所得到的下采样点云数据。
12、较佳地,所述目标下采样方法具体为均匀下采样方法或体素下采样方法。
13、较佳地,所述通过预设算法从所述下采样点云数据中滤除非目标点云数据得到待测量钢筋网的目标点云数据,其中所述预设算法包括地物识别算法及八叉树算法的步骤具体包括:
14、采用地物识别算法从所述下采样点云数据中剥离隧道地面的点云数据,得到保留点云数据;
15、通过八叉树算法计算所述保留点云数据的点云邻域范围,并基于所述点云邻域范围内的点间距方式过滤所述保留点云数据,得到待测量钢筋网的目标点云数据。
16、较佳地,所述结合断面设计数据,采用扩展的坐标反射算法计算所述目标点云数据中每个点在其断面中与其对应设计点之间的业务特征信息,其中所述业务特征信息包括里程信息和偏差信息的步骤具体包括:
17、根据预设定线数据,通过xy坐标计算所述目标点云数据中每个点在平面投影上最接近的线元;
18、根据线性空间计算点在对应所述线元的投影点至所述线元端点的投影距离;
19、根据所述线元端点的里程以及所述投影距离计算出所述目标点云数据中每个点对应的里程信息;
20、根据所述投影点的坐标计算出所述目标点云数据中每个点距离对应所述线元的水平偏差;
21、根据所述里程信息并结合所述定线数据中的竖曲线信息,计算出所述目标点云数据中每个点相对于对应定线的竖向偏移;
22、根据断面设计模型确定轴线在断面所处的二维位置,得到完整的业务特征信息。
23、较佳地,所述基于所述业务特征信息,采用kmean聚类分析方法将所述目标点云数据进行分层聚类处理以及采用lof算法滤波处理,得到不同层钢筋网的目标层状点云数据的步骤具体包括:
24、根据所述里程信息将所述目标点云数据进行切片处理得到点云切片数据;
25、通过针对所述偏差信息的kmean聚类分析,将所述点云切片数据进行分层处理得到不同层钢筋网的层状点云数据;
26、采用lof算法针对所述层状点云数据进行异常点的筛除处理,得到目标层状点云数据。
27、较佳地,所述分割分析算法包括基于隧道内壁平滑引起偏差变化平滑及偏差梯度均匀特性利于钢筋网层距的分割分析,以及基于单层钢筋网具有明显网状特征利于单层钢筋网横向及纵向间距的分割分析。
28、第二方面,本发明提供一种隧道钢筋网测距系统,包括:
29、采集模块,用于通过激光雷达扫描采集隧道的初始点云数据;
30、预处理模块,用于针对所述初始点云数据进行预处理得到所述隧道的下采样点云数据;
31、滤除模块,用于通过预设算法从所述下采样点云数据中滤除非目标点云数据得到待测量钢筋网的目标点云数据,其中所述预设算法包括地物识别算法及八叉树算法;
32、运算模块,用于结合断面设计数据,采用扩展的坐标反射算法计算所述目标点云数据中每个点在其断面中与其对应设计点之间的业务特征信息,其中所述业务特征信息包括里程信息和偏差信息;
33、分层聚类模块,用于采用kmean聚类分析方法将所述目标点云数据进行分层聚类处理以及采用lof算法滤波处理,得到不同层钢筋网的目标层状点云数据;
34、分割分析模块,用于根据所述目标层状点云数据分别采用所对应的分割分析算法获取测距的成对锚点,并针对所述成对锚点进行拟合以输出所述待测量钢筋的目标测距数据,其中所述目标测距数据包括钢筋网层距、单层钢筋网横向及纵向间距。
35、较佳地,所述预处理模块包括:
36、选用单元,用于根据降采样方式选用适配的目标下采样方法;
37、预处理单元,用于基于所述目标下采样方法针对所述初始点云数据进行下采样处理,将所述初始点云数据转换至所述下采样处理所得到的下采样点云数据。
38、较佳地,所述滤除模块包括:
39、剥离单元,用于采用地物识别算法从所述下采样点云数据中剥离隧道地面的点云数据,得到保留点云数据;
40、过滤模块,用于通过八叉树算法计算所述保留点云数据的点云邻域范围,并基于所述点云邻域范围内的点间距方式过滤所述保留点云数据,得到待测量钢筋网的目标点云数据。
41、较佳地,所述运算模块包括:
42、第一计算单元,用于根据预设定线数据,通过xy坐标计算所述目标点云数据中每个点在平面投影上最接近的线元;
43、第二计算单元,用于根据线性空间计算点在对应所述线元的投影点至所述线元端点的投影距离;
44、第三计算单元,用于根据所述线元端点的里程以及所述投影距离计算出所述目标点云数据中每个点对应的里程信息;
45、第四计算单元,用于根据所述投影点的坐标计算出所述目标点云数据中每个点距离对应所述线元的水平偏差;
46、第五计算单元,用于根据所述里程信息并结合所述定线数据中的竖曲线信息,计算出所述目标点云数据中每个点相对于对应定线的竖向偏移;
47、确定单元,用于根据断面设计模型确定轴线在断面所处的二维位置,得到完整的业务特征信息。
48、较佳地,所述分层聚类模块包括:
49、切片单元,用于根据所述里程信息将所述目标点云数据进行切片处理得到点云切片数据;
50、分层单元,用于通过针对所述偏差信息的kmean聚类分析,将所述点云切片数据进行分层处理得到不同层钢筋网的层状点云数据;
51、筛除单元,用于采用lof算法针对所述层状点云数据进行异常点的筛除处理,得到目标层状点云数据。
52、第三方面,本发明提供一种电子设备,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第一方面所述的隧道钢筋网测距方法。
53、第四方面,本实施例提供了一种存储介质,其上存储有计算机程序,该程序被处理器执行时实现如第一方面所述的隧道钢筋网测距方法。
54、相比于现有技术,本发明提供的一种隧道钢筋网测距方法、系统、电子设备及存储介质,通过将采集的隧道初始点云数据进行下采样预处理得到分布均匀的下采样点云数据;通过地物识别算法及八叉树算法滤除非目标点云数据得到待测量钢筋网的目标点云数据;结合断面设计数据,采用扩展的坐标反射算法计算目标点云数据中每个点在其断面中与其对应设计点之间的业务特征信息;采用kmean聚类分析方法将目标点云数据进行分层聚类处理以及采用lof算法滤波处理得到不同层钢筋网的目标层状点云数据;根据目标层状点云数据分别采用所对应的分割分析算法获取测距的成对锚点,并针对成对锚点进行拟合以输出待测量钢筋的目标测距数据。通过上述步骤过滤、分割点云数据将复杂的测距场景拆分为单一的测距目标的组合,针对每个测距目标仅关注其测量对象的局部特性,放弃其他复杂的语义信息,提高隧道钢筋网测距整体效率及分割精度,提升隧道钢筋网数据测量的准确性。
- 还没有人留言评论。精彩留言会获得点赞!