一种角度传感器线性度测试方法与流程
本发明涉及传感器,特别是一种角度传感器线性度测试方法。
背景技术:
1、21世纪是迈向信息化社会的崭新阶段,而传感器技术是现代技术的应用中具有巨大发展潜力技术之一,传感器广泛应用于医疗设备、航海、实验仪器、数字水平仪、汽车等多个领域,也广泛应用于工业、机械、军用等多个场合。传感器种类繁多,而角度传感器是其中的一种,它主要用来测量转动部件和固定部件之间的角度变化,角度是一种重要的物理量,它们的精度对产品的质量有着至关重要的作用,所以对角度传感器的测试研究至关重要。
技术实现思路
1、针对现有技术的缺陷,本发明提供了一种角度传感器线性度测试方法。
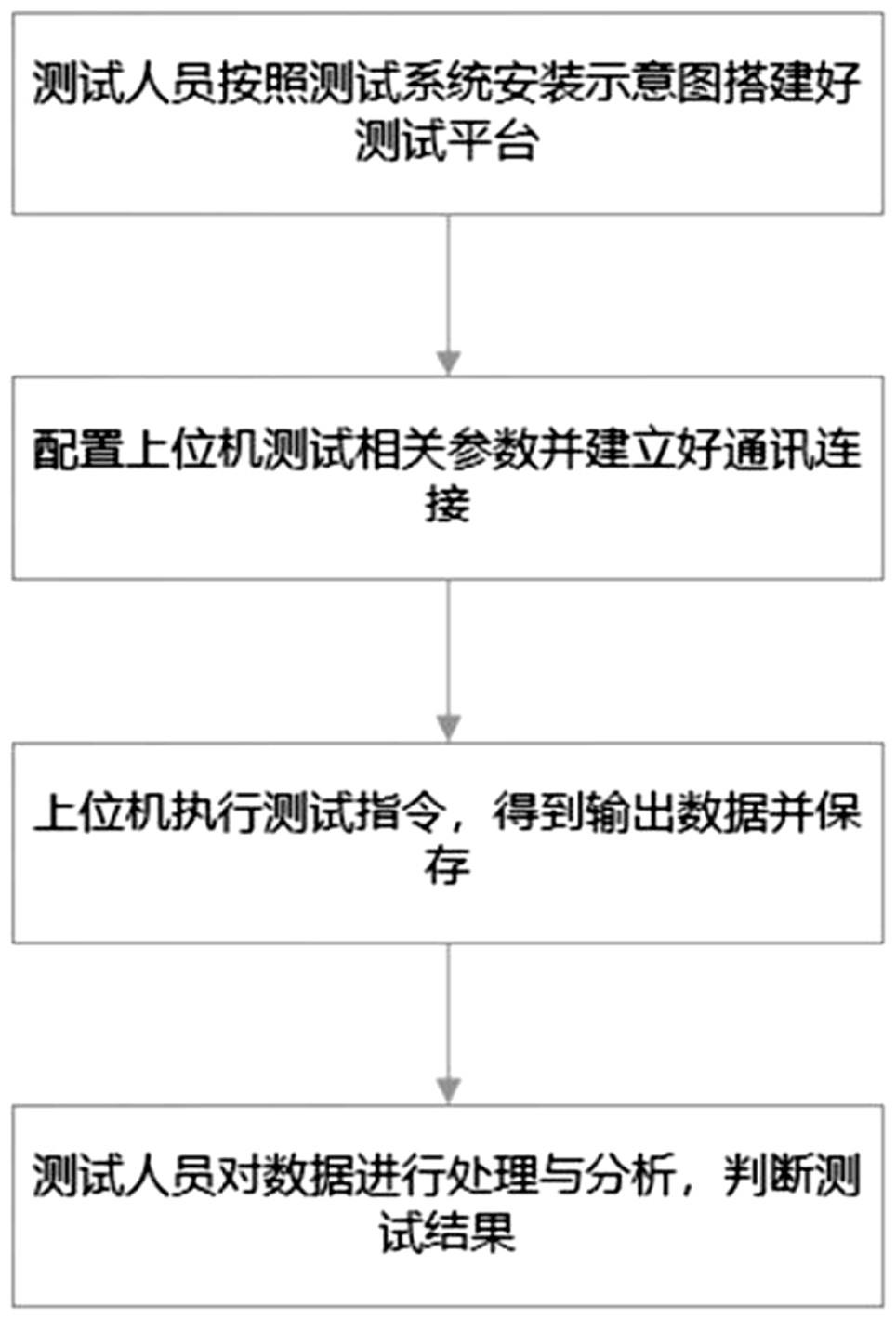
2、一种角度传感器线性度测试方法,包括以下步骤:s100:获取所述角度传感器的理论线性方程;s200:通过测试系统获取所述角度传感器输出量的实际值;s300:根据所述实测值与角度间的对应关系,通过最小二乘法进行直线拟合,获得实际线性方程;s400:根据所述理论线性方程与实际线性方程得到所述角度传感器的线性度。
3、可选的,所述角度传感器为编码器;所述步骤s100包括读取角度传感器零点的输出量,将此点作为起点;所述线性度测试系统包括pc端上位机,所述pc端上位机分别与信号发生装置和数据采集装置相连,所述信号发生装置连接驱动装置,通过所述驱动装置驱动步进电机运转,所述步进电机与所述角度传感器刚性同轴连接,数据采集装置用于采集所述角度传感器的输出;所述上位机通过控制信号发生装置输出的脉冲信号来控制所述步进电机的转动,根据所述角度传感器的量程以及单个量程内测量点的数量,确定所述步进电机每走一步旋转的度数,从而按照信号发生装置中控制器的设置,控制步进电机的转动;所述线性度表示如下:
4、
5、式中:δymax——传感器校准曲线与拟合直线间的最大偏差;
6、y——理论满量程输出。
7、进一步的,所述理论线性方程为y=k1*x+b1;所述实际线性方程为y=k2*x+b2;通过理论线性方程与实际线性方程得到δymax=(k1-k2)*xi+(b1-b2),当(k1-k2)与(b1-b2)符号相同时,xi为xmax,当(k1-k2)与(b1-b2)符号相异时,xi为xmi n;y=(ymax-ymi n),将δymax与y的值带入到公式(1)后,得到角度传感器的最终线性度§。
8、本发明的有益效果是:本发明专利可以实现对角度传感器线性度的半自动测试,只需处理分析测试数据,测试时长可以缩短,线性度能更直接的反映出角度传感器产品的精度问题及输出量稳定程度。
技术特征:
1.一种角度传感器线性度测试方法,其特征在于,包括以下步骤:
2.根据要求1所述的测试方法,其特征在于,所述角度传感器为编码器。
3.根据要求1所述的测试方法,其特征在于,所述步骤s100包括读取角度传感器零点的输出量,将此点作为起点。
4.根据要求1所述的测试方法,其特征在于,所述线性度测试系统包括pc端上位机,所述pc端上位机分别与信号发生装置和数据采集装置相连,所述信号发生装置连接驱动装置,通过所述驱动装置驱动步进电机运转,所述步进电机与所述角度传感器刚性同轴连接,数据采集装置用于采集所述角度传感器的输出。
5.根据要求4所述的测试方法,其特征在于,所述上位机通过控制信号发生装置输出的脉冲信号来控制所述步进电机的转动,根据所述角度传感器的量程以及单个量程内测量点的数量,确定所述步进电机每走一步旋转的度数,从而按照信号发生装置中控制器的设置,控制步进电机的转动。
6.根据要求1所述的测试方法,其特征在于,所述线性度表示如下:
7.根据要求6所述的测试方法,其特征在于,所述理论线性方程为y=k1*x+b1。
8.根据要求7所述的测试方法,其特征在于,所述实际线性方程为y=k2*x+b2。
9.根据要求8所述的测试方法,其特征在于,通过理论线性方程与实际线性方程得到δymax=(k1-k2)*xi+(b1-b2),当(k1-k2)与(b1-b2)符号相同时,xi为xmax,当(k1-k2)与(b1-b2)符号相异时,xi为xmin;y=(ymax-ymin),将δymax与y的值带入到公式(1)后,得到角度传感器的最终线性度§。
技术总结
本发明公开了一种角度传感器线性度测试方法,包括以下步骤:S100:获取所述角度传感器的理论线性方程;S200:通过测试系统获取所述角度传感器输出量的实际值;S300:根据所述实测值与角度间的对应关系,通过最小二乘法进行直线拟合,获得实际线性方程;S400:根据所述理论线性方程与实际线性方程得到所述角度传感器的线性度。本发明可以实现对角度传感器线性度的半自动测试。
技术研发人员:杨琴,熊朝阳,黎展名,刘智磊,邓政
受保护的技术使用者:湖南航天磁电有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!