一种基于卡尔曼滤波的伪卫星星历参数设计方法
本技术涉及伪卫星,特别是涉及一种基于卡尔曼滤波的伪卫星星历参数设计方法。
背景技术:
1、随着伪卫星技术的发展,当区域内因同频干扰的存在而无法接收到gnss卫星信号时,可以考虑采用无人机搭载伪卫星的方式当该区域上空搭建起临时的空间基准。当空基伪卫星平台搭建之后,需要向地面用户播发伪卫星位置信息,以保证用户可以进行定位解算。
2、然而,当采用空基伪卫星平台对地面用户进行信号播发时,伪卫星位置是动态变化的,即使采用无人机巡航的方式搭载伪卫星进行信号播发,因为风、空气阻力等,伪卫星的实时位置也与巡航的标准路线具有一定的误差,使得拟合出的星历参数无法精确表征伪卫星的运动。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种基于卡尔曼滤波的伪卫星星历参数设计方法。
2、一种基于卡尔曼滤波的伪卫星星历参数设计方法,所述方法包括:
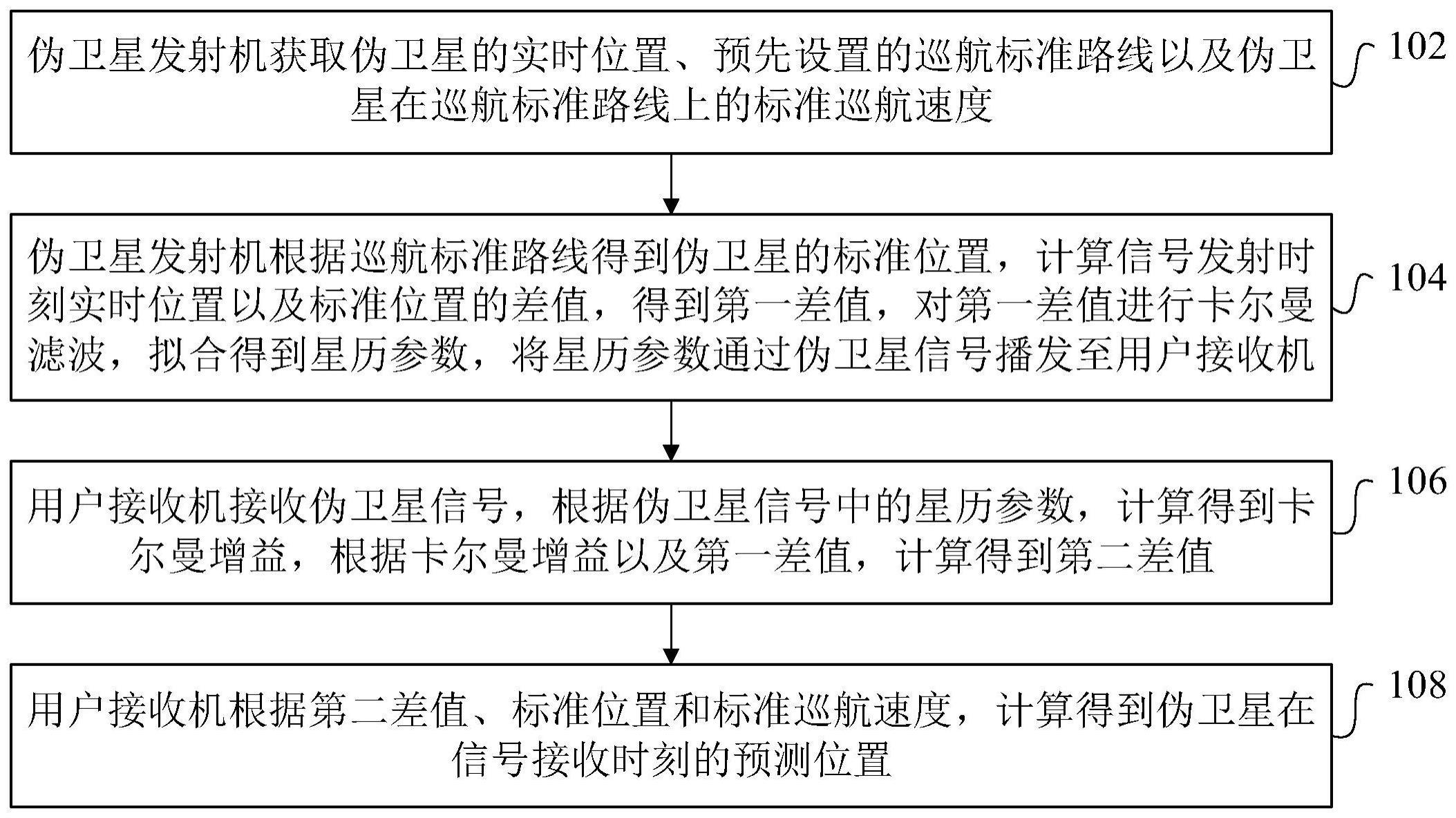
3、伪卫星发射机获取伪卫星的实时位置、预先设置的巡航标准路线以及伪卫星在巡航标准路线上的标准巡航速度;
4、伪卫星发射机根据所述巡航标准路线得到伪卫星的标准位置,计算信号发射时刻所述实时位置以及所述标准位置的差值,得到第一差值,对所述第一差值进行卡尔曼滤波,拟合得到星历参数,将所述星历参数通过伪卫星信号播发至用户接收机;所述星历参数包括所述第一差值、所述标准巡航速度和所述标准位置;
5、用户接收机接收所述伪卫星信号,根据所述伪卫星信号中的星历参数,计算得到卡尔曼增益,根据所述卡尔曼增益以及所述第一差值,计算得到第二差值;所述第二差值为信号接收时刻伪卫星的实时位置与标准位置之间的差值预测值;
6、用户接收机根据所述第二差值、所述标准位置和所述标准巡航速度,计算得到伪卫星在信号接收时刻的预测位置。
7、在其中一个实施例中,还包括:根据所述卡尔曼增益以及所述第一差值,计算得到第二差值为:
8、
9、
10、
11、其中,tk为信号接收时刻,t0为信号发射时刻,t为伪卫星位置采样周期,为t0时刻实时位置与标准位置在x方向上的差值,为t0时刻实时位置与标准位置在y方向上的差值,为t0时刻实时位置与标准位置在z方向上的差值,为tk时刻实时位置与标准位置在x方向上的差值预测值,为tk时刻实时位置与标准位置在y方向上的差值预测值,为tk时刻实时位置与标准位置在z方向上的差值预测值,为t0时刻x轴上的卡尔曼滤波值,为t0时刻y轴上的卡尔曼滤波值,为t0时刻z轴上的卡尔曼滤波值,h(·)为观测矩阵,k(n)为卡尔曼增益。
12、在其中一个实施例中,还包括:所述伪卫星在信号接收时刻的预测位置为:
13、
14、其中,为伪卫星在信号接收时刻的预测位置,为伪卫星在信号发射时刻的标准位置,为伪卫星在信号发射时刻的标准巡航速度,为第二差值。
15、在其中一个实施例中,还包括:根据所述伪卫星信号中的星历参数,计算得到卡尔曼增益;所述星历参数包括伪卫星运动模型的机动频率;所述伪卫星运动模型包括singer运动模型或jerk运动模型。
16、在其中一个实施例中,还包括:用户接收机接收所述伪卫星信号,根据所述星历参数和信号接收时刻,计算得到伪卫星时间。
17、在其中一个实施例中,还包括:用户接收机接收所述伪卫星信号,解译所述伪卫星信号中的星历参数,得到钟差参数和信号发射时刻;用户接收机根据所述钟差参数、信号发射时刻和信号接收时刻,计算得到伪卫星时间。
18、在其中一个实施例中,还包括:所述伪卫星时间为:
19、
20、其中,ttk为伪卫星时间,tk为信号接收时刻,为钟差参数,t0为信号发射时刻。
21、在其中一个实施例中,还包括:当所述巡航标准路线为直线时,根据伪卫星在巡航标准路线上的投影,得到伪卫星的标准位置;当所述巡航标准路线为弧线时,根据伪卫星和巡航标准路线圆心之间的连线在巡航标准路线上的交点,得到伪卫星的标准位置。
22、在其中一个实施例中,还包括:所述伪卫星信号内的星历参数以星历更新周期进行更新。
23、一种基于卡尔曼滤波的伪卫星星历参数设计装置,所述装置包括:
24、运动参数获取模块,用于伪卫星发射机获取伪卫星的实时位置、预先设置的巡航标准路线以及伪卫星在巡航标准路线上的标准巡航速度;
25、星历参数设计模块,用于伪卫星发射机根据所述巡航标准路线得到伪卫星的标准位置,计算信号发射时刻所述实时位置以及所述标准位置的差值,得到第一差值,对所述第一差值进行卡尔曼滤波,拟合得到星历参数,将所述星历参数通过伪卫星信号播发至用户接收机;所述星历参数包括所述第一差值、所述标准巡航速度和所述标准位置;
26、第二差值计算模块,用于用户接收机接收所述伪卫星信号,根据所述伪卫星信号中的星历参数,计算得到卡尔曼增益,根据所述卡尔曼增益以及所述第一差值,计算得到第二差值;所述第二差值为信号接收时刻伪卫星的实时位置与标准位置之间的差值预测值;
27、实时位置输出模块,用于用户接收机根据所述第二差值、所述标准位置和所述标准巡航速度,计算得到伪卫星在信号接收时刻的预测位置。
28、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
29、伪卫星发射机获取伪卫星的实时位置、预先设置的巡航标准路线以及伪卫星在巡航标准路线上的标准巡航速度;
30、伪卫星发射机根据所述巡航标准路线得到伪卫星的标准位置,计算信号发射时刻所述实时位置以及所述标准位置的差值,得到第一差值,对所述第一差值进行卡尔曼滤波,拟合得到星历参数,将所述星历参数通过伪卫星信号播发至用户接收机;所述星历参数包括所述第一差值、所述标准巡航速度和所述标准位置;
31、用户接收机接收所述伪卫星信号,根据所述伪卫星信号中的星历参数,计算得到卡尔曼增益,根据所述卡尔曼增益以及所述第一差值,计算得到第二差值;所述第二差值为信号接收时刻伪卫星的实时位置与标准位置之间的差值预测值;
32、用户接收机根据所述第二差值、所述标准位置和所述标准巡航速度,计算得到伪卫星在信号接收时刻的预测位置。
33、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
34、伪卫星发射机获取伪卫星的实时位置、预先设置的巡航标准路线以及伪卫星在巡航标准路线上的标准巡航速度;
35、伪卫星发射机根据所述巡航标准路线得到伪卫星的标准位置,计算信号发射时刻所述实时位置以及所述标准位置的差值,得到第一差值,对所述第一差值进行卡尔曼滤波,拟合得到星历参数,将所述星历参数通过伪卫星信号播发至用户接收机;所述星历参数包括所述第一差值、所述标准巡航速度和所述标准位置;
36、用户接收机接收所述伪卫星信号,根据所述伪卫星信号中的星历参数,计算得到卡尔曼增益,根据所述卡尔曼增益以及所述第一差值,计算得到第二差值;所述第二差值为信号接收时刻伪卫星的实时位置与标准位置之间的差值预测值;
37、用户接收机根据所述第二差值、所述标准位置和所述标准巡航速度,计算得到伪卫星在信号接收时刻的预测位置。
38、上述基于卡尔曼滤波的伪卫星星历参数设计方法,通过伪卫星接收机获取伪卫星的实时位置和在巡航标准路线上的标准位置,对信号发射时刻实时位置和标准位置的差值进行计算,得到第一差值,并对第一差值进行卡尔曼滤波,拟合得到星历参数,能够表征伪卫星运动特性、减少位置误差,将星历参数通过伪卫星信号播发至用户接收机,以使用户接收机通过星历参数计算信号接收时刻伪卫星实时位置,具体是通过用户接收机利用星历参数表征的卫星运动特性,计算信号接收时刻伪卫星的实时位置与标准位置之间的差值,得到第二差值,从而根据第二差值、标准位置和标准巡航速度,计算得到伪卫星在信号接收时刻的预测位置。本发明实施例,可以在伪卫星实时位置与标准巡航路线之间存在差值的情况下,准确表征伪卫星的位置。
- 还没有人留言评论。精彩留言会获得点赞!