激光雷达的回波数据的降噪方法、装置及激光雷达与流程
本技术属于雷达,尤其涉及一种激光雷达的回波数据的降噪方法、装置、激光雷达及计算机可读存储介质。
背景技术:
1、随着激光雷达、毫米波雷达的兴起,各类雷达设备已经广泛应用在机器人、车辆等设备中,以通过雷达设备进行测距、目标检测等。比如,激光雷达可以通过测定激光发射器与目标物体之间的传播距离,分析目标物体表面的反射能量大小、反射波谱的幅度、频率和相位等信息,从而呈现出目标物体精确的三维结构信息。
2、相关技术中,通常使用硅光电倍增管(silicon photomultiplier,sipm)作为激光雷达的接收传感器,其特点是接收灵敏度高,但是容易收到环境光(主要是太阳光)的影响,从而导致激光雷达获取到的回波数据的信噪比较低,进而影响了激光雷达的探测准确性。
技术实现思路
1、本技术实施例提供了一种激光雷达的回波数据的降噪方法、装置、激光雷达及计算机可读存储介质,可以解决使用sipm作为激光雷达的接收传感器时,容易收到环境光(主要是太阳光)的影响,从而导致激光雷达获取到的回波数据的信噪比较低,进而影响了激光雷达的探测准确性的问题。
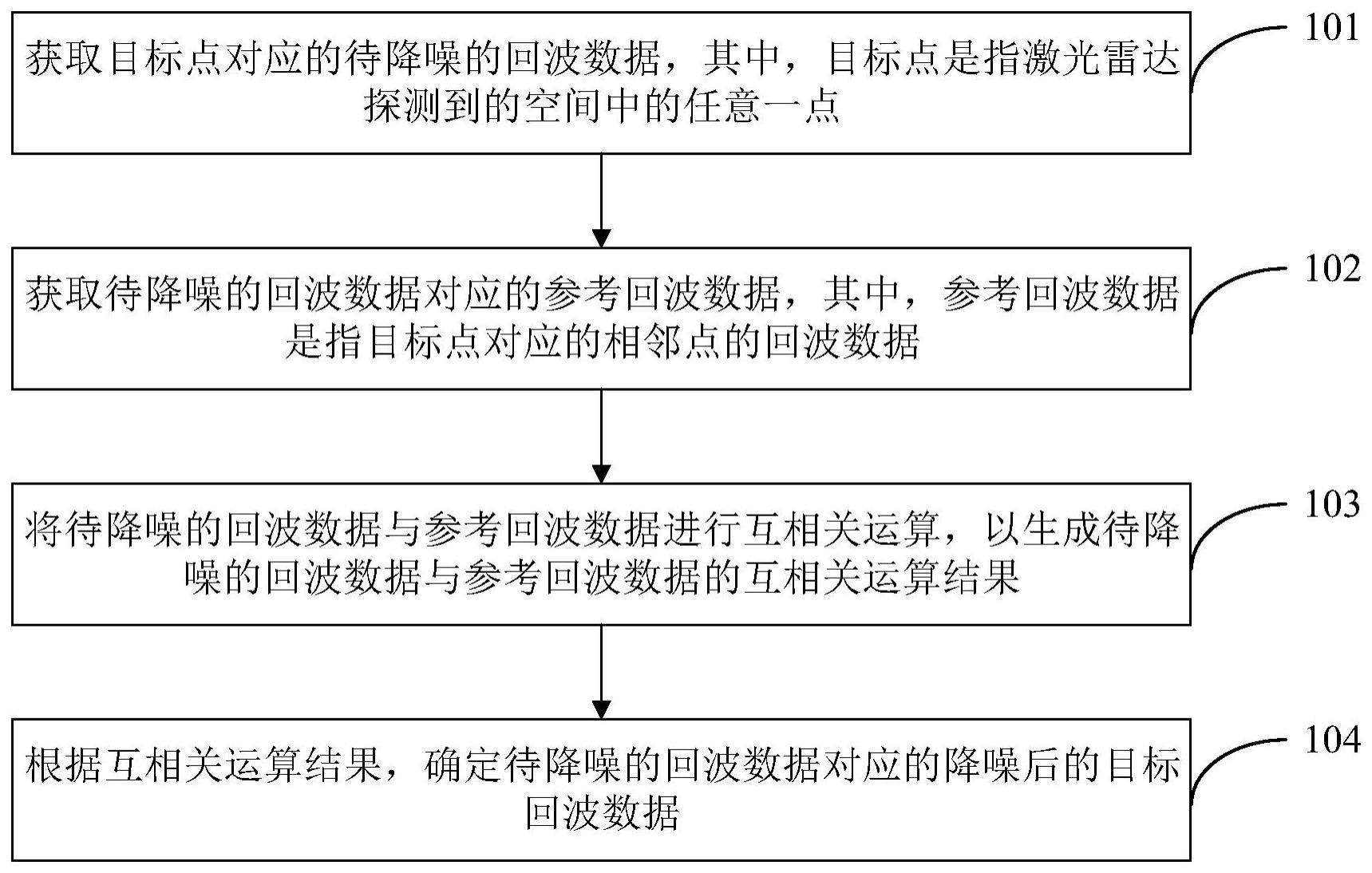
2、第一方面,本技术实施例提供了一种激光雷达的回波数据的降噪方法,包括:获取目标点对应的待降噪的回波数据,其中,目标点是指激光雷达探测到的空间中的任意一点;获取待降噪的回波数据对应的参考回波数据,其中,参考回波数据是指目标点对应的相邻点的回波数据;将待降噪的回波数据与参考回波数据进行互相关运算,以生成待降噪的回波数据与参考回波数据的互相关运算结果;根据互相关运算结果,确定待降噪的回波数据对应的降噪后的目标回波数据。
3、在第一方面的一种可能的实现方式中,上述获取待降噪的回波数据对应的参考回波数据,包括:
4、确定目标点对应的目标线数和目标序号;
5、根据目标点对应的目标线数和目标序号,确定目标点对应的至少一个相邻点;
6、将至少一个相邻点的回波数据确定为至少一个参考回波数据。
7、可选的,在第一方面另一种可能的实现方式中,上述参考回波数据的数量为1;相应的,上述根据目标点对应的目标线数和目标序号,确定目标点对应的至少一个相邻点,包括:
8、将目标线数中与目标点相邻的任意一个点,确定为相邻点;
9、或者,
10、确定与目标线数相邻的任意一个相邻线数;
11、将任意一个相邻线数中序号与目标序号相同的点,确定为相邻点。
12、可选的,在第一方面再一种可能的实现方式中,上述根据互相关运算结果,确定待降噪的回波数据对应的降噪后的目标回波数据,包括:
13、将互相关运算结果,确定为目标回波数据。
14、可选的,在第一方面又一种可能的实现方式中,上述参考回波数据的数量为多个;相应的,上述根据目标点对应的目标线数和目标序号,确定目标点对应的至少一个相邻点,包括:
15、将目标线数中与目标点相邻的各个点,确定为相邻点;
16、或者,
17、确定与目标线数相邻的各个相邻线数;
18、将各个相邻线数中序号与目标序号相同的点,确定为相邻点。
19、可选的,在第一方面又一种可能的实现方式中,上述参考回波数据的数量为多个;相应的,上述根据目标点对应的目标线数和目标序号,确定目标点对应的至少一个相邻点,包括:
20、将目标线数中与目标点相邻的各个点,确定为相邻点;
21、确定与目标线数相邻的各个相邻线数;
22、将各个相邻线数中序号与目标序号相同的点,确定为相邻点。
23、可选的,在第一方面另一种可能的实现方式中,上述参考回波数据的数量为多个;相应的,上述将待降噪的回波数据与参考回波数据进行互相关运算,以生成待降噪的回波数据与参考回波数据的互相关运算结果,包括:
24、对待降噪的回波数据与每个参考回波数据依次进行互相关运算,以生成待降噪的回波数据与每个参考回波数据的互相关运算结果。
25、可选的,在第一方面再一种可能的实现方式中,上述根据互相关运算结果,确定待降噪的回波数据对应的降噪后的目标回波数据,包括:
26、将各个互相关运算结果的均值,确定为目标回波数据。
27、可选的,在第一方面又一种可能的实现方式中,上述根据互相关运算结果,确定待降噪的回波数据对应的降噪后的目标回波数据,包括:
28、确定每个互相关运算结果对应的信噪比;
29、将信噪比最大的互相关运算结果,确定为目标回波数据。
30、可选的,在第一方面又一种可能的实现方式中,上述互相关运算结果为电压与时间的对应关系;相应的,上述确定每个互相关运算结果对应的信噪比,包括:
31、根据预设的电压阈值,确定每个互相关运算结果中包括的有效数据及有效数据的前沿值;
32、将每个互相关运算结果中处于前沿值之前的波形数据,分别确定为每个互相关运算结果对应的噪声数据;
33、将每个互相关运算结果中包括的有效数据与噪声数据的信噪比,分别确定为每个互相关运算结果对应的信噪比。
34、可选的,在第一方面另一种可能的实现方式中,上述将待降噪的回波数据与参考回波数据进行互相关运算,以生成待降噪的回波数据与参考回波数据的互相关运算结果之前,还包括:
35、获取所述激光雷达中的模拟数字转换器的采样时间间隔;
36、根据采样时间间隔,确定互相关运算采用的步距。
37、第二方面,本技术实施例提供了一种激光雷达的回波数据的降噪装置,包括:第一获取模块,用于获取目标点对应的待降噪的回波数据,其中,目标点是指激光雷达探测到的空间中的任意一点;第二获取模块,用于获取待降噪的回波数据对应的参考回波数据,其中,参考回波数据是指目标点对应的相邻点的回波数据;互相关运算模块,用于将待降噪的回波数据与参考回波数据进行互相关运算,以生成待降噪的回波数据与参考回波数据的互相关运算结果;第一确定模块,用于根据互相关运算结果,确定待降噪的回波数据对应的降噪后的目标回波数据。
38、在第二方面的一种可能的实现方式中,上述第二获取模块,包括:
39、第一确定单元,用于确定目标点对应的目标线数和目标序号;
40、第二确定单元,用于根据目标点对应的目标线数和目标序号,确定目标点对应的至少一个相邻点;
41、第三确定单元,将至少一个相邻点的回波数据确定为至少一个参考回波数据。
42、可选的,在第二方面另一种可能的实现方式中,上述参考回波数据的数量为1;相应的,上述第二确定单元,具体用于:
43、将目标线数中与目标点相邻的任意一个点,确定为相邻点;
44、或者,
45、确定与目标线数相邻的任意一个相邻线数;
46、将任意一个相邻线数中序号与目标序号相同的点,确定为相邻点。
47、可选的,在第二方面再一种可能的实现方式中,上述第一确定模块,包括:
48、第四确定单元,用于将互相关运算结果,确定为目标回波数据。
49、可选的,在第二方面又一种可能的实现方式中,上述参考回波数据的数量为多个;相应的,上述第二确定单元,还用于:
50、将目标线数中与目标点相邻的各个点,确定为相邻点;
51、或者,
52、确定与目标线数相邻的各个相邻线数;
53、将各个相邻线数中序号与目标序号相同的点,确定为相邻点。
54、可选的,在第二方面又一种可能的实现方式中,上述参考回波数据的数量为多个;相应的,上述第二确定单元,还用于:
55、将目标线数中与目标点相邻的各个点,确定为相邻点;
56、确定与目标线数相邻的各个相邻线数;
57、将各个相邻线数中序号与目标序号相同的点,确定为相邻点。
58、可选的,在第二方面另一种可能的实现方式中,上述参考回波数据的数量为多个;相应的,上述互相关运算模块,包括:
59、互相关运算单元,用于对待降噪的回波数据与每个参考回波数据依次进行互相关运算,以生成待降噪的回波数据与每个参考回波数据的互相关运算结果。
60、可选的,在第二方面再一种可能的实现方式中,上述第一确定模块,包括:
61、第五确定单元,用于将各个互相关运算结果的均值,确定为目标回波数据。
62、可选的,在第二方面又一种可能的实现方式中,上述第一确定模块,包括:
63、第六确定单元,用于确定每个互相关运算结果对应的信噪比;
64、第七确定单元,用于将信噪比最大的互相关运算结果,确定为目标回波数据。
65、可选的,在第二方面又一种可能的实现方式中,上述互相关运算结果为电压与时间的对应关系;相应的,上述第六确定单元,具体用于:
66、根据预设的电压阈值,确定每个互相关运算结果中包括的有效数据及有效数据的前沿值;
67、将每个互相关运算结果中处于前沿值之前的波形数据,分别确定为每个互相关运算结果对应的噪声数据;
68、将每个互相关运算结果中包括的有效数据与噪声数据的信噪比,分别确定为每个互相关运算结果对应的信噪比。
69、可选的,在第二方面另一种可能的实现方式中,上述装置,还包括:
70、第三获取模块,用于获取所述激光雷达中的模拟数字转换器的采样时间间隔;
71、第二确定模块,用于根据采样时间间隔,确定互相关运算采用的步距。
72、第三方面,本技术实施例提供了一种激光雷达,包括:存储器、处理器以及存储在存储器中并可在处理器上运行的计算机程序,其中,处理器执行计算机程序时实现如前所述的激光雷达的回波数据的降噪方法。
73、第四方面,本技术实施例提供了一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如前所述的激光雷达的回波数据的降噪方法。
74、第五方面,本技术实施例提供了一种计算机程序产品,当计算机程序产品在激光雷达上运行时,使得激光雷达执行如前所述的激光雷达的回波数据的降噪方法。
75、本技术实施例与现有技术相比存在的有益效果是:由于激光雷达探测到的相邻点之间的距离通常极近,因此相邻点在空间中的位置特征以及与激光雷达之间的距离等特征通常也极为相似,从而相邻点对应的有效回波数据也是极为相似的,因此通过将待降噪的回波数据与相邻点的回波数据进行互相关运算,可以将待降噪的回波数据中的有效回波数据和噪声数据进行分离,从而实现对回波数据的降噪,提升了回波数据的信噪比,进而改善了激光雷达的探测准确性。
- 还没有人留言评论。精彩留言会获得点赞!