铲斗坐标标定方法和装置、更新方法和设备、挖掘机与流程
本公开涉及工程机械智能化领域,特别涉及一种铲斗坐标标定方法和装置、更新方法和设备、挖掘机。
背景技术:
1、相关技术挖掘机散状物料挖掘作业工况而言,希望通过感知设备来检测料堆大小及目标挖掘点位置,并将目标位置告知挖掘机,实现挖掘机无人化的自动挖掘作业。
技术实现思路
1、发明人通过研究发现:在挖掘机散状物料挖掘作业现场,通过激光雷达来检测料堆大小及目标挖掘点位置,其中激光雷达安装在挖掘机外侧。通过角度传感器来检测铲斗的位置,其中角度传感器安装在挖掘机上。通过铲斗轨迹规划和控制实现向目标挖掘点的自动挖掘作业功能。在这种场景下,要想实现精准挖掘,目标挖掘点的测量必须准确,而精确测量的前提是坐标标定,即将铲斗、目标挖掘点在雷达坐标系下的坐标准确标定到挖掘机坐标系下,实现铲斗坐标与目标挖掘点的坐标在挖掘机坐标系下的统一。
2、相关技术坐标标定常用的方法有:直接测量法、人工取点法、场景特征法等。相关技术这些方法还存在以下不足:直接测量法,标定精度低,直接测量和人工取点往往存在各种误差,包括人为操作带来的误差。
3、鉴于以上技术问题中的至少一项,本公开提供了一种铲斗坐标标定方法和装置、更新方法和设备、挖掘机,可以利用激光雷达和挖掘机角度传感器,在不增加外部标定设备的情况下对铲斗坐标进行标定。
4、根据本公开的一个方面,提供一种铲斗坐标标定方法,包括:
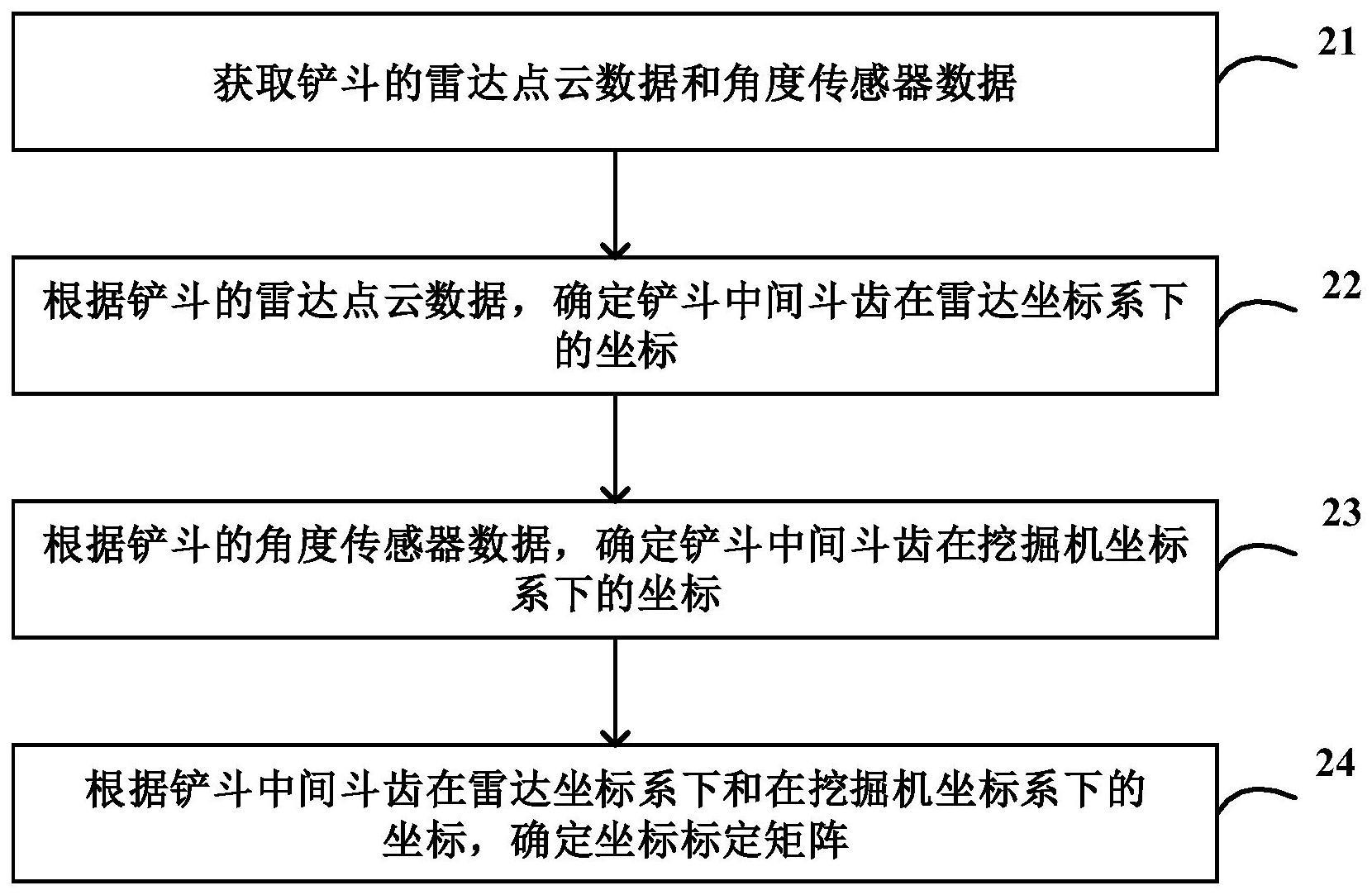
5、获取铲斗的雷达点云数据和角度传感器数据;
6、根据铲斗的雷达点云数据,确定铲斗中间斗齿在雷达坐标系下的坐标;
7、根据铲斗的角度传感器数据,确定铲斗中间斗齿在挖掘机坐标系下的坐标;
8、根据铲斗中间斗齿在雷达坐标系下和在挖掘机坐标系下的坐标,确定坐标标定矩阵,其中,所述坐标标定矩阵为铲斗中间斗齿在雷达系下的坐标标定到挖掘机坐标系的坐标标定矩阵。
9、在本公开的一些实施例中,所述获取铲斗的雷达点云数据和角度传感器数据包括:在铲斗处于多个不同位置下,采集铲斗的雷达点云数据和角度传感器数据。
10、在本公开的一些实施例中,所述根据铲斗的雷达点云数据,确定铲斗中间斗齿在雷达坐标系下的坐标包括:根据铲斗在每个空间位置采集的雷达点云数据,确定铲斗中间斗齿在雷达坐标系下的坐标。
11、在本公开的一些实施例中,所述根据铲斗的角度传感器数据,确定铲斗中间斗齿在挖掘机坐标系下的坐标包括:根据铲斗在每个空间位置采集的角度传感器数据,确定铲斗中间斗齿在挖掘机坐标系下的坐标。
12、在本公开的一些实施例中,所述根据铲斗在每个空间位置采集的雷达点云数据,确定铲斗中间斗齿在雷达坐标系下的坐标包括:根据铲斗在每个空间位置采集的雷达点云数据,基于隐式形状模型算法,确定铲斗中间斗齿在雷达坐标系下的坐标。
13、在本公开的一些实施例中,所述根据铲斗在每个空间位置采集的角度传感器数据,确定铲斗中间斗齿在挖掘机坐标系下的坐标包括:根据铲斗在每个空间位置采集的角度传感器数据,求得挖机装置运动学正解,确定铲斗中间斗齿在挖掘机坐标系下的坐标。
14、在本公开的一些实施例中,所述根据铲斗中间斗齿在雷达坐标系下和在挖掘机坐标系下的坐标,确定坐标标定矩阵包括:
15、根据铲斗中间斗齿在雷达坐标系下和在挖掘机坐标系下的坐标构建雷达坐标系坐标和挖掘机坐标系坐标的数据对,并将多个数据对划分为训练集和测试集;
16、根据训练集数据,确定坐标标定矩阵;
17、使用测试集数验证坐标标定矩阵。
18、在本公开的一些实施例中,所述坐标标定矩阵为坐标旋转平移变换矩阵。
19、在本公开的一些实施例中,所述根据训练集数据,确定坐标标定矩阵包括:
20、初始化相关参数,其中,所述相关参数包括迭代次数;
21、随机选择预定数量的第一数据对;
22、判断第一数据对是否共线;
23、在第一数据对不共线的情况下,采用直接线性变换确定坐标标定矩阵。
24、在本公开的一些实施例中,所述根据训练集数据,确定坐标标定矩阵还包括:
25、采用坐标标定矩阵,将第二数据对中的雷达坐标系坐标变换得到挖掘机坐标系坐标,其中,第二数据对为训练集中除第一数据对外的其它数据对;
26、计算变换得到的挖掘机坐标系坐标与实际挖掘机坐标系坐标的距离偏差;
27、判断距离偏差是否小于预定距离阈值;
28、根据迭代次数、预定距离阈值判断,记录符合条件的内点,更新坐标标定矩阵;
29、计算内点概率并根据内点概率更新迭代次数。
30、根据本公开的另一方面,提供一种坐标标定更新方法,包括:
31、判断坐标标定矩阵的在线误差是否大于预定许用误差;
32、若坐标标定矩阵的在线误差大于预定许用误差,则判断采集的位置点数据对数量是否达到预定位置点数量;
33、在采集的位置点数据对数量等于预定位置点数量的情况下,采用如上述任一实施例所述的铲斗坐标标定方法确定新的坐标标定矩阵;
34、对坐标标定矩阵进行更新。
35、在本公开的一些实施例中,所述坐标标定更新方法还包括:
36、在采集的位置点数据对数量小于预定位置点数量的情况下,采集铲斗雷达点云数据,确定铲斗中间斗齿在雷达坐标系下的1个坐标;
37、采集铲斗的角度传感器数据,确定铲斗中间斗齿在挖掘机坐标系下的1个坐标;
38、进行位置点数据对数量累计,之后再次执行判断采集的位置点数据对数量是否达到预定位置点数量的步骤。
39、在本公开的一些实施例中,所述确定铲斗中间斗齿在雷达坐标系下的1个坐标包括:基于隐式形状模型算法,得到铲斗中间斗齿在雷达坐标系下的1个坐标;判断模型相似度是否大于预定相似度;在模型相似度大于预定相似度的情况下,使用所述铲斗中间斗齿在雷达坐标系下的1个坐标。
40、在本公开的一些实施例中,所述确定铲斗中间斗齿在挖掘机坐标系下的1个坐标包括:基于角度传感器数据求得挖机装置运动学正解,确定铲斗中间斗齿在挖掘机坐标系下的1个坐标。
41、根据本公开的另一方面,提供一种铲斗坐标标定装置,包括:
42、数据获取模块,被配置为获取铲斗的雷达点云数据和角度传感器数据;
43、定位模块,被配置为根据铲斗的雷达点云数据,确定铲斗中间斗齿在雷达坐标系下的坐标;根据铲斗的角度传感器数据,确定铲斗中间斗齿在挖掘机坐标系下的坐标;
44、标定模块,被配置为根据铲斗中间斗齿在雷达坐标系下和在挖掘机坐标系下的坐标,确定坐标标定矩阵,其中,所述坐标标定矩阵为铲斗中间斗齿在雷达系下的坐标标定到挖掘机坐标系的坐标标定矩阵。
45、在本公开的一些实施例中,所述铲斗坐标标定装置用于执行实现如上述任一实施例所述的铲斗坐标标定方法的操作。
46、根据本公开的另一方面,提供一种坐标标定更新设备,包括:
47、判断装置,被配置为判断坐标标定矩阵的在线误差是否大于预定许用误差;在坐标标定矩阵的在线误差大于预定许用误差的情况下,判断采集的位置点数据对数量是否达到预定位置点数量;
48、铲斗坐标标定装置,被配置为在采集的位置点数据对数量等于预定位置点数量的情况下,采用铲斗坐标标定方法确定新的坐标标定矩阵;
49、更新装置,被配置为对坐标标定矩阵进行更新。
50、在本公开的一些实施例中,所述铲斗坐标标定装置为如上述任一实施例所述的铲斗坐标标定装置。
51、在本公开的一些实施例中,所述坐标标定更新设备用于执行实现如上述任一实施例所述的坐标标定更新方法的操作。
52、根据本公开的另一方面,提供一种计算机装置,包括:
53、存储器,用于存储指令;
54、处理器,用于执行所述指令,使得所述计算机装置执行实现如权上述任一实施例所述的铲斗坐标标定方法,和/或执行实现如上述任一实施例所述的坐标标定更新方法的操作。
55、根据本公开的另一方面,提供一种标定系统,包括激光雷达和角度传感器,还包括计算机装置、坐标标定更新设备和铲斗坐标标定装置中的至少一项,其中,所述计算机装置为如上述任一实施例所述的计算机装置,所述坐标标定更新设备为如上述任一实施例所述的坐标标定更新设备,所述铲斗坐标标定装置为如上述任一实施例所述的铲斗坐标标定装置。
56、根据本公开的另一方面,提供一种挖掘机,包括激光雷达,还包括计算机装置、坐标标定更新设备和铲斗坐标标定装置中的至少一项,其中,所述计算机装置为如上述任一实施例所述的计算机装置,所述坐标标定更新设备为如上述任一实施例所述的坐标标定更新设备,所述铲斗坐标标定装置为如上述任一实施例所述的铲斗坐标标定装置。
57、根据本公开的另一方面,提供一种计算机可读存储介质,其中,所述计算机可读存储介质存储有计算机指令,所述指令被处理器执行时实现如上述任一实施例所述的铲斗坐标标定方法,和/或实现如上述任一实施例所述的坐标标定更新方法的操作。
58、本公开可以利用激光雷达和挖掘机角度传感器,在不增加外部标定设备的情况下对铲斗坐标进行标定。
- 还没有人留言评论。精彩留言会获得点赞!