一种模拟侦察和规避的水下目标回波信号全流程仿真方法与流程
本发明涉及水声工程,尤其涉及一种智能化模拟侦察和规避的水下目标回波信号全流程仿真方法。
背景技术:
1、声纳阵列信号模拟器可以在海洋水声环境、目标态势任意设定的情况下,通过计算机或信号处理机快速计算,模拟产生声纳阵列信号数据,可为水声信号处理算法检验、声纳探测性能推演评估,以及声纳员训练与考核等提供重要数据支撑,大大节省声纳技术开发、声纳操作使用训练和探测性能评估的成本,作为水声领域的一种数字孪生技术,具有十分重要的应用前景。
2、声纳信号模拟器是一种相对独立的设备,一般由一台计算机(工控机)或dsp信号处理机完成仿真背景设置、阵列信号仿真,以及阵列仿真信号存储或输出的一体化设备,提供给后续声纳信号处理和声纳显控台。
3、目前,声纳信号模拟器是在信号模拟仿真开始之前,根据仿真任务一次性进行:海洋环境参数、声纳阵型和工作参数,以及声纳自平台和目标平台的运动航向、航速等参数设置。仿真开始后,模拟器按照预设的仿真态势进行阵列数据仿真,仿真过程中不可改变目标或自平台的运动态势。
4、然而,在海上实际对抗环境下,水下目标平台装备有侦察声纳和远程警戒声纳,一旦水面反潜舰艇开启主动声纳,可以在相对远的距离上侦察发现水面舰艇,确定其方位,然后采取规避措施,对抗反潜舰艇的主动声纳探测:根据侦察到的水面舰艇平台方位,改变自身的运动航向,尽量以最小回波强度的方位(舷角)对着反潜舰艇,最大限度地减小主动声纳探测自身的距离。在水下目标采取对抗措施的情况下,主动探测声纳阵列信号会发生很大变化,从而大大改变声纳探测效果。假如声纳阵列信号模拟器,不能体现这种常见的对抗功能,则其信号模拟的功能和效果受到很大影响,应用范围也受到很大限制。
5、另外,现有的主动声纳目标回波信号仿真方法存在以下不足:(1)现有的主动声纳目标回波信号仿真大多是在单向水声信道仿真、多普勒特性仿真的基础上,考虑两倍的传播时延、和多普勒频移得到的,没有考虑主动声纳信号在往返传播过程中平台相对运动姿态变化、往返信道不同产生的接收信号误差,造成目标回波的波形特性、多普勒特性,以及目标回波强度特性等不能体现真实的信号产生效果、模拟不准确。(2)声纳接收到的目标回波信号波形和信号强度除了需要符合海洋信道传播的衰减特性以外,目标回波信号的波形特性目标回波信号的波形体现、目标强度特性还与目标的形状结构和材料、与信号入射方向的(即目标强度ts曲线)变化等有关,这些回波信号特性是主动声纳信号仿真的核心之一。要很好地体现这些信号体现,对于计算速度要求极高的实时仿真模拟器,既非常重要,又非常困难,也是目前主动声纳目标回波信号仿真技术尚为解决的重要难题。
技术实现思路
1、本发明主要解决海上动态对抗背景下主动声纳阵列信号一体化仿真系统(模拟器)面临的水下平台自主侦察和侦察信息模拟、自主规避决策模拟,以及主动声纳信号从“发射-发射段信道传播-多普勒影响-目标反射-接收段海洋信道-多普勒影响-接收”全流程的动态仿真技术问题,提出一种模拟侦察和规避的水下目标回波信号全流程仿真方法,以达到提高水下目标回波波形特性、强度特性和多普勒特性模拟的准确度和可靠性,并通过智能化模拟水下目标平台对主动声纳信号的侦察和规避机动决策,使得基于单一计算设备的一体化模拟器输出信号更加符合海上实际对抗背景,可更好地满足对抗效果推演评估的实际需要。
2、本发明提供了一种模拟侦察和规避的水下目标回波信号全流程仿真方法,包括:
3、1、一种模拟侦察和规避的水下目标回波信号全流程仿真方法,其特征在于,所述仿真方法包括:
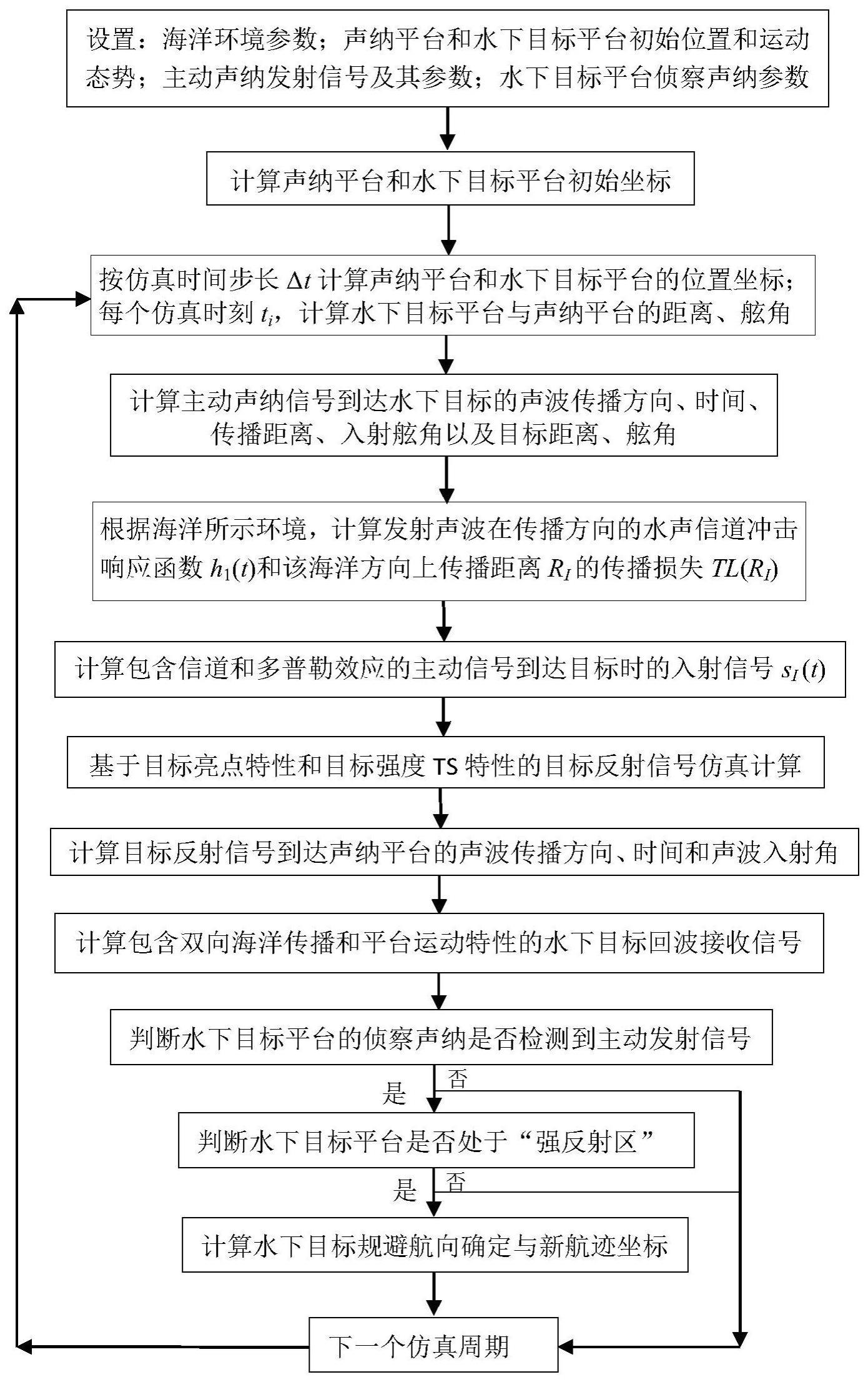
4、s1、设置仿真背景参数;所述仿真背景参数包括:海洋水声环境参数、声纳平台和水下目标平台运动态势,以及主动声纳参数、水下目标平台侦察声纳参数;
5、s2、计算声纳平台和水下目标平台的位置坐标;对每个仿真时刻计算声纳平台和水下目标平台的距离、舷角;
6、s3、基于解相遇原理,计算主动声纳信号到达水下目标的声波传播方向、到达时间、传播距离、入射舷角,以及信号到达目标时刻的目标距离和目标舷角;
7、s4、根据所述海洋水声环境参数,计算所述主动声纳信号到达目标的发射段水声信道冲击响应函数,以及发射信号沿该海洋传播方向到达目标距离时的传播损失;
8、s5、根据所述发射段水声信道冲击响应函数,卷积计算所述主动声纳信号到达目标时的入射信号,将所述入射信号进行时域多普勒处理,以完成包括发射段信道传播和多普勒影响的信号仿真;
9、s6、对包含发射段多普勒影响的入射信号,基于水下目标亮点特性和目标强度特性计算目标的反射信号;
10、s7、计算所述反射信号返回声纳平台的声波传播方向、到达时刻和声波入射角以及所述反射信号返回声纳平台时刻声纳平台位于目标的舷角;计算返回段水声信道冲击响应函数;卷积计算目标反射信号到达声纳平台接收点的回波信号,对所述回波信号进行时域多普勒处理,完成一个周期的水下目标回波信号仿真;
11、s8、智能化模拟水下目标平台的侦察声纳对所述主动声纳信号的检测和方位估计,自主判断所述侦察声纳是否能够检测到所述主动声纳信号,若是,则进行侦察声纳的侦察方位模拟;若否,则重新执行步骤s2至s7进行下一仿真周期;
12、s9、根据所述侦察方位模拟判断水下目标平台是否处于特殊反射区,若是,则计算水下目标规避航向及确定新航迹坐标,若否,则重新执行步骤s2至s8进行下一仿真周期。
13、进一步地,所述设置仿真背景参数,包括:海洋水声环境参数设置包括:模拟海区的海底地形,海区位置点(x,y)的海区深度为z(x,y)、底质参数、海洋声速剖面c(z)。根据侦察声纳工作频段估计海洋环境噪声nl;水下目标平台运动态势设置包括:水下目标平台的预设初始航向ht、航速vt,水下目标相对声纳平台的初始舷角θs0、初始距离r0、水下平台深度dq;水下目标平台的强度曲线ts(θt);水下目标平台的亮点结构及其反射参数;水下目标平台的高强度反射区ψg、“中强度反射区ψz、弱反射区ω;水下平台在线速度vt时的旋回半径为rx;声纳平台及其主动声纳参数设置包括:声纳平台航向hs、航速vs;主动声纳发射声源级sl、发射信号s(t)、脉冲宽度δt、脉冲发射重复周期t;收发阵深度ds;假设主动声纳全向发射脉冲信号;水下目标平台侦察声纳参数设置包括:侦察阵列指向性指数di、检测阈dt、方位估计误差δθ。
14、进一步地,所述计算声纳平台和水下目标平台的位置坐标,所述位置坐标包括:初始位置坐标、按照仿真步长更新的动态仿真时刻位置坐标;以及所述对每个仿真时刻计算声纳平台和水下目标平台的距离、舷角:
15、假设仿真开始时刻为t=0,声纳平台的初始直角坐标为xs(0)=0,ys(0)=0;
16、根据初始态势计算水下目标平台t0的初始坐标:
17、
18、按仿真时间步长δt计算声纳平台和水下目标平台的位置坐标,ti=ti-1+δt时刻,声纳平台和水下目标平台的坐标可由下式计算:
19、声纳平台的位置坐标:
20、水下目标平台的位置坐标:
21、所述对每个仿真时刻计算声纳平台和水下目标平台的距离、舷角包括:
22、ti时刻水下目标平台与声纳平台的距离为:
23、
24、ti时刻水下目标平台与声纳平台的舷角为:
25、水下目标平台的舷角:
26、声纳平台的舷角:
27、进一步地,所述步骤s3,包括:
28、假设t0时刻主动声纳全向发射脉冲信号,由于水下目标匀速直线运动,声波到达目标时的舷角会向目标运动方向产生偏移,偏离角δθq大小为:
29、
30、假设发射信号到达目标的声传播时延为τi,则:
31、cτicos△θq+vtτicosθq0=r0 (8)
32、则,s0点到tt点的声传播时延τi为:
33、
34、因此,发射信号到达水下目标的时间及其传播距离为:
35、t=t0+τi=τi (10-1)
36、ri=cτi (10-2)
37、此时,声纳平台位置s1和水下目标平台tt的坐标分别为:
38、
39、
40、声纳平台与水下目标平台的距离为:
41、
42、声波到达水下目标的入射舷角θqi为:
43、θqi=θq0+δθq (14)
44、水下目标相对于声纳平台的舷角为:
45、
46、进一步地,所述步骤s4,包括:根据海洋地形数据、海底地质数据、声速剖面数据和声纳工作频率,调用海洋声传播模型,计算得到发射声波在传播方向s0—tt上的水声信道冲击响应函数h1(t)、以及该海洋方向上传播距离ri的传播损失tl(ri);所述海洋声传播模型可为bellhop、kraken、ram、for3d中的一种。
47、进一步地,所述步骤s5包括:
48、计算主动发射信号到达目标时的入射信号si(t);
49、发射信号到达目标的入射波信号为发射信号与信道冲击响应函数的卷积:
50、
51、对入射信号进行时域多普勒处理;
52、双方平台运动引起的多普勒频移,时域上对应信号波形的变化。多普勒效应,使得入射波的信号波形变化为:
53、si(t)=si1[(1+△id)t] (16-2)
54、其中δid为多普勒因子:
55、
56、进一步地,所述步骤s6,包括:假设水下目标回波特性等效为n个亮点的线型结构、每个亮点的反射系数为ai、水下目标强度水入射角变化的曲线为ts(θ),则入射声信号从水下目标的反射波为:
57、
58、其中,τi为第i个亮点相对于参考亮点的时延,为服从0~2π均匀分布的随机相位;假设参考亮点位于目标的头部、入射角以目标航向为参考,且第i个亮点相对于参考亮点的距离为di,则有:
59、τi(θqi)=dicosθqi/c,0≤θqi≤π (19)
60、式中,是对回波信号幅度归一化。
61、进一步地,所述步骤s7包括:
62、所述计算目标反射信号到达声纳平台的声波传播方向、到达时间和声波入射角以及所述反射信号返回声纳平台时刻声纳平台位于目标的舷角,包括:
63、
64、目标反射波从tt点返回声纳平台的声传播时延τr为:
65、
66、此时,此时声纳平台sr的坐标为:
67、
68、目标回波到达声纳平台的入射舷角θsr为:
69、θsr=θs1+δθs (23)
70、此时,声纳平台相对于目标的舷角为:
71、
72、所述计算返回段水声信道冲击响应函数;卷积计算目标反射信号到达声纳平台接收点的回波信号,对所述回波信号进行时域多普勒处理,包括:
73、根据海洋地形数据、海底地质数据、声速剖面数据和声纳工作频率,调用海洋声传播模型,计算得到发射声波在传播方向st—tr上的水声信道冲击响应函数h2(t);
74、计算目标反射信号sr(t)经tt—sr水声信道返回声纳平台的目标回波信号
75、
76、考虑返回过程的多普勒影响,则声纳接收到的目标回波信号波形变化为:
77、r(t)=rr[(1+△rd)t] (25-2)
78、其中δrd为主动信号返回阶段的多普勒因子,由下式表示:
79、
80、进一步地,所述步骤s8,包括:
81、根据被动声纳方程:
82、sl-(nl-di+dt)=tl (27)
83、式中,sl为主动声纳发射信号的声源级、tl为发射信号到达水下目标平台的传播损失、nl为背景噪声级、di为侦察声纳的指向性指数、dt为侦察声纳的检测阈;上式的左边是代表声纳探测性能的优质因数,用fom表示;
84、如果fom≥tl(ri),则侦察声纳可以检测到主动声纳信号;
85、所述侦察声纳的方位估计模拟,包括:
86、假设侦察声纳的方位估计误差为δθ,主动发射信号到达目标时刻的入射舷角θqi已由(14)式计算得到,则侦察声纳检测到的主动声纳信号入射方位,即舷角为:
87、θi=θqi+δθ (28)。
88、进一步地,所述步骤s8包括:自主判断侦察声纳是否能够检测到所述主动声纳发射信号方法包括:根据被动声纳方程:
89、sl-(nl-di+dt)=tl (27)
90、式中,sl为主动声纳发射信号的声源级、tl为发射信号到达水下目标平台的传播损失、nl为背景噪声级、di为侦察声纳的指向性指数、dt为侦察声纳的检测阈;上式的左边是代表声纳探测性能的优质因数,用fom表示;
91、根据权利5中的步骤4所述,已经计算得到发射声波到达目标位置的传播损失tl(ri),如果fom≥tl(ri),则侦察声纳可以检测到主动声纳信号,否则侦察声纳未检测到主动声纳信号;
92、若侦察声纳检测到主动声纳信号,则自主模拟侦察声纳检测到主动声纳信号的波达方向(舷角)方法包括:
93、假设侦察声纳的方位估计误差为δθ,主动发射信号到达目标时刻的入射舷角θqi已由(14)式计算得到,则侦察声纳估计实际到达的主动声纳发射信号入射舷角为:
94、θi=θqi+δθ (28)。
95、进一步地,所述步骤s9,包括:将水下目标平台所处的区域按照反射强度ts划分为:高强反射区、中强反射区和弱反射区,再判断水下目标平台的侦察声纳检测到主动声纳信号的情况下,所述水下目标平台是否处于“高强反射区”;假如信号的入射角θi位于高强度反射区ψg和中强度反射区ψz,则应采取规避航向,保证下次到达的主动声纳探测信号入射角位于弱强度反射区ω,提高水下目标平台的隐蔽性;否则,保证原有航向,不进行规避机动;根据侦察得到的主动声纳信号入射角θi,在根据以下确定的弱强度反射区中心角θo,考虑入射角的正负号,即:信号来自右舷或左舷,规避转向角大小按下式计算:
96、△ht=|θ0-|θi|| (29)
97、(1)若主动声纳信号位于高强度反射区ψg
98、以最小的转向角将远离探测信号的弱强度反射区,即尾部区域,对着主动声纳信号方向,此时,弱强度反射区ω的中心角θo=180°;规避航向为:
99、htg=ht±δht (30-1)
100、上式中,当主动声纳信号来自左舷时取“+”(右转);来自右舷时取“-”(左转);
101、(2)若主动声纳信号位于中强度反射区ψz,且侦察到的主动声纳信号位于小舷角,即来自水下平台的侧前方时,θo=0°;规避航向为:
102、htg=ht±δht (30-2)
103、上式中,当主动声纳信号来自左舷时取“-”(左转)、来自右舷时取“+”(右转);
104、(3)若主动声纳信号位于中强度反射区ψz,且侦察到的主动声纳信号位于大舷角,即来自水下平台的侧后方时,θo=180°;规避航向为:
105、htg=ht±δht (30-3)
106、上式中,当主动声纳信号来自左舷时取“+”(右转)、来自右舷时取“-”(左转);
107、考虑侦察信号检测处理时间tcl、转向决策指示请示与下达的时间延迟tjc,以及下达转向命令到平台实际转向的操纵延迟tcz,因此平台实际转向时刻是在收到入射信号时刻ti后,延迟tcl、tjc、tcz才开始,即tzx=ti+tcl+tjc+tcz后平台才开始实际转向,在此之前平台依然直线运动;
108、所述确定新航迹坐标包括:
109、(1)转向阶段的坐标计算:
110、假如水下平台在转向过程中航速vt不变,其旋回半径为rx,转向角为δht,则总的旋转时间长度为:
111、
112、假设是旋转是匀速圆周运动,则旋回角速度ω为:
113、
114、假设开始转向的时刻为tzx,此时水下平台位置的坐标为[xt(tzx),yt(tzx)],则右转匀速圆周运动的圆心坐标(xx0,yx0)为:
115、
116、左转匀速圆周运动的圆心坐标(xx0,yx0)为:
117、
118、则在转向开始后的第i个旋回时刻ti=tzx+i·δt,当作顺时针(右转)匀速圆周运动时,其运动轨迹坐标为:
119、
120、当逆时针(左转)匀速圆周运动时,其运动轨迹坐标为:
121、
122、(2)转向结束直航阶段的坐标计算包括:
123、假设转向结束时刻水下平台的坐标为(xtj,ytj),按照规避航向htg匀速直航,则在仿真时刻ti=iδt,i=1,2,…,后续直航阶段的航迹坐标为:
124、
125、其中:
126、
127、本发明提供的一种模拟侦察和规避的水下目标回波信号全流程仿真方法,其有益效果如下:
128、1、提出了一种水下目标平台侦察与对抗规避功能的自主模拟仿真方法。水下目标(特别是潜艇)平台装备有侦察声纳,用于对敌方主动声纳或通信声纳信号的检测和分析,为进一步水声对抗提高信息支撑。一旦发现有主动声纳探测,会采取机动规避等措施,降低主动声纳对其的探测能力,更好地隐蔽自己。这是主动声纳对潜搜索使用时,水下目标平台采用的正常状态。当前由单台计算设备研制的主动声纳信号模拟器不具备这种模拟仿真功能,极大地影响了声纳信号仿真的真实性,也限制了主动声纳信号模拟器的应用范围。本发明专利,基于单一计算设备,为实现水下目标对抗规避功能提供了一套智能化解决方法,弥补了现有一体化声纳信号模拟器存在的严重不足。
129、2、提出了一种基于目标亮点结构和目标强度ts特性的目标反射信号仿真方法。目标回波信号仿真的关键是:目标回波信号的波形特性符合实际的目标形状结构,声纳接收到的回波信号强度除了符合海洋信道传播的衰减特性以外,很重要的是目标回波强度随信号入射方向的变化特性,即必须与符合目标强度曲线ts(θ)一致。对于计算速度要求极高的实时仿真模拟器,这既非常重要,又非常困难。为此,本发明专利提出了用目标的等效亮点结构参数控制回波信号波形结构、用目标强度ts曲线控制目标回波强度特性的方法,很好地模拟了目标回波的波形特性(亮点结构)、强度特性,而且计算简洁便利,非常适用于快速计算要求极高工程化应用背景。
130、3、提出了一套基于主动声纳信号“发射—发射段信道—目标—接收段信道—接收”全过程、体现水声传播特性和平台相对运动特性的目标回波信号全功能系统仿真模型。现有的主动声纳目标回波信号仿真大多是在单向水声信道仿真、多普勒特性仿真的基础上,考虑两倍的传播时延、和多普勒频移得到的,没有考虑主动声纳信号在往返传播过程中平台相对运动姿态变化、往返信道不同造成的接收信号误差,造成目标回波波形特性、多普勒特性,以及目标回波强度特性等模拟不准确。本发明专利提出的信道与多普勒分段模拟思路,目标反射波模拟是对经过发射信道传播和多普勒频移产生的信号进行仿真的,更加真实地还原了海上信号传播及其目标反射波产生的过程,使得目标回波仿真信号更加真实、准确、可信。
131、4、提出了一种适用于单一计算设备模拟器的侦察声纳信号检测与方位估计智能化模拟方法。无需知道侦察声纳的具体阵型、阵元数目及其信号处理方法,而是通过解算被动声纳方程,得到侦察信号的检测距离;进一步,通过侦察声纳的测向误差和动态仿真的侦察信号方位,估计侦察声纳给出的信号入射角(方位角),由此得到数据信息符合侦察声纳的性能指标,可以满足平台进行仿真规避决策的需要。
132、5、提出了一种适用于单一计算设备模拟器的水下平台规避决策的智能化模拟方法。根据水下平台不同入射角的目标强度(ts)分布特性,将平台反射强度划分成“高强度反射区”、“中强度反射区”和“弱强度反射区”,基于隐蔽安全性和转向快速性两个原则,提出了一种适用于自主模拟的平台规避决策方法。首先,基于侦察信号到达平台的入射方位(舷角)估计本平台反射强度的区域范围;进一步,根据入射角的大小和主动信号的左右舷方向,确定转向角的大小、以及左转弯、还是右转弯的方向。
- 还没有人留言评论。精彩留言会获得点赞!