基于激光振镜的条纹投影方法、装置、电子设备及介质与流程
本技术涉及光学投影,尤其涉及一种基于激光振镜的条纹投影方法、装置、电子设备及介质。
背景技术:
1、随着人工智能的发展,3d结构光三维重建技术已经被大多数厂家产品化,主要用于工业机器视觉领域,引导机械手在流水线上,替代人工,进行工件的上下料。
2、目前产生结构光的方式通常是由dlp(d i gita l li ght process i ng,数字光处理)投影仪产生,但是dlp投影仪光源均是led(li ght emitt i ng di ode,发光二极管),由于dlp芯片支持的功率不高,因此led的亮度不能太高,使得随着距离的增大,亮度会迅速减弱,从而投射出来的条纹图案对比度较低,且由于dlp芯片内部反射镜的结构存在互反射的干扰,导致投射出的条纹图案清晰度较低。
技术实现思路
1、本技术的主要目的在于提供一种基于激光振镜的条纹投影方法、装置、电子设备及介质,旨在解决现有技术中投射出的条纹图案清晰度较低的技术问题。
2、为实现上述目的,本技术提供一种基于激光振镜的条纹投影方法,应用于条纹投影系统,所述条纹投影系统包括激光器、振镜和相机,所述基于激光振镜的条纹投影方法包括:
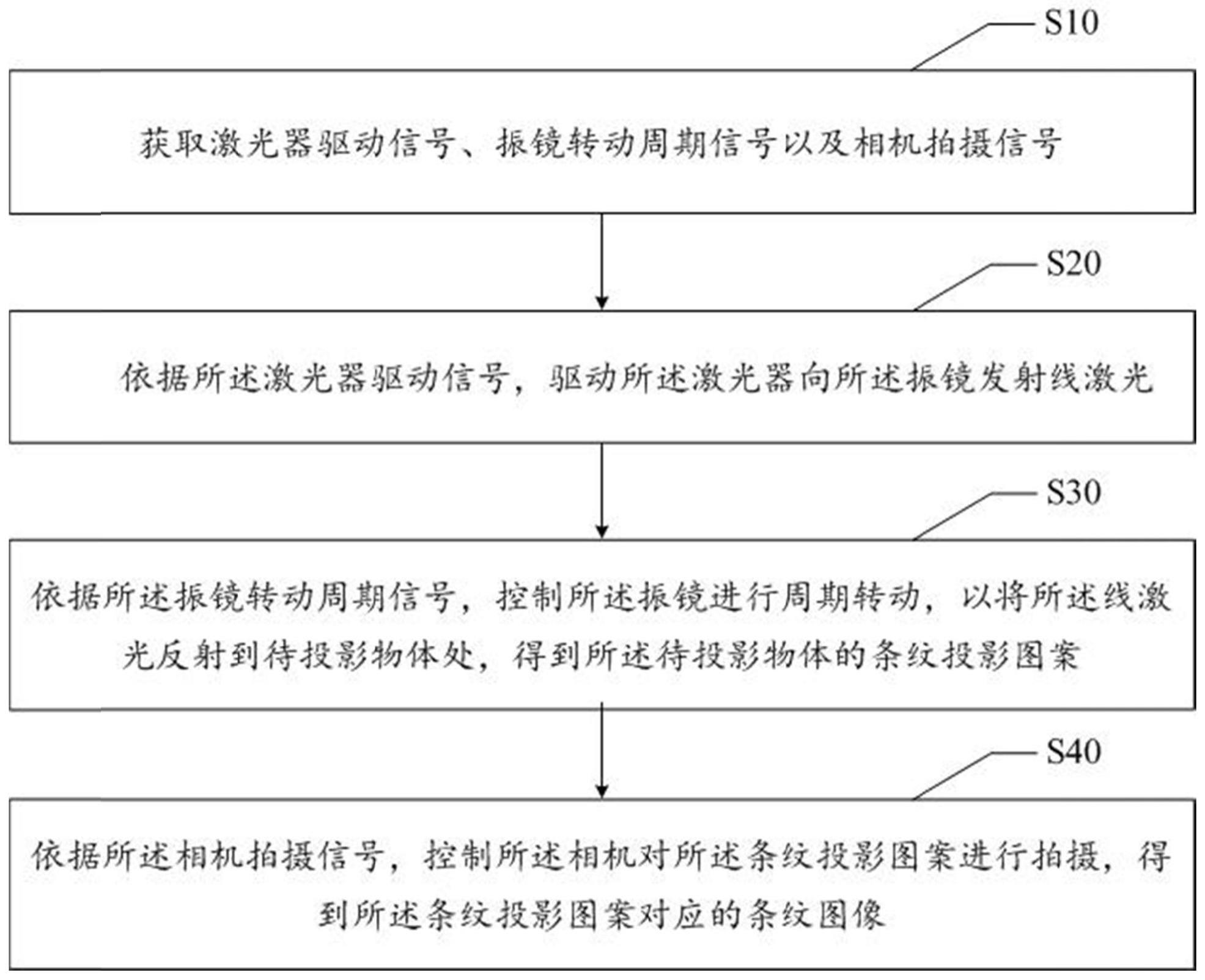
3、获取激光器驱动信号、振镜转动周期信号以及相机拍摄信号;
4、依据所述激光器驱动信号,驱动所述激光器向所述振镜发射线激光;
5、依据所述振镜转动周期信号,控制所述振镜进行周期转动,以将所述线激光反射到待投影物体处,得到所述待投影物体的条纹投影图案;
6、依据所述相机拍摄信号,控制所述相机对所述条纹投影图案进行拍摄,得到所述条纹投影图案对应的条纹图像。
7、可选地,所述获取激光器驱动信号、振镜转动周期信号以及相机拍摄信号的步骤包括:
8、获取所述激光器对应的正弦波数据、所述振镜对应的三角波数据以及所述相机对应的脉冲数据;
9、通过预设数模转换模块,将所述正弦波数据转化为所述激光器驱动信号;
10、依据预设振镜控制协议,将所述三角波数据转化为所述振镜转动周期信号;
11、通过调用预设输入输出接口,将所述脉冲数据转化为所述相机拍摄信号。
12、可选地,所述依据所述振镜转动周期信号,控制所述振镜进行周期转动,以将所述线激光反射到待投影物体处,得到所述待投影物体的条纹投影图案的步骤包括:
13、依据所述振镜转动周期信号,确定所述振镜的周期转动频率;
14、根据所述周期转动频率,控制所述振镜转动,以使所述振镜从不同角度将所述线激光反射到待投影物体处,得到所述条纹投影图案。
15、可选地,所述振镜包括聚焦组件,所述以使所述振镜从不同角度将所述线激光反射到待投影物体处,得到所述待投影物体的条纹投影图案的步骤包括:
16、通过所述聚焦组件对所述线激光进行聚合,输出面条纹光;
17、将所述面条纹光反射到所述待投影物体上,得到所述条纹投影图案。
18、可选地,所述依据所述激光器驱动信号,驱动所述激光器向所述振镜发射线激光的步骤包括:
19、解析所述激光器驱动信号,得到所述线激光的目标线距离、目标线宽和目标线长;
20、依据所述目标线距离、所述目标线宽和所述目标线长,控制所述激光器发射出不同亮度的线激光。
21、可选地,在所述依据所述相机拍摄信号,控制所述相机对所述条纹投影图案进行拍摄,得到所述条纹投影图案对应的条纹图像的步骤之前,还包括:
22、依据所述振镜的转动标志信息,检测所述振镜的转动周期是否达到预设转动周期;
23、若是,则触发所述相机拍摄信号,控制所述相机对所述条纹投影图案进行拍摄,得到所述条纹图像;
24、若否,则控制所述振镜继续转动,直至所述转动周期达到所述预设转动周期。
25、可选地,在所述依据所述相机拍摄信号,控制所述相机对所述条纹投影图案进行拍摄,得到所述条纹投影图案对应的条纹图像的步骤之后,还包括:
26、通过对所述条纹图像进行图像处理,得到所述待投影物体的三维点云图像;
27、依据所述三维点云图像,确定所述待投影物体的三维信息,以进行所述待投影物体的三维重建。
28、本技术还提供一种基于激光振镜的条纹投影装置,应用于条纹投影系统,所述条纹投影系统包括激光器、振镜和相机,所述基于激光振镜的条纹投影装置包括:
29、获取信号模块,用于获取激光器驱动信号、振镜转动周期信号以及相机拍摄信号;
30、发射线激光模块,用于依据所述激光器驱动信号,驱动所述激光器向所述振镜发射线激光;
31、振镜投影模块,用于依据所述振镜转动周期信号,控制所述振镜进行周期转动,以将所述线激光反射到待投影物体处,得到所述待投影物体的条纹投影图案;
32、拍摄模块,用于依据所述相机拍摄信号,控制所述相机对所述条纹投影图案进行拍摄,得到所述条纹投影图案对应的条纹图像。
33、可选地,所述获取信号模块还用于:
34、获取所述激光器对应的正弦波数据、所述振镜对应的三角波数据以及所述相机对应的脉冲数据;
35、通过预设数模转换模块,将所述正弦波数据转化为所述激光器驱动信号;
36、依据预设振镜控制协议,将所述三角波数据转化为所述振镜转动周期信号;
37、通过调用预设输入输出接口,将所述脉冲数据转化为所述相机拍摄信号。可选地,所述振镜投影模块还用于:
38、依据所述振镜转动周期信号,确定所述振镜的周期转动频率;
39、根据所述周期转动频率,控制所述振镜转动,以使所述振镜从不同角度将所述线激光反射到待投影物体处,得到所述条纹投影图案。
40、可选地,所述振镜投影模块还用于:
41、通过所述聚焦组件对所述线激光进行聚合,输出面条纹光;
42、将所述面条纹光反射到所述待投影物体上,得到所述条纹投影图案。
43、可选地,所述发射线激光模块还用于:
44、解析所述激光器驱动信号,得到所述线激光的目标线距离、目标线宽和目标线长;
45、依据所述目标线距离、所述目标线宽和所述目标线长,控制所述激光器发射出不同亮度的线激光。
46、可选地,所述基于激光振镜的条纹投影装置还用于:
47、依据所述振镜的转动标志信息,检测所述振镜的转动周期是否达到预设转动周期;
48、若是,则触发所述相机拍摄信号,控制所述相机对所述条纹投影图案进行拍摄,得到所述条纹图像;
49、若否,则控制所述振镜继续转动,直至所述转动周期达到所述预设转动周期。
50、可选地,所述基于激光振镜的条纹投影装置还用于:
51、通过对所述条纹图像进行图像处理,得到所述待投影物体的三维点云图像;
52、依据所述三维点云图像,确定所述待投影物体的三维信息,以进行所述待投影物体的三维重建。
53、本技术还提供一种电子设备,所述电子设备为实体设备,所述电子设备包括:存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的所述基于激光振镜的条纹投影方法的程序,所述基于激光振镜的条纹投影方法的程序被处理器执行时可实现如上述的基于激光振镜的条纹投影方法的步骤。
54、本技术还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有实现基于激光振镜的条纹投影方法的程序,所述基于激光振镜的条纹投影方法的程序被处理器执行时实现如上述的基于激光振镜的条纹投影方法的步骤。
55、本技术还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述的基于激光振镜的条纹投影方法的步骤。
56、本技术提供了一种基于激光振镜的条纹投影方法、装置、电子设备及介质,与现有技术中通过采用dlp投影仪产生结构光从而进行条纹投影的方式相比,本技术首先获取激光器驱动信号、振镜转动周期信号以及相机拍摄信号;依据所述激光器驱动信号,驱动所述激光器向所述振镜发射线激光;依据所述振镜转动周期信号,控制所述振镜进行周期转动,以将所述线激光反射到待投影物体处,得到所述待投影物体的条纹投影图案;依据所述相机拍摄信号,控制所述相机对所述条纹投影图案进行拍摄,得到所述条纹投影图案对应的条纹图像。克服了因dlp芯片可支持功率不高以及内部反射镜结构的互反射干扰,使得投射出的条纹图案对比度较低,从而导致了条纹图案清晰度不高的技术缺陷,所以,提高了条纹投影图案的清晰度。
- 还没有人留言评论。精彩留言会获得点赞!