一种用于海底电缆的方形阵列电磁探测及路由定位方法
本发明涉及了一种方形阵列电磁探测及路由定位方法,具体涉及一种用于海底电缆的方形阵列电磁探测及路由定位方法。
背景技术:
1、海底电缆是用于在海洋中输送交流或直流电流的专门设计生产的电缆,传输电流电压的类型取决于海洋输电线路的容量和长度等,可为岛屿、海洋平台和海底观测站等输送电能。海底电缆的敷设信息主要包括空间位置以及路由方向,空间位置指海底电缆的横向、垂向位置信息,路由指海底电缆在海底从起点到终点的路径,呈条带状。
2、近年来,海底电缆的使用越来越多,并且在未来仍将继续增加。将海底电缆埋设于海床下,是保护海底电缆安全最有效的方法。然而,在海底电缆敷设后,由于冲刷、腐蚀、海底地质灾害等原因,会出现不同程度的位移、裸露以及其他形式的自然破坏;同时,随着海洋经济活动及开发活动的日益频繁,人为损坏的事故正急剧增加。海缆工程是海洋产业技术中最为复杂困难的大型工程之一,和陆地电缆相比,海底电缆工程更为复杂困难,其发生故障后,往往不能立即完成故障检测,而且维修周期漫长,将造成难以预料的影响。因此,针对海底电缆的日常检查与维护等工作越来越重要。而准确、快速掌握海底电缆的敷设信息则是其他工作开展的必要前提,可以及时为日常维护检修提供宝贵基础资料,也可以用于服务应急抢险修复工作,以保障海底电缆的正常运行。然而目前存在的技术问题主要包括海底电缆探测作业中感应线圈参数与感应电动势的关系难以精确确定以及海底电缆路由定位不准确等问题。
技术实现思路
1、为了解决背景技术中存在的问题,本发明所提供一种用于海底电缆的方形阵列电磁探测及路由定位方法。本发明针对海底电缆探测和路由定位的需求,采用有源探测法开展探测作业,有源探测法也称为交流磁场探测法,其基本原理是在海底电缆金属层上加载一定频率的交流电流,海底电缆就会产生向周围空间传播的电磁场,在适当的距离内通过特定的探测器在适当的距离内接收海底电缆周围的电磁波信号并进行处理分析,进而确定大地坐标系下海底电缆的位置信息。应用有源交流磁场探测的原理,设计了基于方形磁探测器阵列的海底电缆探测定位算法,最终输出信息主要包括大地坐标系下海底电缆轨迹、路由角度、路由点经纬度信息、相对于海底平面的埋设深度以及相对于海平面的埋设深度。本发明综合考虑了水下探测平台在水下开展探测作业时方形磁探测器阵列与海底电缆的各种相对位置关系,使得探测定位结果更加准确,为海底电缆的日常运营和维护工作提供了一套工作精度较高的海底电缆探测及路由定位方案。
2、本发明采用的技术方案是:
3、本发明方形阵列电磁探测及路由定位方法包括如下步骤:
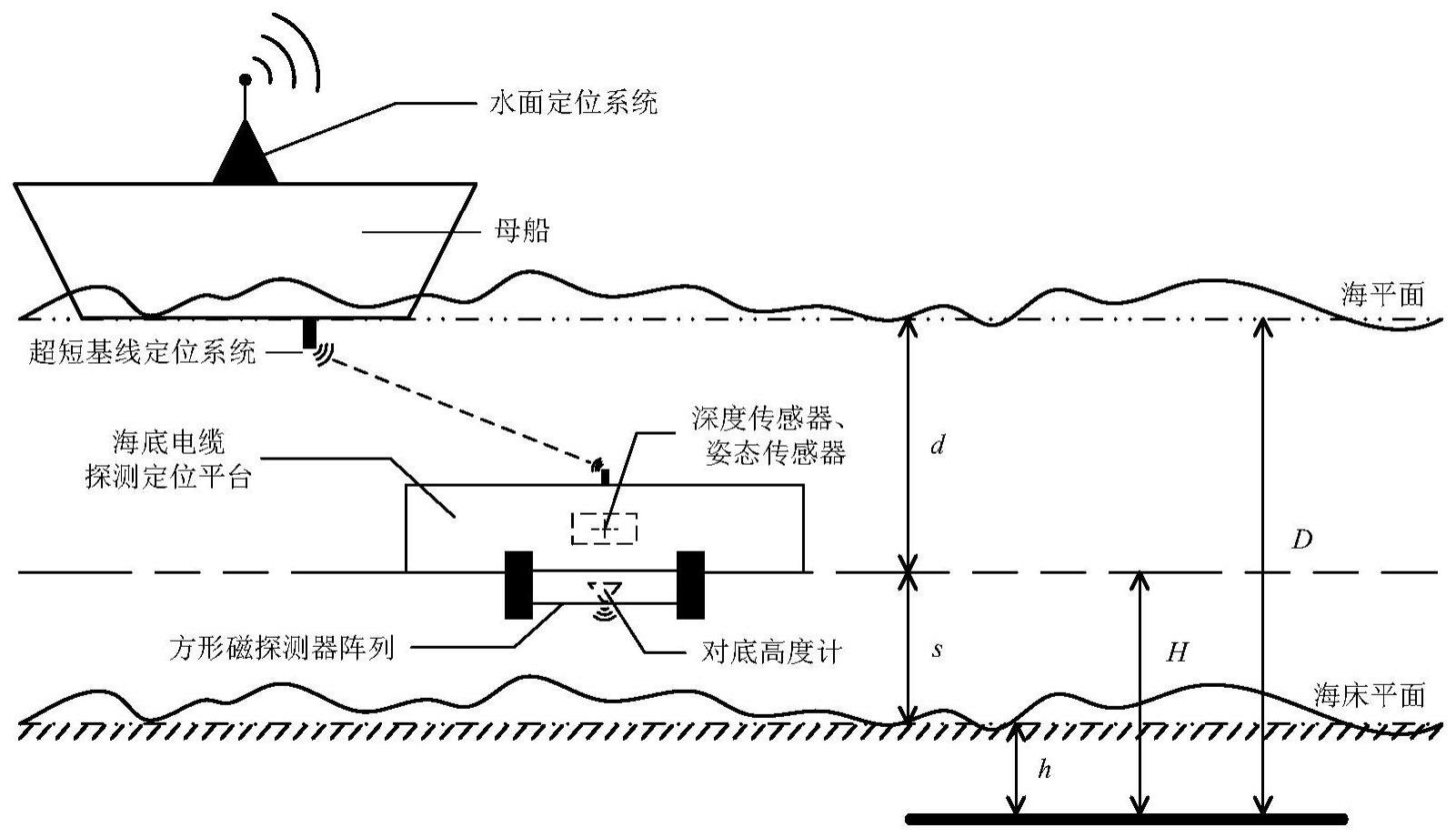
4、步骤一:将安装有水面定位系统和超短基线定位系统的母船航行至海底电缆的上方海面,超短基线定位系统包括第一信号收发器和第二信号收发器,第一信号收发器安装在母船底部;将海底电缆探测系统布置在海底电缆的上方海水中,海底电缆探测系统包括海底电缆探测定位平台、方形磁探测器阵列、对底高度计、深度传感器、姿态传感器和第二信号收发器。
5、步骤二:通过水面定位系统探测母船的位置信息;通过方形磁探测器阵列探测海底电缆产生的电磁信号,通过对底高度计探测海底电缆探测定位平台相对于海底平面的垂直距离,通过深度传感器探测海底电缆探测定位平台相对于海平面的垂直距离,通过姿态传感器探测海底电缆探测定位平台的艏向偏角,通过第一信号收发器和第二信号收发器探测海底电缆探测定位平台相对于母船的位置信息。
6、步骤三:根据海底电缆产生的电磁信号,使用海底电缆相对探测定位方法获得海底电缆和方形磁探测器阵列的相对位置信息。
7、步骤四:根据海底电缆和方形磁探测器阵列的相对位置信息、母船的位置信息、海底电缆探测定位平台相对于海底平面的垂直距离、海底电缆探测定位平台相对于海平面的垂直距离、海底电缆探测定位平台的艏向偏角以及海底电缆探测定位平台相对于母船的位置信息,使用海底电缆绝对探测定位方法获得海底电缆的位置信息,最终实现海底电缆的路由定位。位置信息均为大地坐标系下的位置。
8、所述的步骤一中,海底电缆探测定位平台水平布置,方形磁探测器阵列和对底高度计安装在海底电缆探测定位平台的底面,深度传感器和姿态传感器安装在海底电缆探测定位平台的内部,第二信号收发器安装在海底电缆探测定位平台的顶面;方形磁探测器阵列包括。刚性正方形框架和四个线圈式磁探测器,刚性正方形框架安装在海底电缆探测定位平台的底面,四个线圈式磁探测器分别垂向并对称布置在刚性正方形框架的四个底面顶点上;四个线圈式磁探测器依次为1号探测器、2号探测器、3号探测器和4号探测器。安装时确保1、3号探测器的连线与水下探测平台的艏向中线平行,2、4号探测器的连线与水下探测平台的横向中线平行,方形磁探测器阵列中心尽量靠近水下探测平台的底部中心。水下探测平台进行探测作业时,尽量保持与海底平面平行。
9、所述的步骤三中,根据海底电缆产生的电磁信号,使用海底电缆相对探测定位方法获得海底电缆和方形磁探测器阵列的相对位置信息,即分别使用横向距离探测算法获得海底电缆相对于方形磁探测器阵列的横向距离γ0,使用垂向距离探测算法获得海底电缆相对于方形磁探测器阵列的垂向距离h,使用艏向偏角探测算法获得海底电缆相对于方形磁探测器阵列的艏向偏角ψ,具体如下:
10、
11、其中,a、b和c分别为海底电缆相对探测定位方法的第一系数矩阵、第二系数矩阵和第三系数矩阵;γ0为横向距离矩阵,γ0=[γ γ]t,γ为方形磁探测器阵列中心点到海底电缆所在垂面的横向距离;ψ为艏向偏角矩阵,ψ=[sin|ψ|cos|ψ|]t,|ψ|∈[0°,90°);η为坐标矩阵,η=[x y]t;以方形磁探测器阵列中心点为原点o,方形磁探测器阵列中心点与1号探测器的连线为x轴正半轴,方形磁探测器阵列中心点与2号探测器的连线为y轴正半轴,方形磁探测器阵列中心点与海底平面之间的垂线为z轴正半轴建立相对坐标系,x和y分别为相对坐标系下方形磁探测器阵列中心点向海底电缆作垂线所得交点的x轴坐标和y轴坐标;z为相对坐标系下方形磁探测器阵列中心点向海底电缆作垂线所得交点的z轴坐标;由于实际中海底电缆探测定位平台一般是从海底电缆的一端到另一端正向开展探测作业,所以|ψ|∈[0°,90°),结合方形磁探测器阵列与海底电缆的相对位置关系,当方形磁探测器阵列运动方向相对于海底电缆走向右倾时定义ψ=|ψ|,当方形磁探测器阵列运动方向相对于海底电缆走向左倾时定义ψ=-|ψ|;x轴正向为探测平台的前进方向。
12、海底电缆相对于方形磁探测器阵列的横向距离γ具体如下:
13、γ=[γ1 γ2 γ3 γ4]t
14、其中,γ1、γ2、γ3及γ4分别为1、2、3、4号探测器到海底电缆所在垂面的横向距离。
15、所述的海底电缆相对探测定位方法的第一系数矩阵a、第二系数矩阵b和第三系数矩阵c根据1、2、3、4号探测器输出的感应电动势及其绝对值的最大值确定,具体如下:
16、在实际的海底电缆探测作业中,可能出现四根探测器全部位于海底电缆一侧、一根探测器位于海底电缆一侧而另外三根探测器位于海底电缆另一侧、两根探测器位于海底电缆一侧而另外两根探测器位于海底电缆另一侧之一的情况,更具体地分析,通过讨论v1、v2、v3、v4以及|v1|max、|v2|max、|v3|max、|v4|max的大小关系,海底电缆与方形磁探测器阵列的相对位置关系可总结划分共16种情况。
17、a)若v1·v3>0,v2·v4>0,|v1|max>|v3|max,|v2|max>|v4|max,则海底电缆与方形磁探测器阵列为第一种相对位置关系,此时:
18、
19、其中,v1、v2、v3、v4分别为1、2、3、4号探测器输出的感应电动势;|v1|max、|v2|max、|v3|max、|v4|max分别为1、2、3、4号探测器输出的感应电动势的绝对值的最大值;
20、b)若v1·v3>0,v2·v4>0,|v1|max<|v3|max,|v2|max>|v4|max,则海底电缆与方形磁探测器阵列为第二种相对位置关系,此时:
21、
22、c)若v1·v3>0,v2·v4>0,|v1|max<|v3|max,|v2|max<|v4|max,则海底电缆与方形磁探测器阵列为第三种相对位置关系,此时:
23、
24、d)若v1·v3>0,v2·v4>0,|v1|max>|v3|max,|v2|max<|v4|max,则海底电缆与方形磁探测器阵列为第四种相对位置关系,此时:
25、
26、e)若v1·v3<0,v2·v4>0,|v1|max>|v3|max,|v2|max>|v4|max,则海底电缆与方形磁探测器阵列为第五种相对位置关系,此时:
27、
28、f)若v1·v3<0,v2·v4>0,|v1|max>|v3|max,|v2|max<|v4|max,则海底电缆与方形磁探测器阵列为第六种相对位置关系,此时:
29、
30、g)若v1·v3>0,v2·v4<0,|v1|max>|v3|max,|v2|max>|v4|max,则海底电缆与方形磁探测器阵列为第七种相对位置关系,此时:
31、
32、h)若v1·v3>0,v2·v4<0,|v1|max<|v3|max,|v2|max>|v4|max,则海底电缆与方形磁探测器阵列为第八种相对位置关系,此时:
33、
34、i)若v1·v3<0,v2·v4>0,|v1|max<|v3|max,|v2|max>|v4|max,则海底电缆与方形磁探测器阵列为第九种相对位置关系,此时:
35、
36、j)若v1·v3<0,v2·v4>0,|v1|max<|v3|max,|v2|max<|v4|max,则海底电缆与方形磁探测器阵列为第十种相对位置关系,此时:
37、
38、k)若v1·v3>0,v2·v4<0,|v1|max>|v3|max,|v2|max<|v4|max,则海底电缆与方形磁探测器阵列为第十一种相对位置关系,此时:
39、
40、l)若v1·v3>0,v2·v4<0,|v1|max<|v3|max,|v2|max<|v4|max,则海底电缆与方形磁探测器阵列为第十二种相对位置关系,此时:
41、
42、m)若v1·v3<0,v2·v4<0,|v1|max>|v3|max,|v2|max>|v4|max,则海底电缆与方形磁探测器阵列为第十三种相对位置关系,此时:
43、
44、n)若v1·v3<0,v2·v4<0,|v1|max<|v3|max,|v2|max>|v4|max,则海底电缆与方形磁探测器阵列为第十四种相对位置关系,此时:
45、
46、o)若v1·v3<0,v2·v4<0,|v1|max<|v3|max,|v2|max<|v4|max,则海底电缆与方形磁探测器阵列为第十五种相对位置关系,此时:
47、
48、p)若v1·v3<0,v2·v4<0,|v1|max<|v3|max,|v2|max<|v4|max,则海底电缆与方形磁探测器阵列为第十六种相对位置关系,此时:
49、
50、当垂直放置的单根探测器位于海底电缆的不同侧时,磁感线穿过感应线圈的方向相反,由法拉第电磁感应定律可知,海底电缆两侧探测器的感应电动势的符号也将相反;当方形磁探测器阵列距离海底平面的垂直距离一定时,探测器距离海底电缆所在垂面的横向距离绝对值越大,其感应电动势越微弱,感应电动势绝对值越小;实际中,水下探测平台一般是从海底电缆的一端到另一端正向开展探测作业,所以可认为方形磁探测器阵列运动方向与海底电缆路由方向的夹角的绝对值不会超过90°。考虑到以上因素,将方形磁探测器阵列与海底电缆的相对位置关系划分为16种情况。
51、所述的1、2、3、4号探测器输出的感应电动势的绝对值的最大值|v1|max、|v2|max、|v3|max、|v4|max具体如下:
52、
53、其中,|vi|max为i号探测器输出的感应电动势的绝对值的最大值,i=1,2,3,4;λ为预设感应电动势初始系数;γi为i号探测器到海底电缆所在垂面的横向距离;为i号探测器处的电磁衰减系数;f为交流电电流频率;μ为海水磁导率;σ为海水电导率。
54、有源交流海底电缆会激发产生交变电磁场,结合方形磁探测器阵列与空间磁感线的相对位置关系以及海水中电磁场的衰减规律,可得探测器输出的感应电动势的绝对值的最大值,其值与探测器线圈匝数、线圈有效面积(与磁感线方向垂直的面积分量)、真空磁导率、交流电电流最大值以及其他一些因素有关,由于四根探测器统一规格生产制作,所以认为四根探测器的感应电动势初始系数实时相同。
55、所述的步骤三中,根据海底电缆和方形磁探测器阵列的相对位置信息、母船的位置信息、海底电缆探测定位平台相对于海底平面的垂直距离、海底电缆探测定位平台相对于海平面的垂直距离、海底电缆探测定位平台的艏向偏角以及海底电缆探测定位平台相对于母船的位置信息,使用海底电缆绝对探测定位方法获得海底电缆的位置信息,即分别使用埋深定位算法获取海底电缆相对于海底平面的埋设深度以及相对于海平面的埋设深度,使用路由方向定位算法获取海底电缆的各个路由角度,使用路由点定位算法获取海底电缆的各个路由点经纬度信息,使用路由点插值拟合方法获取海底电缆轨迹。
56、所述的使用埋深定位算法获取海底电缆相对于海底平面的埋设深度以及相对于海平面的埋设深度,具体如下:
57、a)海底电缆相对于海底平面的埋设深度h:
58、h=h-s
59、其中,h为海底电缆相对于方形磁探测器阵列的垂向距离;s为海底电缆探测定位平台相对于海底平面的垂直距离,由于对底高度计和方形磁探测器阵列均安装在探测定位平台底部,且探测定位平台在作业时为水平作业,所以s也可认为是方形磁探测器阵列到海底平面的垂向距离;
60、b)海底电缆相对于海平面的埋设深度d:
61、d=dd+δd
62、d=dd+h
63、其中,d为海底电缆探测定位平台相对于海平面的垂直距离,由于深度传感器一般安装在探测定位平台的舱内,所以方形磁探测器阵列到海平面的垂向距离应为深度传感器到海平面的垂向距离与深度计到方形磁探测器阵列的垂向距离之和;dd为深度传感器到海平面的垂向距离;δd为深度传感器到方形磁探测器阵列的垂向距离。
64、所述的使用路由方向定位算法获取海底电缆的各个路由角度,针对海底电缆的每个路由点,具体如下:
65、ψc=ψ+ψd
66、其中,ψc为大地坐标系下海底电缆的路由点的路由角度;ψ为海底电缆相对于方形磁探测器阵列的艏向偏角;ψd为海底电缆探测定位平台的艏向偏角,ψd∈(-180°,180°],逆时针偏转为正,顺时针偏转为负,由于方形磁探测器阵列在安装时已保证1、3号探测器的连线与探测定位平台的艏向中线平行,所以ψd也是大地坐标系下方形阵列的艏向偏角。
67、所述的使用路由点定位算法获取海底电缆的各个路由点经纬度信息,针对海底电缆的每个路由点,具体如下:
68、e=ed+γcosψc
69、n=nd-γsinψc
70、其中,e为大地坐标系下海底电缆的路由点的纬度,n为大地坐标系下海底电缆的路由点的经度,路由点的经纬度信息为路由点坐标(e,n);ed为超短基线定位系统的第一信号收发器和第二信号收发器与水面定位系统共同输出的大地坐标系下海底电缆探测定位平台的纬度;nd为为超短基线定位系统与水面定位系统共同输出的大地坐标系下海底电缆探测定位平台的经度,由于大地坐标系下方形磁探测器阵列与海底电缆探测定位平台的绝对位置差别主要集中在垂直方向,所以(ed,nd)也可认为是大地坐标系下方形磁探测器阵列的经纬度信息;γ为方形磁探测器阵列中心点到海底电缆所在垂面的横向距离;ψc为大地坐标系下海底电缆的路由点的路由角度。
71、所述的使用路由点插值拟合方法获取海底电缆轨迹,具体为通过海底电缆的各个路由点经纬度信息,使用路由点插值拟合方法进行插值拟合处理获得大地坐标系下海底电缆轨迹。本发明的有益效果是:
72、1、本发明的方形磁探测器阵列降低了制造工艺的复杂程度,可适用于大批量生产应用,提高了工程实用性。
73、2本发明所采用的算法引入了感应电动势初始系数,该系数可以有效避免四根探测器共有误差(比如水下探测平台轻微横滚、侧倾导致四根探测器的有效磁通面积发生同步变化,探测器的生产制造误差,海底泥沙岩石对电磁波传播造成的误差等)对探测结果的影响,提高了本方案的鲁棒性。
74、3、本发明分析了方形磁探测器阵列与海底电缆的16种相对位置关系,并给出了各个情况下相应的解算算法,提高了本方案的适应性。
75、4、本发明所采用的水下探测平台可以为rov、auv或uuv等水下设备,仅需保证水下探测平台在工作时保持运动姿态相对稳定、海底电缆通电电流参数已知,对海底电缆的缆宽、型号等参数无特殊要求,提高了本方案的通用性。
76、5、本发明引入了对底高度计、深度计、超短基线定位系统以及水面定位系统,可以精确实现大地坐标系下海底电缆探测及路由定位作业。
77、6、在海底电缆探测作业中,本发明方法可以有效改善感应线圈参数与感应电动势的关系难以精确确定、路由定位不准确等问题,在降低装置复杂度的基础上提高探测精度。
- 还没有人留言评论。精彩留言会获得点赞!