入射声场和散射声场分离方法、系统、装置及其存储介质与流程
:本发明涉及信号处理领域,尤其是指一种入射声场和散射声场分离方法、系统、装置及其存储介质。
背景技术
0、
背景技术:
1、当水中声波传播至结构表面会发生散射现象,表面接收到的为包含入射与散射的总声场信号。将入射与散射成分分离,一方面有利于更清晰地分析来波的信息,另一方面为结构散射声场的控制提供基础,具有工程意义。声场分离技术目前已发展出多种算法,包括空间傅里叶变换法、统计最优分离方法、边界元法以及等效源法等。信息输入方式包括双面声压信息、双面振速信息、单面声压与振速信息等。
2、但是,上述声场分离技术均用于声学测量的场景,若实际应用中希望通过结构表面的传感器实时得到完整的散射声场,将遇到以下问题:传感器距离结构表面过近,而结构表面处波的成分复杂且变化剧烈,导致分离误差较大,达不到分离的精度要求。
3、所以急需一种入射声场和散射声场分离方法,有助于解决现有技术中缺乏一种分离散射声场和入射声场的技术问题。
技术实现思路
0、
技术实现要素:
1、在一实施例中,本发明提供了一种入射声场和散射声场分离方法,通过建立声压全息面测得总声压场,利用不同入射角度和入射频率对应不同所述散射特性矩阵的对应关系式,进而利用波数域解卷积和空间傅里叶反变换分离得到散射声场和入射声场,有助于解决现有技术中缺乏一种分离散射声场和入射声场的技术问题。
2、所述入射声场和散射声场分离方法:
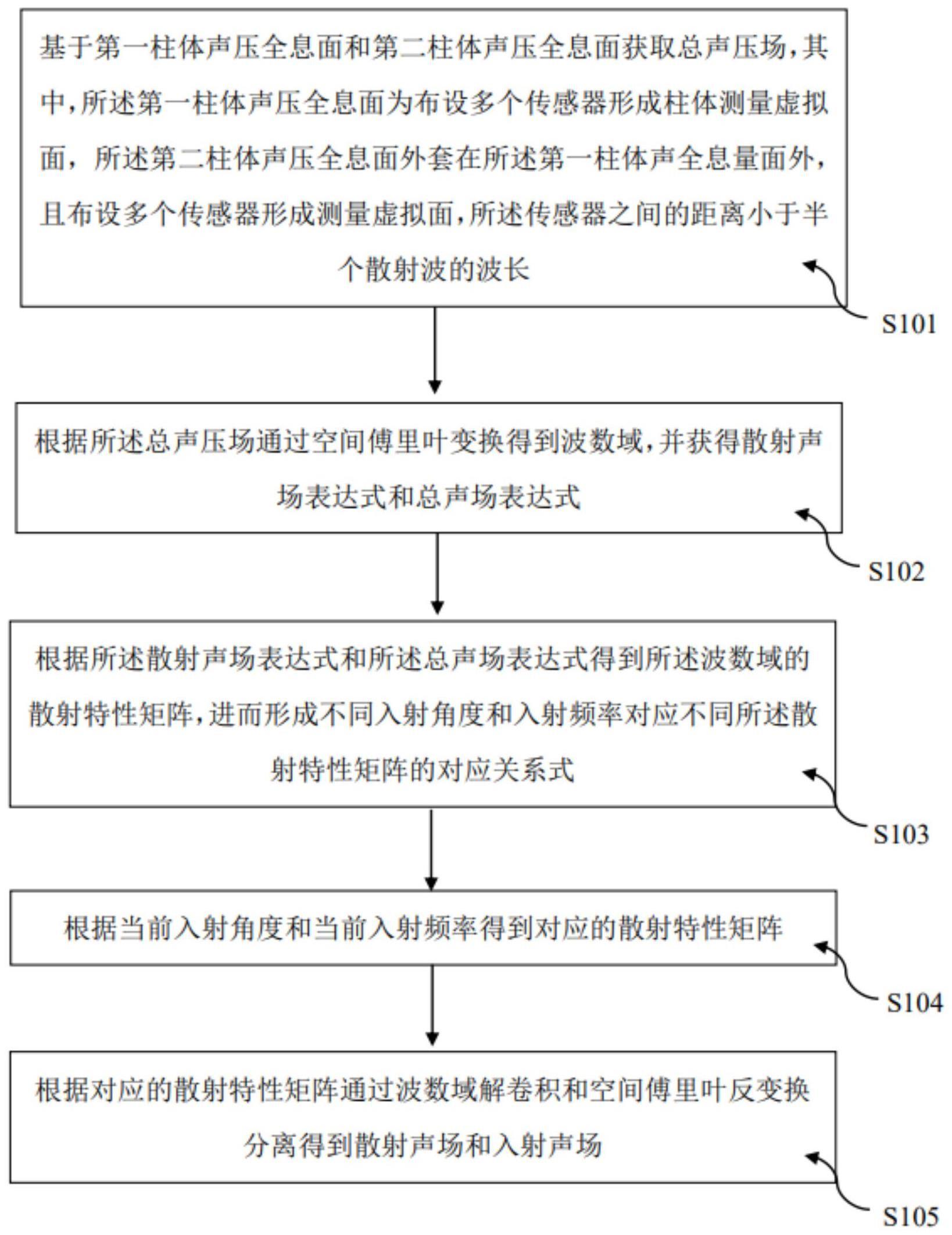
3、基于第一柱体声压全息面和第二柱体声压全息面获取总声压场,其中,所述第一柱体声压全息面为布设多个传感器形成柱体测量虚拟面,所述第二柱体声压全息面外套在所述第一柱体声全息量面外,且布设多个传感器形成测量虚拟面,所述传感器之间的距离小于半个散射波的波长;
4、根据所述总声压场通过空间傅里叶变换得到波数域,并获得散射声场表达式和总声场表达式;
5、根据所述散射声场表达式和所述总声场表达式得到所述波数域的散射特性矩阵,进而形成不同入射角度和入射频率对应不同所述散射特性矩阵的对应关系式;
6、根据当前入射角度和当前入射频率得到对应的散射特性矩阵;
7、根据对应的散射特性矩阵通过波数域解卷积和空间傅里叶反变换分离得到散射声场和入射声场。
8、在一实施例中,所述第一柱体声压全息面与所述第二柱体声压全息面长为13米,所述第一柱体声压全息面半径为1.5米,所述第一柱体声压全息面向外距离5厘米设置有传感器,所述第一柱体声压全息面向外距离50厘米设置有传感器,且所述传感器周圈等分12份,并沿所述第一柱体声压全息面轴向等分27列。
9、在一实施例中,所述根据所述总声压场通过空间傅里叶变换得到波数域的公式为:
10、
11、在一实施例中,所散射声场表达式:
12、
13、所述总声场表达式:
14、
15、其中,利用第一柱体声压全息面和第二柱体声压全息面得到总声场为:
16、pt1(r1,m,kz),和
17、pt2(r2,m,kz)
18、联合求解即可得到系数:
19、
20、
21、bmn=cmn-amn
22、在一实施例中,所述根据所述散射声场表达式和所述总声场表达式得到所述波数域的散射特性矩阵,进而形成不同入射角度和入射频率对应不同所述散射特性矩阵的对应关系式:
23、其中,所述散射声场表达式:
24、ps1(m,kz);
25、所述总声场表达式:
26、pt1(m,kz);
27、所述对应关系式为:
28、ps1(m,kz)=pt1(m,kz)*r(f0,θ,m,kz);
29、其中,所述散射特性矩阵表达式为:
30、r(f0,θ,m,kz)。
31、在一实施例中,所述根据当前入射角度和当前入射频率得到对应的散射特性矩阵步骤前,该方法还包括:
32、根据所述传感器接收的总声场估计当前入射角度和当前入射频率。
33、在一实施例中,通过fft变化方法估计所述当前入射频率;
34、通过mvdr波束估计所述当前入射角度。
35、在一实施例中,本发明还提供了一种入射声场和散射声场分离装置,所述装置包括:
36、获取模块,用于基于第一柱体声压全息面和第二柱体声压全息面获取总声压场,其中,所述第一柱体声压全息面为布设多个传感器形成柱体测量虚拟面,所述第二柱体声压全息面外套在所述第一柱体声全息量面外,且布设多个传感器形成测量虚拟面,所述传感器之间的距离小于半个散射波的波长;
37、计算模块,用于根据所述总声压场通过空间傅里叶变换得到波数域,并获得散射声场表达式和总声场表达式;还用于根据所述散射声场表达式和所述总声场表达式得到所述波数域的散射特性矩阵,进而形成不同入射角度和入射频率对应不同所述散射特性矩阵的对应关系式;还用于根据当前入射角度和当前入射频率得到对应的散射特性矩阵;还用于根据对应的散射特性矩阵通过波数域解卷积和空间傅里叶反变换分离得到散射声场和入射声场。
38、在一实施例中,本发明还提供了一种入射声场和散射声场分离装置,所述装置包括:处理器和存储器;
39、所述存储器中存储有可被所述处理器执行的应用程序,用于使得所述处理器执行如所述的入射声场和散射声场分离方法的步骤。
40、在一实施例中,本发明还提供了一种入射声场和散射声场分离装置,所述装置包括:处理器和存储器;
41、所述存储器中存储有可被所述处理器执行的应用程序,用于使得所述处理器执行如所述的入射声场和散射声场分离方法的步骤。
42、在一实施例中,本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现所述的入射声场和散射声场分离方法的步骤。
技术特征:
1.一种入射声场和散射声场分离方法,其特征在于,所述入射声场和散射声场分离方法:
2.根据权利要求1所述的入射声场和散射声场分离方法,其特征在于,所述第一柱体声压全息面与所述第二柱体声压全息面长为13米,所述第一柱体声压全息面半径为1.5米,所述第一柱体声压全息面向外距离5厘米设置有传感器,所述第一柱体声压全息面向外距离50厘米设置有传感器,且所述传感器周圈等分12份,并沿所述第一柱体声压全息面轴向等分27列。
3.根据权利要求2所述的入射声场和散射声场分离方法,其特征在于,所述根据所述总声压场通过空间傅里叶变换得到波数域的公式为:
4.根据权利要求3所述的入射声场和散射声场分离方法,其特征在于,所散射声场表达式:
5.根据权利要求4所述的入射声场和散射声场分离方法,其特征在于,所述根据所述散射声场表达式和所述总声场表达式得到所述波数域的散射特性矩阵,进而形成不同入射角度和入射频率对应不同所述散射特性矩阵的对应关系式:
6.根据权利要求5所述的入射声场和散射声场分离方法,其特征在于,所述根据当前入射角度和当前入射频率得到对应的散射特性矩阵步骤前,该方法还包括:
7.根据权利要求6所述的入射声场和散射声场分离方法,其特征在于,通过fft变化方法估计所述当前入射频率;
8.一种入射声场和散射声场分离装置,其特征在于,所述装置包括:
9.一种入射声场和散射声场分离装置,其特征在于,所述装置包括:处理器和存储器;
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现权利要求1至7任一项所述的入射声场和散射声场分离方法的步骤。
技术总结
本发明提供了一种入射声场和散射声场分离方法、系統、装置及其存储介质,所述入射声场和散射声场分离方法:基于第一柱体声压全息面和第二柱体声压全息面获取总声压场;根据所述总声压场通过空间傅里叶变换得到散射声场表达式和总声场表达式;形成不同入射角度和入射频率对应不同所述散射特性矩阵的对应关系式;根据对应的散射特性矩阵通过波数域解卷积和空间傅里叶反变换分离得到散射声场和入射声场。通过建立声压全息面测得总声压场,利用不同入射角度和入射频率对应不同所述散射特性矩阵的对应关系式,进而分离得到散射声场和入射声场,有助于解决现有技术中缺乏一种分离散射声场和入射声场的技术问题。
技术研发人员:安步潮,闫孝伟,何元安,张丽红,李鋆,宋昊
受保护的技术使用者:中国船舶集团有限公司系统工程研究院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!