一种主被动雷达目标信息融合方法及装置与流程
本发明涉及雷达信息融合,尤其涉及一种主被动雷达目标信息融合方法及装置。
背景技术:
1、传统的雷达检测与跟踪一般采用纯主动式或纯被动式的单雷达系统检测方法,但纯主动式或纯被动式的单雷达探测系统,不能完整的、全面的描述传感器探测的目标信息,例如单纯的主动雷达探测时会出现工作于距离中分辨模式情况、目标姿态不利于径向分辨情况,单纯的被动雷达探测时会出现辐射源聚类与识别存在错误、角度测量存在随机误差和系统误差、搜索时间紧迫仅能获得单周期数据等情况。且单雷达探测系统容易受到干扰将虚假目标进行上报或跟踪,单雷达系统获取干扰或目标参数信息的实时性也较差,在快速变化的复杂电磁干扰环境中的抗干扰能力有限,上述均会影响雷达对真实目标的探测、判断与跟踪性能。
2、多传感器融合的目标综合置信度要远强于单传感器判决的置信度,现有技术中针对于不同传感器目标检测信息之间的融合,通常是采用简单的数据关联融合方式,即将不同传感器之间的目标点变换至同一坐标系后进行简单的匹配。但是由于传感器的精度、载体平台以及外部环境影响,会导致目标特征测量存在不确定性,同时还会存在单一特征难以高置信度确定目标类别属性的不确定性,这些不确定性均可能会导致信息融合时无法较好的描述综合目标可信度,使得不同传感器所提供的关于目标的报告发生冲突,传统基于简单数据关联融合方式的多传感器融合方法无法解决上述冲突问题,进而会严重降低目标跟踪精度、目标或干扰信息的辨识度。且主被动雷达传感器的结构和检测机理不同,两者所探测得到的目标信息不适宜进行简单的数据关联匹配,尤其是在复杂环境下通常难以取得较好的融合效果。
技术实现思路
1、本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种实现方法简单、融合效率以及精度高、抗干扰性强的主被动雷达目标信息融合方法及装置。
2、为解决上述技术问题,本发明提出的技术方案为:
3、一种主被动雷达目标信息融合方法,步骤包括:
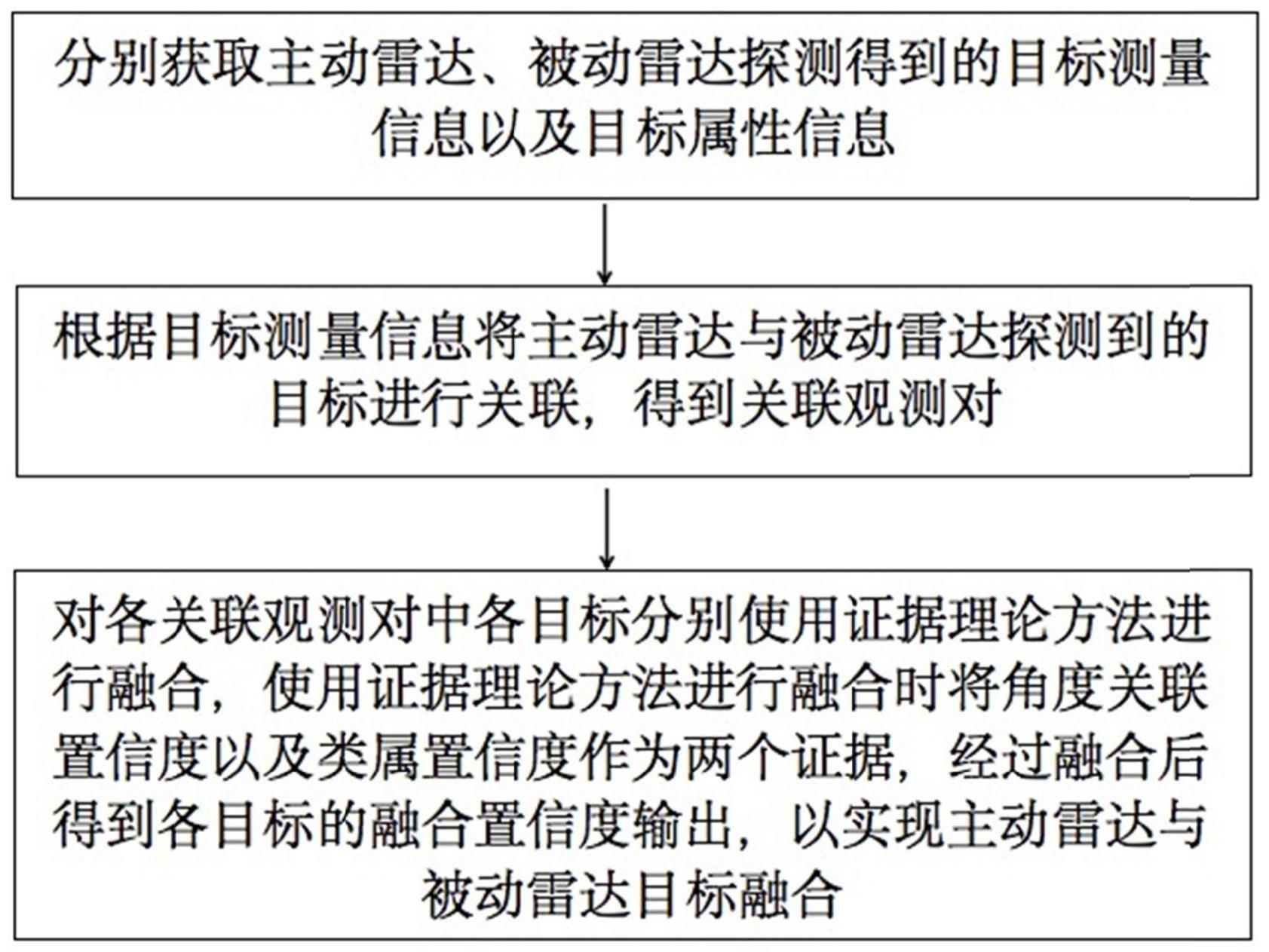
4、步骤s01.分别获取主动雷达、被动雷达探测得到的目标测量信息以及目标属性信息,所述目标属性信息包括类属置信度;
5、步骤s02.根据所述目标测量信息将主动雷达与被动雷达探测到的目标进行关联,得到关联观测对;
6、步骤s03.对各所述关联观测对中各目标分别使用证据理论方法进行融合,使用所述证据理论方法进行融合时将角度关联置信度以及所述类属置信度作为两个证据,经过融合后得到各目标的融合置信度输出,以实现主动雷达与被动雷达目标融合,所述角度关联置信度为根据主动雷达与被动雷达探测到的目标之间的角度偏差统计量变换得到。
7、进一步的,所述步骤s02中采用最近邻方法将主动雷达与被动雷达探测到的目标进行关联,采用所述最近邻方法进行关联时,通过不断循环寻找被动雷达与主动雷达的目标观测信息之间角度关联检测统计量最小的观测对,得到最佳关联观测对,所述角度关联检测统计量为根据主动雷达与被动雷达探测得到的目标观测信息之间角度偏差统计量构建得到。
8、进一步的,所述步骤s02中根据所述目标测量信息将主动雷达与被动雷达探测到的目标进行关联前还包括:根据主动雷达与被动雷达探测得到的目标测量信息中角度偏差统计量服从的分布状态,判断主动雷达与被动雷达探测到的目标是否为真实目标,其中若俯仰角偏差统计量与方位角偏差统计量之和服从自由度为2的中心化卡方分布,则判定对应的主动雷达与被动雷达探测到的目标均为真实目标。
9、进一步的,所述角度关联置信度的获取步骤包括:判断主动雷达与被动雷达探测到的目标之间角度偏差是否小于预设角度阈值;如果是则使用主动雷达与被动雷达探测到的目标之间的所述角度偏差统计量计算得到所述角度关联置信度,否则将所述角度关联置信度设置为0。
10、进一步的,所述角度关联置信度的计算表达式为:
11、
12、其中,为第i个主动雷达与第j个被动雷达之间的角度关联置信度,为第i个主动雷达与第j个被动雷达之间的角度关联检测统计量,所述角度关联检测统计量为主动雷达与被动雷达之间俯仰角偏差统计量与方位角偏差统计量的平方和,为第i个主动雷达探测得到的俯仰角、方位角,为第j个主动雷达探测得到的俯仰角、方位角,λθ为预设角度阈值。
13、进一步的,所述步骤s03中使用证据理论方法进行融合的过程中,,通过执行多周期的融合处理确定出所有目标的所述融合置信度,其中如果主动雷达与被动雷达证据之间的互支持度值c超过预设支持度阈值h,则通过对将角度关联置信度以及所述类属置信度两个证据进行ds融合获得对应周期的融合置信度,否则从主动雷达与被动雷达中选取与前一周期证据之间的互支持度较大的目标雷达的置信度作为对应周期的置信度。
14、进一步的,所述将角度关联置信度以及所述类属置信度两个证据进行ds融合具体按照下式计算出所述融合置信度:
15、
16、其中,m(ap)为角度关联置信度dobpos对应的证据ma与类属置信度dobcc对应的证据mp之间的融合置信度,c(ma,mp)为证据ma与证据mp之间的互支持度值。
17、进一步的,所述步骤s03使用证据理论方法进行融合的具体步骤包括:
18、步骤s301.计算主动雷达与被动雷达证据之间的互支持度值c;
19、步骤s302.如果当前周期为首周期,判断所述互支持度值c是否大于预设支持度阈值h,如果是则对当前周期证据进行ds融合得到当前周期的融合置信度,转入步骤s304,否则计算当前证据的均值后返回执行步骤s301;如果当前周期为非首周期,判断所述互支持度值c是否大于预设支持度阈值h,如果是则对当前周期证据进行ds融合得到当前周期的融合置信度后转入步骤s304,否则转入步骤s303;
20、步骤s303.分别计算主动雷达、被动雷达当前周期的证据与前一时刻各证据之间的整体距离,从主动雷达与被动雷达中选择与前一时刻置信度距离较小的目标雷达的证据作为当前周期的融合置信度;
21、步骤s304.计算当前周期与前多个历史周期的证据之间的互持度矩阵,所述互持度矩阵中每行对应为所有证据体对各证据体的支持度的集合;
22、步骤s305.根据所述互持度矩阵计算当前周期的融合权重值;
23、步骤s306.根据所述融合权重值计算加权平均证据体;
24、步骤s307.重复执行步骤s301~步骤s306以执行多个周期处理后,得到各目标的融合置信度结果输出。
25、一种主被动雷达目标信息融合装置,包括:
26、信息获取模块,用于分别获取主动雷达、被动雷达探测得到的目标测量信息以及目标属性信息,所述目标属性信息包括类属置信度;
27、目标关联模块,用于根据所述目标测量信息将主动雷达与被动雷达探测到的目标进行关联,得到关联观测对;
28、目标融合模块,用于对各所述关联观测对中各目标分别使用证据理论方法进行融合,使用所述证据理论方法进行融合时将角度关联置信度以及所述类属置信度作为两个证据,经过融合后得到各目标的融合置信度输出,以实现主动雷达与被动雷达目标融合,所述角度关联置信度为根据主动雷达与被动雷达探测到的目标之间的角度偏差统计量变换得到。
29、一种主被动雷达目标信息融合装置,包括处理器以及存储器,所述存储器用于存储计算机程序,所述处理器用于执行所述计算机程序以执行如上述方法。
30、与现有技术相比,本发明的优点在于:
31、1、本发明通过先根据目标测量信息将主动雷达与被动雷达探测到的目标进行关联,然后再使用d-s证据理论对主被动雷达信息进行融合,使用d-s证据理论进行融合过程中,将角度关联置信度以及类属置信度作为两个证据,融合得到融合置信度,以充分融合主被动雷达探测信息之间的角度关联层面的置信度以及类属层面的置信度来确定出融合置信度,使得可以准确、灵活描述检测信息可信度,为各探测目标能够确定出准确的置信度,解决主被动雷达对检测目标产生的冲突、不确定性问题,从而有效提高目标跟踪检测的精度,保持对目标或干扰信息的历史分类连贯性,提高目标或干扰信息的辨识度,进而利于后续执行有效的目标选择与切换决策。
32、2、本发明通过执行多个周期的ds融合处理,计算多个周期的互支持度矩阵、证据权值,然后分配到每个周期中计算加权平均证据,对各个周期的加权证据进行多周期的ds融合,输出多个周期的融合结果,实现多周期的ds融合处理,采用多周期性置信度融合、多证据体距离衡量、多相互支持度统计综合的方式解决主被动雷达证据发生冲突时的融合问题,强化融合效果,使得当主被动雷达对目标的判决基本一致时,能够显著增强融合判决的置信度,当主被动雷达对目标的判决存在较大冲突时,能够有效结合d-s证据理论通过多个周期融合处理实现主被动雷达信息有效融合。
33、3、本发明进一步利用主被动雷达传感器的结构和检测机理不同,以及主被动雷达在同一时刻观测到的干扰、杂波和噪声分布一般不同且不相关,而实际目标同时可观测且量测一致的特性,通过构建角度偏差统计量对主被动雷达的检测信息进行关联,可以快速、有效的鉴别干扰,滤除掉杂波、干扰以及噪声等虚假目标。
- 还没有人留言评论。精彩留言会获得点赞!