基于摩擦伏特效应的传感装置的制作方法
1.本实用新型涉及传感器领域,尤其涉及一种基于摩擦伏特效应的传感装置,及其用于速度、位移、拉力和摆动角度的传感装置。
背景技术:
2.随着物联网的快速发展,系统集成化、智能化、小型化的需求加快了多功能传感器的研究,基于mems技术,现有的商业传感器获得了巨大的成功。尽管商用mems传感器性能优越,体积小,但通常功能单一,将一些实际上独立运行的单一功能传感器结合起来,是目前多功能传感器最常见的技术方法。另一方面,物联网也希望mems传感器可以连续工作很长时间,而频繁更换电池给物联网技术带来了不便。自供电技术的出现给新时代物联网技术提供新的技术路线,该技术可直接将待检测机械信息转换成电信号,即从工作环境而不是外部电源或传统电池中获取能量来驱动传感器。
3.通常,速度传感器能够高分辨率测量目标物体的运动方向和速度大小,具有广泛的应用,包括精密设备的组装、智能交通、安全监控,以及人机界面等。但实际上所报道的速度和位移传感器通常基于光、热或磁学传感机制,其中必须使用外部电源来驱动这些传感器。另外,摩擦纳米发电机(teng)可用作速度传感器,但它的输出是非连续的脉冲信号,只能检测初始速度,而不能检测速度的实时变化,因此也存在一定的局限性。
技术实现要素:
4.本实用新型的目的是提供一种可以根据摩擦伏特效应中速度变化产生输出性能变化的传感原理,实现精确的、连续的、实时的电信号输出,可用于自驱动的速度、位移、拉力和摆动角度等传感。
5.为了实现上述目的,本实用新型提供一种基于摩擦伏特效应的传感装置,其特征在于,包括:第一摩擦部和第二摩擦部,其中,
6.所述第一摩擦部包括层叠设置的第一电极层和摩擦层;第二摩擦部包括层叠设置的半导体层和第二电极层;第一摩擦部和第二摩擦部可以互相滑动摩擦,在第一电极层和第二电极层之间形成直流电流;所述直流电流与所述第一摩擦部和第二摩擦部之间的运动相关;
7.其中,能够互相接触的摩擦层和半导体层的材料为费米能级不同的材料。
8.优选的,还包括支架、弹簧和滑块,其中,所述滑块包括配重物,所述第一摩擦部设置在所述配重物上随所述配重物一起滑动;
9.所述支架用于连接所述弹簧的一端,所述弹簧的另一端与所述配重物连接,所述滑块在弹簧作用下可以回复原位。
10.优选的,所述滑块相对于所述第二摩擦部的滑动方向为水平方向或者竖直方向。
11.优选的,所述摩擦层的材料为绝缘体、导体和半导体材料,所述半导体层的材料为半导体材料。
12.优选的,所述摩擦层的材料为导电材料,所述摩擦层代替所述第一电极层材料。
13.优选的,所述摩擦层的材料为导电金属薄膜,所述半导体层的材料为半导体薄片。
14.相应的,本实用新型还提供一种速度传感装置,包括上述任一项所述的传感装置,将待传感的物体连接在第一摩擦部上,所述直流电流大小与所述第一摩擦部和第二摩擦部之间的滑动速度相关。
15.相应的,本实用新型还提供一种位移传感装置,包括上述任一项所述的传感装置,将需要测量位移的物体连接在第一摩擦部的滑块上,在物体位移了一段距离之后,断开所述物体与滑块的连接,此时由于弹簧弹力的作用滑块开始运动,从而产生电流信号的输出,所述电流信号大小与物体的位移大小相关。
16.相应的,本实用新型还提供一种拉力传感装置,包括上述任一项所述的传感装置,拉力作用在第一摩擦部或者滑块上,位移了一段距离之后,释放所述拉力,由于弹簧弹力的作用滑块开始运动,从而产生电流信号的输出,所述电流信号大小与所述拉力大小相关。
17.相应的,本实用新型还提供一种摆动角度传感装置,包括上述任一项所述的传感装置,还包括支架、连接件和滑块,其中,
18.所述滑块包括配重物,所述第一摩擦部设置在所述配重物上随所述配重物一起滑动;所述连接件一端固定在支架上,另一端与所述配重物连接形成单摆结构,所述第一摩擦部设置在滑块上,在振动作用下可以随着滑块在第二摩擦部表面摆动形成滑动摩擦;所述直流电流与所述摆动角度相关。
19.本实用新型的技术方案与现有技术相比,有下列优点:
20.本实用新型提供的基于摩擦伏特效应的传感装置可以根据摩擦伏特效应中速度变化产生输出电流变化的传感原理,实现精确的、连续的、实时的电信号输出,可用于自驱动的速度传感。在速度传感基础上还可以实现位移、拉力和摆动角度传感。本实用新型利用简单的器件结构实现了多种功能的实时高效传感。
附图说明
21.附图是用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本实用新型,但并不构成对本实用新型的限制。在附图中:
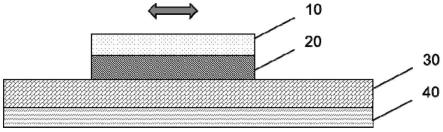
22.图1为本实用新型基于摩擦伏特效应的传感装置的典型结构示意图;
23.图2和图3为速度传感装置的结构示意图;
24.图4为速度传感装置速度与输出电流关系测试结果;
25.图5为位移传感装置位移与输出电流关系测试结果;
26.图6为拉力传感装置输出电流与拉力关系测试结果;
27.图7为本实用新型的摆动角度传感装置结构示意图;
28.图8为摆动角度传感装置振动与输出电流关系测试结果。
具体实施方式
29.以下结合附图对本实用新型的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本实用新型,并不用于限制本实用新型。
30.实施例一:
31.本实施例提供的是基于摩擦伏特效应的传感装置的一种典型结构,参见图1,包括:第一摩擦部和第二摩擦部,所述第一摩擦部包括层叠设置的第一电极层10和摩擦层20;第二摩擦部包括层叠设置的半导体层30和第二电极层40;第一摩擦部和第二摩擦部可以互相滑动摩擦,如图1中箭头所示,在第一电极层和第二电极层之间形成直流电流。其中,能够互相接触的摩擦层20和半导体层30的材料为费米能级不同的材料。该直流电流与第一摩擦部和第二摩擦部之间的运动相关,例如该直流电流的大小与第一摩擦部和第二摩擦部之间的相对滑动速度直接关联,直接检测两个电极之间的电流即可检测相对滑动速度。
32.本实施例的传感装置,除了可以对直线运动(包括水平运动和竖直运动)进行速度传感外,还可以对曲线运动如圆周运动进行传感。当第一摩擦部在第二摩擦部上进行圆弧形或者圆周滑动摩擦时,可以对圆周运动的线速度进行传感。
33.这里简单对本实施例的传感装置的工作原理进行描述。由于摩擦层20和半导体层30的材料为费米能级不同的材料,在相互接触时,会发生界面处的载流子重新分布,从而形成内置电场,相对滑动时,两个原子的电子云发生重叠并形成键时,能量量子会被释放,这激发了滑动界面上的电子-空穴对,由于内置电场,极性不同的表面载流子分别被驱动到摩擦层20和半导体层30,进而在外电路第一电极和第二电极之间产生直流的电信号输出。摩擦层20和半导体层30分别由具有不同费米能级的材料组成。实验表明绝缘体、导体和半导体材料均可以作为本实施例中的摩擦层材料。
34.常规的高分子聚合物都具有摩擦电特性,均可以作为制备本实用新型摩擦层20,例如,聚四氟乙烯、聚二甲基硅氧烷、聚酰亚胺、聚二苯基丙烷碳酸酯、聚对苯二甲酸乙二醇酯、苯胺甲醛树脂、聚甲醛、乙基纤维素、聚酰胺、三聚氰胺甲醛、聚乙二醇丁二酸酯等。非导电性氧化物、半导体氧化物和复杂氧化物也具有摩擦电特性,能够在摩擦过程形成表面电荷,因此也可以用来作为本实用新型的摩擦层,例如锰、铬、铁、铜的氧化物,还包括氧化硅、氧化锰、氧化铬、氧化铁、氧化铜、氧化锌、bio2和y2o3。常用的半导体层材料包括硅、锗;第ⅲ和第
ⅴ
族化合物,例如砷化镓、磷化镓等;第ⅱ和第ⅵ族化合物,例如硫化镉、硫化锌等;以及由
ⅲ‑ⅴ
族化合物和
ⅱ‑ⅵ
族化合物组成的固溶体,例如镓铝砷、镓砷磷等。除上述晶态半导体外,还有非晶态的玻璃半导体、有机半导体等。常用的导体材料可以为金属、导电有机物等,金属可以包括金、银、铂、铝、镍、铜、钛、铬或锡,以及由上述金属形成的合金,还包括二维层状材料石墨烯、mxene等。
35.当摩擦层20为导体材料时可以充当电极层的作用,与其接触设置的第一电极层10可以省去。即第一摩擦部仅包括摩擦层20。
36.下面以一个实际的传感装置具体描述本实施例中传感器的工作过程。进行试验的具体传感装置的器件结构参见图2和图3所示,基于摩擦伏特效应的传感装置,包括可以互相滑动的第一摩擦部和第二摩擦部,其中第一摩擦部可以仅包括摩擦层5,第二摩擦部包括半导体层4和第二电极层6(图2中未示出),其中,还包括支架1、弹簧2和滑块,支架1可以由有机玻璃亚克力等有一定强度的材料制成,将两块水平方向的亚克力和竖直方向的亚克力相互粘连,它们的连接角度被设置为90
°
,两块竖直的亚克力相互平行,在一个竖直的亚克力板内侧保证滑块(包括配重物3和摩擦层5)能够在中间稳定地上下滑动。弹簧2的一端被固定在顶部的水平方向的亚克力板上,下端连接着滑块。滑块由配重物3和摩擦层5组成,摩擦层5优选为导电金属薄膜,导电金属薄膜可以是铜、银、金等常见的金属导电材料,也可以
是石墨烯、mxene、导电布等其他的导电材料。半导体层4和第二电极层6贴附在竖直方向的亚克力内壁上,在滑块上下滑动时摩擦层5与半导体层4可以互相滑动摩擦,半导体层4可以采用半导体薄片,可选用半导体材料如硅片、碳化硅等其他的具有半导体性质的薄膜材料,贴上导电的第二电极后被用胶水粘贴在亚克力支架上,而且和导电金属薄膜紧密接触,并在边沿贴上刻度标尺,用于更方便读取位移,具体的放大图片如图3所示。
37.弹簧的设置是为了使第一摩擦部与第二摩擦部沿着相对滑动方向进行滑动,保证不会偏离方向,并且使滑块在弹簧作用下可以回复原位。该装置除了图2中所示的滑块竖直方向设置外,还可以水平方向设置,当水平方向设置时可以不设置支架、弹簧和配重物,只要能够保证第一摩擦部和第二摩擦部之间可以互相滑动摩擦即可。
38.摩擦层5还可以由与半导体薄片4类型相反的半导体薄片组成,这时需要在摩擦层5与配重物之间贴上第一电极层。配重块用于增加弹簧的弹性势能,增强传感器的灵敏度。
39.该装置可以用于速度传感器。当滑块相对于第二摩擦部滑动摩擦时,由于摩擦伏特效应,在摩擦层5与第二电极层6之间产生实时的直流电流,该直流电流与滑块的滑动速度直接相关。把运动的物体连接在滑块上,当物体拉动滑块,使得它和半导体薄片之间产生相对滑动,根据摩擦伏特效应,半导体和金属摩擦产生的电流输出与滑块相对滑动速度大小成正比,具体滑动速度与输出电流的关系如图4所示。因此先用固定的滑动速度测量传感装置产生的输出电流大小对该装置进行标定,然后就可以根据输出电流信号的大小,判断出滑块滑动速度的大小。
40.实施例二:
41.本实施例提供一种传感装置,用于位移传感,采用实施例一中的传感装置,将需要测量位移的物体连接在第一摩擦部的滑块上,然后在物体位移了一段距离之后,断开它与滑块的连接,此时由于弹簧弹力的作用,滑块开始运动,从而产生电流信号的输出。由于不同位移拉伸弹簧长度的不同,产生的弹簧拉力大小发生改变,因此滑块运动的速度大小随之改变,可以通过测量输出的电流大小来判断物体的位移大小,实验测出的位移和输出电流大小如图5所示。
42.本实施例中采用的传感装置可以是图1中的水平方向也可以是图2中的竖直方向设置。可以根据具体的工作环境进行灵活设置。
43.实施例三:
44.本实施例中提供了一种传感装置,用于拉力传感。采用实施例一中的传感装置,拉力作用在第一摩擦部或者滑块上,当选用的弹簧为固定的型号时,根据胡克定律,它的拉伸长度与拉力大小成正比。当释放拉力后,滑块开始运动,产生了一个和实施例二中用作位移传感相同的运动状态和效果,因而可以根据输出电流大小来测量拉力,实验测得的电流大小和换算成的拉力对应关系如图6所示。
45.实施例四:
46.本实施例中提供了一种传感装置,该装置可以用作摆动角度传感器。采用实施例一中的传感装置,将弹簧更换成绳子等连接件,该装置的滑块和绳子形成一个单摆的结构,环境的振动会驱动滑块产生摆动至不同的角度θ(如图7所示)摆动高度不一致因而在下落过程的势能不一样,而导致速度大小不同的运动,从而使得该传感装置产生不同的输出电流,因此我们可以根据输出的电流的大小判断环境振动幅度的大小,实验测试的不同摆动
幅度下的输出电流如图8所示。
47.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本实用新型对各种可能的组合方式不再另行说明。此外,本实用新型的各种不同的实施方式之间也可以进行任意组合,只要其不违背本实用新型的思想,其同样应当视为本实用新型所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1