自动驾驶车辆的定位方法、控制装置、存储介质及车辆与流程
1.本发明涉及自动驾驶技术领域,具体提供一种自动驾驶车辆的定位方法、控制装置、存储介质及车辆。
背景技术:
2.在自动驾驶领域中,地图匹配和蒙特卡洛定位(monte-carlo localization,mcl)都需要一个初始定位,但在稀疏环境、gps信号异常的情况下,获取初始定位需要花费很长时间。基于位置识别(place recognition)的方法可以将地图划分至更精确的范围,并为数据库和后续搜索提取全局特征,该方法的精度可以达到10-15m,但位姿仍不够精确。基于回归的方法结合传统的mcl等方法,使用单次扫描作为输入,可以快速获取准确的定位。然而,这些方法的主要局限性是定位器必须在测试环境中训练,因此可扩展性和可推广性较差。
3.现有技术中采用深度学习匹配神经网络(deep learned matching neural network)的方法,显示出高鲁棒性和对新场景的强通用性,一些无关键点的方法甚至在结构退化或低重叠(low-overlapped scenarios)的情况下也能工作。
4.但上述方法不能应用于全局定位。首先,这些方法只能匹配两个大小相近的点云,因为对于共享的主干网络来说,数值的分布应该是相同的。此外,用于定位的点云地图对于匹配神经网络而言太大,对内存的消耗过大。虽然强制下采样可以解决此问题,但同时也会导致其他问题的出现,比如需要推理太多环境细节等。
5.相应地,本领域需要一种新的自动驾驶的定位方案来解决上述问题。
技术实现要素:
6.为了克服上述缺陷,提出了本发明,以提供解决或至少部分地解决在缺少初始定位时,如何准确高效地获取全局定位结果的问题。
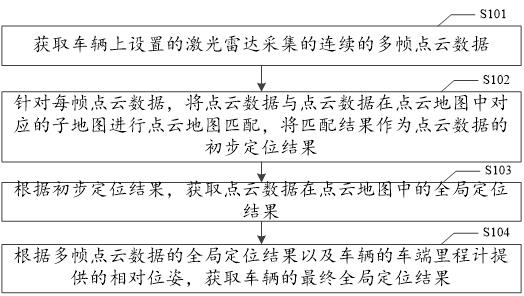
7.在第一方面,本发明提供一种自动驾驶车辆的定位方法,所述方法包括:获取所述车辆上设置的激光雷达采集的连续的多帧点云数据;针对每帧点云数据,将所述点云数据与所述点云数据在点云地图中对应的子地图进行点云地图匹配,将匹配结果作为所述点云数据的初步定位结果;根据所述初步定位结果,获取所述点云数据在所述点云地图中的全局定位结果;根据所述多帧点云数据的全局定位结果以及所述车辆的车端里程计提供的相对位姿,获取所述车辆的最终的全局定位结果。
8.在上述自动驾驶车辆的定位方法的一个技术方案中,所述针对每帧点云数据,将所述点云数据与所述点云数据在点云地图中对应的子地图进行点云地图匹配,将匹配结果作为所述点云数据的初步定位结果,包括:针对多帧点云数据中的第一帧点云数据,将所述第一帧点云数据与所述点云地图中包含的所有子地图进行点云地图匹配,将匹配结果作为所述第一帧点云数据的初步定位结果,并根据所述初步定位结果获取所述第一帧点云数据的地图搜索范围;
针对多帧点云数据中的其他帧点云数据,判断所述当前帧点云数据的前一帧点云数据的初步定位结果中的匹配置信度是否大于预设的第一置信度阈值;若是,则将前一帧点云数据的初步定位结果作为当前帧点云数据的初步定位结果,并根据初步定位结果获取当前帧点云数据的地图搜索范围;若否,则将当前帧点云数据与所述点云地图中包含的所有子地图进行点云地图匹配,将匹配结果作为当前点云数据的初步定位结果,并根据所述初步定位结果获取当前点云数据的地图搜索范围。
9.在上述自动驾驶车辆的定位方法的一个技术方案中,所述根据所述初步定位结果,获取所述点云数据在所述点云地图中的全局定位结果,包括:根据所述初步定位结果和所述地图搜索范围,在所述地图搜索范围内对所述点云数据进行点云地图匹配;将所述点云数据的匹配结果作为所述全局定位结果。
10.在上述自动驾驶车辆的定位方法的一个技术方案中,所述在所述地图搜索范围内对所述点云数据进行点云地图匹配,包括:根据所述地图搜索范围和所述点云数据的面积,确定在所述地图搜索范围中获取子地图的方式;应用所述方式,获取所述地图搜索范围中的子地图,并将所述点云数据与其对应的子地图进行点云地图匹配。
11.在上述自动驾驶车辆的定位方法的一个技术方案中,所述根据所述地图搜索范围和所述点云数据的面积,确定在所述地图搜索范围中获取子地图的方式,包括:当所述搜索范围和所述点云数据的面积比值大于预设的比例阈值时,先采用网格搜索方式在所述搜索范围内获取所述子地图;当获取到网格搜索方式的匹配结果后,再采用滑动搜索方式在所述匹配结果确定的地图搜索范围内获取所述子地图;当所述面积比值小于等于所述比例阈值时,采用滑动搜索方式在所述地图搜索范围内获取所述子地图。
12.在上述自动驾驶车辆的定位方法的一个技术方案中,所述应用所述方式,获取所述地图搜索范围中的子地图,并将所述点云数据与其对应的子地图进行点云地图匹配,包括:当应用所述网格搜索方式,将所述点云数据分别与其对应的子地图进行点云地图匹配时,获取匹配结果中的匹配置信度;将所述匹配置信度为top n的子地图组成的区域作为所述滑动搜索方式的地图搜索范围,其中,n为大于一的正整数;当应用所述滑动搜索方式,将所述点云数据分别与其对应的子地图进行点云地图匹配时,获取匹配结果中的匹配置信度;将所述匹配置信度与预设的第二置信度阈值进行比较;当所述匹配置信度大于所述第二置信度阈值时,将所述匹配置信度对应的匹配结果作为当前的匹配结果,并结束所述滑动搜索方式。
13.在上述自动驾驶车辆的定位方法的一个技术方案中,所述应用所述方式,获取所述地图搜索范围中的子地图,并将所述点云数据与其对应的子地图进行点云地图匹配,还
包括:当执行滑动搜索方式的次数大于预设的次数阈值时,停止所述滑动搜索方式;根据获取的最大的匹配置信度对应的匹配结果,获取所述全局定位结果。
14.在上述自动驾驶车辆的定位方法的一个技术方案中,所述点云地图匹配,包括:将点云数据和子地图输入至训练好的深度学习神经网络中,通过所述深度学习神经网络获取所述点云数据与所述子地图之间的匹配关系;根据所述匹配关系,获取所述匹配关系对应的匹配结果。
15.在上述自动驾驶车辆的定位方法的一个技术方案中,所述通过所述深度学习神经网络获取所述点云数据与所述子地图之间的匹配关系,包括:通过所述深度学习神经网络的核点卷积层分别获得所述点云数据和所述子地图的粗级别点云和精细点云;将所述点云数据和所述子地图的粗级别点云进行粗匹配,获取粗匹配结果;根据所述粗匹配结果,对所述点云数据和所述子地图的精细点云进行精细匹配,获取精细匹配结果,将所述精细匹配结果作为所述匹配关系。
16.在上述自动驾驶车辆的定位方法的一个技术方案中,所述核点卷积层包含依次设置的五层编码器,以及设置在五层编码器之后的依次设置的三层解码器;所述通过所述深度学习神经网络的核点卷积层分别获得所述点云数据和所述子地图的粗级别点云和精细点云,包括:根据最后一层编码器的输出获取所述粗级别点云;根据最后一层解码器的输出获取所述精细点云。
17.在上述自动驾驶车辆的定位方法的一个技术方案中,所述将所述点云数据和所述子地图的粗级别点云进行粗匹配,获取粗匹配结果,包括:将所述点云数据和所述子地图的粗级别点云进行特征交互;根据特征交互后的粗级别点云,获取所述粗级别点云之间的基于距离的特征矩阵;根据所述特征矩阵,获取所述点云数据和所述子地图的粗匹配结果。
18.在上述自动驾驶车辆的定位方法的一个技术方案中,所述根据所述特征矩阵,获取所述点云数据和所述子地图的粗匹配结果,包括:应用softmax函数对所述特征矩阵进行处理,将处理后的特征矩阵的元素与预设的距离阈值进行比较;当所述元素小于所述距离阈值时,将所述元素对应的粗级别点云作为所述粗匹配结果。
19.在上述自动驾驶车辆的定位方法的一个技术方案中,所述根据所述粗匹配结果,对所述点云数据和所述子地图的精细点云进行精细匹配,获取精细匹配结果,包括:根据所述粗匹配结果中所述点云数据与所述子地图的粗级别点云与精细点云之间的空间距离,构建精细点云块;根据所述粗匹配结果中对应的精细点云块,获取所述精细匹配结果。
20.在上述自动驾驶车辆的定位方法的一个技术方案中,所述根据所述匹配关系,获取所述匹配关系对应的匹配结果,包括:
获取所述匹配关系对应的点云数据与子地图之间的位姿关系;根据所述位姿关系,获取所述位姿关系的匹配置信度;将所述位姿关系和对应的匹配置信度作为所述匹配关系的匹配结果。
21.在上述自动驾驶车辆的定位方法的一个技术方案中,所述方法还包括根据以下步骤训练所述深度学习神经网络:将预处理的点云数据与子地图组成的匹配对、子地图和子地图组成的匹配对以及对所述匹配对进行随机变换后的数据作为数据集;应用所述数据集对所述深度学习神经网络进行训练,以获取训练好的深度学习神经网络。
22.在上述自动驾驶车辆的定位方法的一个技术方案中,所述根据所述多帧点云数据的全局定位结果以及所述车辆的车端里程计提供的相对位姿,获取所述车辆的最终的全局定位结果,包括:根据所述多帧点云数据的全局定位结果和所述车辆的车端里程计提供的相对位姿,构建因子图;根据所述因子图,对所述全局定位结果进行优化,获取所述最终的全局定位结果。
23.在第二方面,提供一种控制装置,该控制装置包括处理器和存储装置,所述存储装置适于存储多条程序代码,所述程序代码适于由所述处理器加载并运行以执行上述自动驾驶车辆的定位方法的技术方案中任一项技术方案所述的自动驾驶车辆的定位方法。
24.在第三方面,提供一种计算机可读存储介质,该计算机可读存储介质其中存储有多条程序代码,所述程序代码适于由处理器加载并运行以执行上述自动驾驶车辆的定位方法的技术方案中任一项技术方案所述的自动驾驶车辆的定位方法。
25.在第四方面,提供一种车辆,所述车辆包括上述控制装置技术方案中的控制装置。
26.本发明上述一个或多个技术方案,至少具有如下一种或多种有益效果:在实施本发明的技术方案中,本发明将激光雷达采集的连续的多帧点云数据分别与每帧点云数据在点云地图中对应的子地图进行点云地图匹配,以获得初步定位结果,再根据初步定位结果,获取每帧点云数据的全局定位结果,并进一步根据多帧点云数据的全局定位结果和车端里程计提供的相对位姿,获取车辆的最终的全局定位结果。通过上述配置方式,本发明能够在缺少初始定位的情况下,也能够获取到全局定位结果,且能够基于车端里程计提供的相对位姿,对获取的全局定位结果进行优化,能够改善非结构化场景中存在的定位误差大的问题,具备鲁棒性高、可扩展性和可推广性好的特点。
附图说明
27.参照附图,本发明的公开内容将变得更易理解。本领域技术人员容易理解的是:这些附图仅仅用于说明的目的,而并非意在对本发明的保护范围组成限制。其中:图1是根据本发明的一个实施例的自动驾驶车辆的定位方法的主要步骤流程示意图;图2是根据本发明实施例的一个实施方式的点云地图匹配的主要步骤流程示意图;图3是根据本发明实施例的一个实施方式的网格搜索方式和滑动搜索方式的对比
示意图。
具体实施方式
28.下面参照附图来描述本发明的一些实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非旨在限制本发明的保护范围。
29.在本发明的描述中,“模块”、“处理器”可以包括硬件、软件或者两者的组合。一个模块可以包括硬件电路,各种合适的感应器,通信端口,存储器,也可以包括软件部分,比如程序代码,也可以是软件和硬件的组合。处理器可以是中央处理器、微处理器、图像处理器、数字信号处理器或者其他任何合适的处理器。处理器具有数据和/或信号处理功能。处理器可以以软件方式实现、硬件方式实现或者二者结合方式实现。非暂时性的计算机可读存储介质包括任何合适的可存储程序代码的介质,比如磁碟、硬盘、光碟、闪存、只读存储器、随机存取存储器等等。术语“a和/或b”表示所有可能的a与b的组合,比如只是a、只是b或者a和b。术语“至少一个a或b”或者“a和b中的至少一个”含义与“a和/或b”类似,可以包括只是a、只是b或者a和b。单数形式的术语“一个”、“这个”也可以包含复数形式。
30.参阅附图1,图1是根据本发明的一个实施例的自动驾驶车辆的定位方法的主要步骤流程示意图。如图1所示,本发明实施例中的自动驾驶车辆的定位方法主要包括下列步骤s101-步骤s104。
31.步骤s101:获取车辆上设置的激光雷达采集的连续的多帧点云数据。
32.在本实施例中,可以获取车辆上设置的激光雷达采集的连续多帧点云数据。
33.步骤s102:针对每帧点云数据,将点云数据与点云数据在点云地图中对应的子地图进行点云地图匹配,将匹配结果作为点云数据的初步定位结果。
34.在本实施例中,可以将每帧点云数据与其对应的子地图进行点云地图匹配。即,将点云地图划分为多个子地图,点云数据与其中的部分或全部子地图进行匹配,从而获得初步定位结果。
35.一个实施方式中,可以应用基于概率分布的点云配准算法、基于局部特征描述子的点云配准算法和icp(iterative closest point,迭代最近点)算法等进行点云数据与子地图之间的匹配。
36.步骤s103:根据初步定位结果,获取点云数据在点云地图中的全局定位结果。
37.在本实施例中,可以根据步骤s102获取的初步定位结果,获取点云数据在点云地图中的全局定位结果。
38.一个实施方式中,可以在获取初步定位结果后,在初步定位结果的预设范围内,再应用点云配准算法将点云数据与预设范围内的点云地图进行匹配,以获取全局定位结果。如根据ndt(normal distribution transform,正态分布转换)点云配准算法获取初步定位结果,再应用icp点云配准算法获取全局定位结果。
39.步骤s104:根据多帧点云数据的全局定位结果以及车辆的车端里程计提供的相对位姿,获取车辆的最终的全局定位结果。
40.在本实施例中,可以根据多帧点云数据的全局定位结果以及车端里程计提供的相对位姿,来确定最终的全局定位结果。结合车端里程计获取最终的全局定位结果,能够对步骤s103获取的全局定位结果进行优化,以确定在非结构化场景下的全局定位的鲁棒性。
41.一个实施方式中,可以基于车端里程计提供的相对位姿,对步骤s103获取的全局定位结果进行修正,以获取最终的全局定位结果。
42.基于上述步骤s101-步骤s104,本发明实施例将激光雷达采集的连续的多帧点云数据分别与每帧点云数据在点云地图中对应的子地图进行点云地图匹配,以获得初步定位结果,再根据初步定位结果,获取每帧点云数据的全局定位结果,并进一步根据多帧点云数据的全局定位结果和车端里程计提供的相对位姿,获取车辆的最终的全局定位结果。通过上述配置方式,本发明实施例能够在缺少初始定位的情况下,也能够获取到全局定位结果,且能够基于车端里程计提供的相对位姿,对获取的全局定位结果进行优化,能够改善非结构化场景中存在的定位误差大的问题,具备鲁棒性高、可扩展性和可推广性好的特点。
43.下面对步骤s102至步骤s104作进一步地说明。
44.在本发明实施例的一个实施方式中,步骤s102可以进一步包括以下步骤s1021至步骤s1024:步骤s1021:针对多帧点云数据中的第一帧点云数据,将第一帧点云数据与点云地图中包含的所有子地图进行点云地图匹配,将匹配结果作为第一帧点云数据的初步定位结果,并根据初步定位结果获取第一帧点云数据的地图搜索范围。
45.步骤s1022:针对多帧点云数据中的其他帧点云数据,判断当前帧点云数据的前一帧点云数据的初步定位结果中的匹配置信度是否大于预设的第一置信度阈值;若是,跳转至步骤s1023;若否,跳转至步骤s1024。
46.步骤s1023:将前一帧点云数据的初步定位结果作为当前帧点云数据的初步定位结果,并根据初步定位结果获取当前帧点云数据的地图搜索范围。
47.步骤s1024:将当前帧点云数据与点云地图中包含的所有子地图进行点云地图匹配,将匹配结果作为当前点云数据的初步定位结果,并根据初步定位结果获取当前点云数据的地图搜索范围。
48.在本实施方式中,可以根据每帧点云数据的前一帧点云数据的初步定位结果中的匹配置信度来确定当前点云数据是根据前一帧点云数据的初步定位结果来获取地图搜索范围,还是需要与点云地图中包含的所有子地图进行点云地图匹配,从而获得地图搜索范围。其中,地图搜索范围是以初步定位结果为中心,取半径为某一超参的区域。
49.一个实施方式中,步骤s103可以进一步包括以下步骤s1031和步骤s1032:步骤s1031:根据初步定位结果和地图搜索范围,在地图搜索范围内对点云数据进行点云地图匹配。
50.在本实施方式中,步骤s1031可以进一步包括以下步骤s10311和步骤s10312:步骤s10311:根据地图搜索范围和点云数据的面积,确定在地图搜索范围中获取子地图的方式。
51.在本实施方式中,步骤s10311可以进一步包括步骤s103111至步骤s103112:步骤s103111:当搜索范围和点云数据的面积比值大于预设的比例阈值时,先采用网格搜索方式在搜索范围内获取子地图;当获取到网格搜索方式的匹配结果后,再采用滑动搜索方式在匹配结果确定的地图搜索范围内获取子地图。
52.步骤s103112:当面积比值小于等于比例阈值时,采用滑动搜索方式在地图搜索范围内获取子地图。
53.在本实施方式中,可以参阅附图3,图3是根据本发明实施例的一个实施方式的网格搜索方式和滑动搜索方式的对比示意图。其中,图3中左侧方框为网格搜索方式,即,将地图搜索范围通过网格的形式划分为多个网格,将点云数据与每个网格进行点云地图匹配,将匹配置信度较高的子地图用于下一轮搜索。图3中间的方框为滑动搜索方式,即,采用横纵坐标滑动的方式(step x;step y)来获取子地图,其中每次滑动的范围可以通过超参来控制,gt position可以为初步定位结果。如图3所示,如果搜索范围较大,即搜索范围与点云数据的面积比值大于比例阈值,则可以先使用网格搜索的方式获取子地图,在获取到网格搜索方式获得的匹配结果后,在该匹配结果的基础上使用滑动搜索的方式获取子地图。如果搜索范围较小,即搜索范围与点云数据的面积比值小于等于比例阈值,则可以直接采用滑动搜索的方式获取子地图。
54.步骤s10312:应用方式,获取地图搜索范围中的子地图,并将点云数据与其对应的子地图进行点云地图匹配。
55.在本实施方式中,步骤s10312可以进一步包括以下步骤s103121至步骤s103125:步骤s103121:当应用网格搜索方式,将点云数据分别与其对应的子地图进行点云地图匹配时,获取匹配结果中的匹配置信度。
56.步骤s103122:将匹配置信度为top n的点云数据组成的区域作为滑动搜索方式的地图搜索范围,其中,n为大于一的正整数。
57.步骤s103123:当应用滑动搜索方式,将点云数据分别与其对应的子地图进行点云地图匹配时,获取匹配结果中的匹配置信度。
58.步骤s103124:将匹配置信度与预设的第二置信度阈值进行比较。
59.步骤s103125:当匹配置信度大于第二置信度阈值时,将匹配置信度对应的匹配结果作为当前的匹配结果,并结束滑动搜索方式。
60.在本实施方式中,当应用网格搜索方式获取子地图时,可以将点云数据分别与其对应的子地图进行点云地图匹配,并选取匹配置信度为top n的子地图作为滑动搜索方式的地图搜索范围。当应用滑动搜索方式获取子地图时,可以将点云数据分别与其对应的子地图进行点云地图匹配,并将每次获得的匹配置信度与第二置信度阈值进行比较,当获取到的匹配置信度大于第二置信度阈值时,则认为匹配成功,则可以结束当前的点云地图匹配。
61.一个实施方式中,可以设置执行滑动搜索方式的次数阈值,当执行滑动搜索方式的次数超过次数阈值后,就可以停止滑动搜索,将获取的最大匹配置信度对应的匹配结果,作为全局定位结果。设置次数阈值的目的是为了避免高于置信度阈值的匹配置信度不存在,导致一直进行滑动搜索的情况。
62.步骤s1032:将点云数据的匹配结果作为全局定位结果。
63.在本实施方式中,可以将在地图搜索范围内与子地图进行点云地图匹配获得的匹配结果,作为点云数据的全局定位结果。
64.在本发明实施例的一个实施方式中,步骤s104可以进一步包括以下步骤s1041和步骤s1042:步骤s1041:根据多帧点云数据的全局定位结果和车辆的车端里程计提供的相对位姿,构建因子图。
65.步骤s1042:根据因子图,对全局定位结果进行优化,获取最终的全局定位结果。
66.在本实施方式中,为了防止在复杂场景下,点云数据与点云地图匹配无法保证全局定位的鲁棒性的问题,采用因子图将多帧点云数据获得的连续的全局定位结果和车端里程计提供的相对位姿进行融合,以优化全局定位结果,获取最终的全局定位结果。具体为,将连续多帧点云数据和连续的全局定位结果作为因子图的顶点,将车端里程计的相对位姿作为因子图的边。以全局定位结果及其匹配置信度为基础构建一元因子,以车端里程计的相对位姿为基础构建二元因子。优化的过程可以采用symforce框架。
67.下面参阅附图2对点云地图匹配的具体步骤作进一步地说明,图2是根据本发明实施例的一个实施方式的点云地图匹配的主要步骤流程示意图。
68.在本发明实施例的一个实施方式中,可以通过以下步骤s201和步骤s202进行点云地图匹配:步骤s201:将点云数据和子地图输入至训练好的深度学习神经网络中,通过深度学习神经网络获取点云数据与子地图之间的匹配关系。
69.在本实施方式中,步骤s201可以进一步包括以下步骤s2011至步骤s2013:步骤s2011:通过深度学习神经网络的核点卷积层分别获得点云数据和子地图的粗级别点云和精细点云。
70.在本实施方式中,如图2所示,核点卷积层包含依次设置的五层编码器,以及设置在五层编码器之后的依次设置的三层解码器,步骤s2011可以进一步包括以下步骤s20111至步骤s20112:步骤s20111:根据最后一层编码器的输出获取粗级别点云。
71.步骤s20112:根据最后一层解码器的输出获取精细点云。
72.在本实施方式中,如图2所示,可以将最后一层编码器的输出获取粗级别点云,可以将最后一层解码器的输出获取精细点云。其中,粗级别点云的空间分辨率最小,但是特征维度最高;精细点云的空间分辨率高,特征维度低。
73.步骤s2012:将点云数据和子地图的粗级别点云进行粗匹配,获取粗匹配结果。
74.在本实施方式中,步骤s2012可以进一步包括步骤s20121至步骤s20123:步骤s20121:将点云数据和子地图的粗级别点云进行特征交互。
75.在本实施方式中,如图2所示,可以将点云数据与子地图的粗级别点云进行特征交互,即通过图2中的rpe转换器中的自注意力层(self-attention layer)和交叉注意力层(cross-attention layer),进行粗级别点云的内部的特征交互和粗级别点云之间的特征交互。其中,自注意力层和交叉注意力层可以均以多头形式执行。
76.步骤s20122:根据特征交互后的粗级别点云,获取粗级别点云之间的基于距离的特征矩阵。
77.步骤s20123:根据特征矩阵,获取点云数据和子地图的粗匹配结果。
78.在本实施方式中,步骤s20123可以进一步包括步骤s201231至步骤s201232:步骤s201231:应用softmax函数对特征矩阵进行处理,将处理后的特征矩阵的元素与预设的距离阈值进行比较步骤s201232:当元素小于距离阈值时,将距离阈值对应的粗级别点云作为粗匹配结果。
79.在本实施方式中,可以应用softmax函数来对粗级别点云之间的基于距离的特征矩阵进行处理,可以通过softmax函数对特征矩阵进归一化处理,将归一化处理后的特征矩阵的元素分别与距离阈值进行比较,若元素小于距离阈值,则可以将该元素对应的粗级别点云作为粗匹配结果,从而获得多个粗级别点云的匹配对作为粗匹配结果。
80.步骤s2013:根据粗匹配结果,对点云数据和子地图的精细点云进行精细匹配,获取精细匹配结果,将精细匹配结果作为匹配关系。
81.在本实施方式中,步骤s2013可以进一步包括以下步骤s20131至步骤s20132:步骤s20131:根据粗匹配结果中点云数据与子地图的粗级别点云与精细点云之间的空间距离,构建精细点云块。
82.步骤s20132:根据粗匹配结果中对应的精细点云块,获取精细匹配结果。
83.在本实施方式中,如图2所示,可以根据粗级别点云匹配的匹配结果,计算各个粗级别点云与精细点云之间的空间距离,并构建精细点云块(匹配块),以实现精细点云匹配,以获得多个精细点云匹配对,作为精细匹配结果。
84.一个实施方式中,可以通过sinkhorn算法计算精细点云块内的对应关系,从而获得精细匹配结果。
85.步骤s202:根据匹配关系,获取匹配关系对应的匹配结果。
86.在本实施方式中,步骤s202可以进一步包括以下步骤s2021至步骤s2023:步骤s2021:获取匹配关系对应的点云数据与子地图之间的位姿关系。
87.步骤s2022:根据位姿关系,获取位姿关系的匹配置信度。
88.步骤s2023:将位姿关系和对应的匹配置信度作为匹配关系的匹配结果。
89.在本实施方式中,可以根据匹配关系获取对应的点云数据与子地图之间的位姿关系,并进一步获取匹配置信度,基于位姿关系和匹配置信度获取匹配结果。可以采用lgr(local-to-global registration)配准方法获取匹配关系对应的点云数据与子地图之间的位姿关系。lgr配准方法为利用每个匹配关系中各个点的匹配关系配合加权svd(singular value decomposition,奇异值分解)计算一个局部转换关系,再将所有的局部转换关系在整个匹配关系中进行投票,选择一个最好的作为位姿关系,进行若干次迭代以实现位姿关系的优化。采用lgr配准方法避免了ransac(random sample consensus,随机抽样一致)算法中上万次的随机采样过程,lgr配准方法与ransac算法的配准精度相当,但是具备更高的计算效率。
90.一个实施方式中,可以采用mcr(matching consistency residuals,匹配一致性残差)的倒数作为匹配置信度,匹配结果中的匹配置信度越高,mcr值越低;反之,匹配结果中匹配置信度越低,mcr值越高。可以继续参阅附图3,图3中右侧为应用mcr指示匹配置信度的热图,高mcr(high mcr)表示低匹配置信度(low confidence),对应的热图的颜色浅,低mcr(low mcr)表示高匹配置信度(high confidence),对应的热图的颜色深。
91.一个实施方式中,可以将预处理的点云数据与子地图组成的匹配对、子地图和子地图组成的匹配对作为数据集来对深度学习神经网络进行训练。为了增加训练过程的泛化性,可以对以上匹配对进行随机分割和随机变换,将随机分割和随机变换后的数据,增加至数据集中,对深度学习神经网络进行训练。如以taug对数据进行随机变换,taug为随机产生的0
°‑
360
°
的偏航角、0
°‑
45
°
的俯仰角以及0
°‑
45
°
的横滚角,以及0-10m的平移变换。可将
taug作为ground-truth(基准真相)。
92.需要指出的是,尽管上述实施例中将各个步骤按照特定的先后顺序进行了描述,但是本领域技术人员可以理解,为了实现本发明的效果,不同的步骤之间并非必须按照这样的顺序执行,其可以同时(并行)执行或以其他顺序执行,这些变化都在本发明的保护范围之内。
93.本领域技术人员能够理解的是,本发明实现上述一实施例的方法中的全部或部分流程,也可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一计算机可读存储介质中,该计算机程序在被处理器执行时,可实现上述各个方法实施例的步骤。其中,所述计算机程序包括计算机程序代码,所述计算机程序代码可以为源代码形式、对象代码形式、可执行文件或某些中间形式等。所述计算机可读存储介质可以包括:能够携带所述计算机程序代码的任何实体或装置、介质、u盘、移动硬盘、磁碟、光盘、计算机存储器、只读存储器、随机存取存储器、电载波信号、电信信号以及软件分发介质等。需要说明的是,所述计算机可读存储介质包含的内容可以根据司法管辖区内立法和专利实践的要求进行适当的增减,例如在某些司法管辖区,根据立法和专利实践,计算机可读存储介质不包括电载波信号和电信信号。
94.进一步,本发明还提供了一种控制装置。在根据本发明的一个控制装置实施例中,控制装置包括处理器和存储装置,存储装置可以被配置成存储执行上述方法实施例的自动驾驶车辆的定位方法的程序,处理器可以被配置成用于执行存储装置中的程序,该程序包括但不限于执行上述方法实施例的自动驾驶车辆的定位方法的程序。为了便于说明,仅示出了与本发明实施例相关的部分,具体技术细节未揭示的,请参照本发明实施例方法部分。该控制装置可以是包括各种电子设备形成的控制装置设备。
95.进一步,本发明还提供了一种计算机可读存储介质。在根据本发明的一个计算机可读存储介质实施例中,计算机可读存储介质可以被配置成存储执行上述方法实施例的自动驾驶车辆的定位方法的程序,该程序可以由处理器加载并运行以实现上述自动驾驶车辆的定位方法。为了便于说明,仅示出了与本发明实施例相关的部分,具体技术细节未揭示的,请参照本发明实施例方法部分。该计算机可读存储介质可以是包括各种电子设备形成的存储装置设备,可选的,本发明实施例中计算机可读存储介质是非暂时性的计算机可读存储介质。
96.进一步,本发明还提供了一种车辆。在根据本发明的一个车辆实施例中,车辆可以包括控制装置实施例中的控制装置。
97.进一步,应该理解的是,由于各个模块的设定仅仅是为了说明本发明的装置的功能单元,这些模块对应的物理器件可以是处理器本身,或者处理器中软件的一部分,硬件的一部分,或者软件和硬件结合的一部分。因此,图中的各个模块的数量仅仅是示意性的。
98.本领域技术人员能够理解的是,可以对装置中的各个模块进行适应性地拆分或合并。对具体模块的这种拆分或合并并不会导致技术方案偏离本发明的原理,因此,拆分或合并之后的技术方案都将落入本发明的保护范围内。
99.至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征作出等同的更改或替换,这些
更改或替换之后的技术方案都将落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1