激光雷达测风距离门自适应调节方法与流程
1.本发明涉及激光雷达测风领域,具体涉及激光雷达测风距离门自适应调节方法。
背景技术:
2.激光雷达以激光为媒介,运动的气溶胶颗粒会使反射波发生多普勒频移,从而计算出风速和风向信息。由于其具有高时空分辨率、安装简单易维护、自动化程度高等优势,激光测风雷达已被广泛应用于各个领域,如环境气象监测、航空气象和风场监测等。
3.利用相干测风激光雷达测量风速的具体方案是:激光测风雷达的激光器产生信号光通过光学天线和扫描机构发射到待测空气中,与其中的气溶胶颗粒作用产生包含其速度信息的后向散射信号。通过多普勒原理,利用回波信号的多普勒频移与气溶胶颗粒运动速度(即风速)成正比,具体公式如下:,其中:v为风速,λ为波长,fd为多普勒频移。所以光学天线接收到的后向散射信号通过和系统内光纤激光器产生的本振光拍频和数字解调,即可处理得到径向风速。脉冲相干激光雷达在测风时,以时间为依据,根据不同距离处的气溶胶的回光时间来判断距离,形成不同的距离门,所以激光雷达就能探测不同距离处的风速与风向信息。
4.当前技术只提供了人为固定下发设置距离门的方式,无法对复杂风场剧烈变化的风况进行适当的距离门调节。
5.我司现有专利:激光雷达测风距离门的自动调节方法,中国专利授权公告号:cn110988905b,授权公告日:2021年8月20日,公开了一种激光雷达测风距离门的自动调节方法,包括:s1、以自定义模式设置距离门值并采集对应位置的风速数据的原始数据;s2、将按照距离门采集的原始数据反演为风速数据;s3、以各距离门对应的风速数据作为输入,联合算法进行计算,获得最新的距离门值,并返回给s1修正重复执行s1-s3;s4、显示风速数据。当前现有技术只能够按照人工设定的距离门采集数据,而自定义设置距离门可以有效的在风况复杂的位置,投入更多的测量资源,使得测量的数据更加精准,符合测风激光雷达精准测风的要求;不足之处:只考虑相邻距离门的风速差,以风速差作为判定距离设置是否合理,忽略相邻距离门的距离差。
技术实现要素:
6.为解决现有技术的不足,本发明的目的在于提供一种激光雷达测风距离门自适应调节方法。
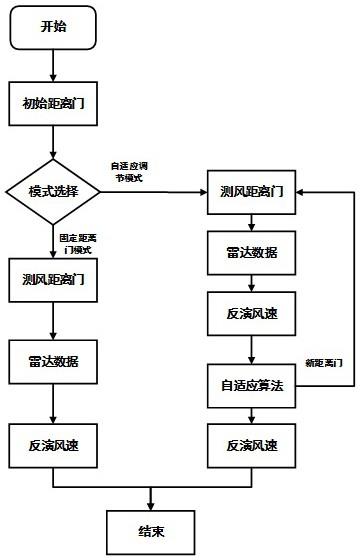
7.为了实现上述目标,本发明采用如下的技术方案:激光雷达测风距离门自适应调节方法,包括以下具体步骤:s1、设定距离门初始值;s2、选择距离门调节模式,所述调节模式包括固定距离门模式和自适应调节模式;s3、选择固定距离门模式或自适应调节模式进行激光雷达测风。
8.所述自适应调节模式包括以下具体步骤:s01、采集初始距离门对应位置的风速数据作为原始数据,即通过激光雷达的望远镜采集初始距离门处的光电信号,利用回光的光
电信号与出光信号进行拍频;s02、按照s01采集的原始数据反演成风速,即可编程的逻辑列阵fpga利用傅里叶变换算法将s01中的光电信号进行频域变换;s03、将s02反演风速作为自适应算法输入源,通过自适应算法建立距离差和风速相似性的关系模型;s04、通过关系模型对初始距离门进行修正,得到新的距离门,即新的距离门代替初始距离门;s05、重复s01-s04。
9.作为本发明的进一步优选,所述步骤s02的具体步骤如下:s02.1、对拍频后的数据进行傅里叶变化,即将时域信号转化成频域信号,其计算方法如下所示:,其中,为频率信号,为时域信号,为频率,t为时间,为复数基;s02.2、利用周期图法对获得频域信号进行累加,其公式如下所示:,其中, n为累加次数,为频率信号,为频域信号的频率,为功率谱,为功率谱的频率,累加后的频域信号呈现开口向下的抛物线,而峰值处的频率值为多普勒频移;s02.3、利用一阶差分法寻找峰值点i的频率,一阶差分公式为:;s02.4、根据,其中峰值点i对应的频率为多普勒频移fd;s02.5、利用计算出风速v,其中λ为波长;从而将频率信号数转为各个对应距离门的风速数据。
10.作为本发明的进一步优选,所述步骤s03的具体步骤如下:s03.1、累积每个距离门s分钟内的风速数据,其中任意一个距离门表示为:,其中第j个风速表示为,n个距离门的风速集合为,其中第i个距离门表示为,表示第i个距离门中第j时刻的风速;s03.2、计算相邻两个距离门之间的风速数据相关性pi:,其中为第i距离门的平均风速;s03.3、计算相邻距离门之间的间隔,距离门集合表示:,集合中的任意一距离门用表示,则相邻距离门之间的间隔差为;s03.4、通过风速数据相关性pi和相邻距离门之间的间隔差计算得出相关性距离函数ri,,形成相邻距离门之间的相关性距离函数集合;s03.5、计算相关性距离函数的均值。
11.作为本发明的进一步优选,所述步骤s04的具体步骤如下:s04.1、修正距离门的阈值,;s04.2、判断相关性距离函数ri是否大于距离门的阈值;s04.3、若ri>,则更新距离门;s04.4、若ri≤,则保持现有的距离门不改变。
12.作为本发明的进一步优选,所述更新距离门为在ri>时,在第i和第i+1的距离门之间增加距离门,增加的距离门取相邻距离门值的均值,,表示第i个距离门值,表示第i+1个距离门值,当增加距离门后,增加的距离门代替表示的距离门,形成新的距离门。
13.作为本发明的进一步优选,所述固定距离门模式包括以下具体步骤:s01、采集对
应距离门的原始风速数据;s02、照距离门采集的原始数据反演成风速。
14.本发明的有益之处在于:本发明通过根据风速调节距离门的密度,在风况复杂的位置,加入更多的测量距离门,从而增加了在风况复杂位置处的测量数据量,使得测量的风速数据增多,提高了测风激光雷达测风的精准度;通过自适应调节距离门,拓展了测风激光雷达的应用范围。
附图说明
15.图1是激光雷达测风的流程示意图;图2是自适应算法流程示意图;图3是自适应距离门调整示意图。
具体实施方式
16.以下结合附图和具体实施例对本发明作具体的介绍。
17.实施例一:结合图1,激光雷达测风距离门自适应调节方法,包括以下具体步骤:s1、设定距离门初始值。
18.s2、选择距离门调节模式,所述调节模式包括固定距离门模式和自适应调节模式。
19.s3、选择固定距离门模式或自适应调节模式进行激光雷达测风。
20.当选择固定距离门模式时:上位机将用户配置的距离门值发送给可编程的逻辑列阵fpga,由可编程的逻辑列阵fpga采集对应距离门的原始风速数据,以固定频率,采集发送给上位机。
21.包括以下具体步骤:s01、采集对应距离门的原始风速数据。
22.s02、照距离门采集的原始数据反演成风速。
23.实施例二:结合图1和图2,选择自适应调节模式时:以自适应调节模式设置距离门值并由可编程的逻辑列阵fpga采集对应位置的风速数据;该自适应调节模式是指系统下发由自适应算法中计算返回的距离门值,并采集风速数据。
24.自适应调节的原则:利用距离差和风速相似性表征风速的变化剧烈程度和距离的关系,在风速变化剧烈的地方缩小距离门。
25.包括以下具体步骤:s01、采集初始距离门对应位置的风速数据作为原始数据,即通过激光雷达的望远镜采集初始距离门处的光电信号,利用回光的光电信号与出光信号进行拍频。
26.s02、按照s01采集的原始数据反演成风速,即可编程的逻辑列阵fpga利用傅里叶变换算法将s01中的光电信号进行频域变换。
27.具体步骤如下:s02.1、对拍频后的数据进行傅里叶变化,即将时域信号转化成频域信号,其计算方法如下所示:,其中,为频率信号,为时域信号,为频
率,t为时间,为复数基。
28.s02.2、利用周期图法对获得频域信号进行累加,其公式如下所示:,其中, n为累加次数,为频率信号,为频域信号的频率,为功率谱,为功率谱的频率,累加后的频域信号呈现开口向下的抛物线,而峰值处的频率值为多普勒频移。
29.s02.3、利用一阶差分法寻找峰值点i的频率,一阶差分公式为:。
30.s02.4、根据,其中峰值点i对应的频率为多普勒频移fd。
31.s02.5、利用计算出风速v,其中λ为波长;从而将频率信号数转为各个对应距离门的风速数据。
32.s03、将s02反演风速作为自适应算法输入源,通过自适应算法建立距离差和风速相似性的关系模型。
33.具体步骤如下:s03.1、累积每个距离门s分钟内的风速数据,其中任意一个距离门表示为:,其中第j个风速表示为,n个距离门的风速集合为,其中第i个距离门表示为,表示第i个距离门中第j时刻的风速。
34.s03.2、计算相邻两个距离门之间的风速数据相关性pi:,其中为第i距离门的平均风速。
35.s03.3、计算相邻距离门之间的间隔,距离门集合表示:,集合中的任意一距离门用表示,则相邻距离门之间的间隔差为。
36.s03.4、通过风速数据相关性pi和相邻距离门之间的间隔差计算得出相关性距离函数ri,,形成相邻距离门之间的相关性距离函数集合。
37.s03.5、计算相关性距离函数的均值。
38.s04、通过关系模型对初始距离门进行修正,得到新的距离门,即新的距离门代替初始距离门。
39.具体步骤如下:s04.1、修正距离门的阈值,。
40.s04.2、判断相关性距离函数ri是否大于距离门的阈值。
41.s04.3、若ri>,则更新距离门。
42.所述更新距离门为在ri>时,在第i和第i+1的距离门之间增加距离门,增加的距离门取相邻距离门值的均值,,表示第i个距离门值,表示第i+1个距离门值,当增加距离门后,增加的距离门代替表示的距离门,形成新的距离门。
43.s04.4、若ri≤,则保持现有的距离门不改变。
44.s05、重复s01-s04。
45.实施例三:在图3中,最上面的实线表示实际风速,中间的条状图在横坐标上标记
△
,
△
表示距离门,通过距离门处测量值的连线构成测量的风速曲线。通过比对,该风速曲线与实际风速曲线存在较大偏差。
46.下面采用本方法通过对距离门的实现风速测量的修正:对于10个距离门的雷达,各距离门采集的数据平均累计5分钟,得到10个距离门的风速数据:,其中某一个距离门的风速可表示:,对于每个距离门集合表示:,则集合中的任意距离门可用表示,则相邻距离门之间的距离差为。
47.结合风速的相关性和距离门之间的间隔可以求出相关性距离函数,相关性距离函数可表示为,计算相邻距离门之间的相关性函数集合为。计算相关性距离函数的均值,修正距离门的阈值为。
48.最后根据判断是否更新距离门,当存在ri>,在第i和第i+1的距离门之间增加距离门,增加的距离门取相邻距离门值的均值,,表示第i个距离门值,表示第i+1个距离门值,当增加距离门后,增加的距离门代替表示的距离门,形成新的距离门;当不存在ri>,则保持现有的距离门不改变。
49.所以本发明能够在相同测风距离门个数的时候,将风速变化剧烈的距离处设置更多的测风距离门,从而使得在整个测风过程中获得的风速数据更加正确的表征风场实际的风速。
50.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,上述实施例不以任何形式限制本发明,凡采用等同替换或等效变换的方式所获得的技术方案,均落在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1