一种基于无人机的LIBS探测系统的制作方法
一种基于无人机的libs探测系统
技术领域
1.本实用新型涉及激光诱导击穿光谱技术领域,特别涉及一种基于无人机的libs探测系统。
背景技术:
2.激光诱导击穿光谱技术(libs技术)由于具有操作简单、分析迅速、灵敏度高等优点而被广泛关注,并且广泛应用于污染监测、工业分析、空间探索、文物鉴定以及地质探测等不同领域。目前在部分应用场景中,使用现有的激光诱导击穿光谱技术探测系统进行探测时,只能进行远距离探测而无法近距离探测或者近距离探测难度大、成本高。当使用现有的激光诱导击穿光谱技术探测系统进行远距离探测时,光纤收集探头距离被测物体烧蚀位置较远,从而导致收光效果差。因此急需开发一种激光诱导击穿光谱技术探测系统,拓宽激光诱导击穿光谱技术探测系统的探测距离范围,拓展该探测系统的应用场景。
技术实现要素:
3.本实用新型为了解决现有的激光诱导击穿光谱技术探测系统在部分应用场景中无法进行近距离探测而导致收光效果差的问题,或者在部分应用场景中进行近距离探测难度大、成本高的问题,提供一种基于无人机的libs探测系统。
4.为了解决以上技术问题,本实用新型采用以下技术方案来实现:
5.一方面,本实用新型实施例提供一种基于无人机的libs探测系统,其包括:第一无人机、第二无人机、探测控制处理单元;
6.第一无人机载有激光器、摄像机,激光器用于发射激光至待测物体上,摄像机用于采集真实图像数据,并通过无线方式传给探测控制处理单元;
7.第二无人机载有光谱仪,光谱仪用于收集光谱数据,并通过无线方式传给探测控制处理单元;
8.探测控制处理单元用于控制激光器发射激光和光谱仪收集光谱数据,以及控制第一无人机和第二无人机飞行;
9.探测控制处理单元根据接收的光谱数据对待测物体进行定性及定量分析。
10.在一些实施例中,libs探测系统采用非共轴式光路。
11.在一些实施例中,第一无人机还载有可调节的第一平台,第二无人机还载有可调节的第二平台,激光器设置在第一平台上,光谱仪设置在第二平台上。
12.在一些实施例中,探测控制处理单元根据待测物体表面调节第一平台从而调节激光器发射激光的入射角度与待测物体表面垂直,并调节第二平台从而调节光谱仪收集光谱数据的角度。
13.在一些实施例中,libs探测系统还包括激光控制器、光谱仪控制器,激光控制器设置在第一无人机上并与激光器相连,光谱仪控制器设置在第二无人机上并与光谱仪相连。
14.在一些实施例中,激光控制器设有设置、q开关、闪光、待机、停止功能。
15.在一些实施例中,探测控制处理单元包括探测系统显示模块、数据信号交互模块、无人机控制模块、数据处理模块;
16.探测系统显示模块,用于显示无人机健康状况,飞行数据以及告警信息;
17.数据信号交互模块,用于发送或接收探测数据,探测数据包括飞行数据、图像数据、光谱数据;
18.无人机控制模块,用于控制第一无人机和第二无人机飞行;
19.数据处理模块,用于处理探测数据。
20.在一些实施例中,无人机控制模块包括命令控制子模块、飞行显示子模块;
21.飞行命令控制子模块,用于控制第一无人机和第二无人机飞行;
22.飞行显示子模块,用于显示无人机飞行信息,飞行信息包括无人机参数、轨道信息。
23.在一些实施例中,数据信号交互模块包括天线发射部件,天线接收部件;
24.天线发射部件,用于发送探测数据;
25.天线接收部件,用于接收探测数据。
26.在一些实施例中,libs探测系统使用ttl接口协议进行数据的交互。
27.与现有技术相比,本实用新型取得的技术效果包括:
28.1、本实用新型采用第一无人机搭载激光器可近距离接近待测物体发射激光对待测物体进行烧灼、电离激发形成等离子体,采用第二无人机搭载光谱仪,可近距离接近待测物体对等离子体产生的光谱数据进行收集,得到更优质的光谱数据。
29.2、本实用新型libs探测系统应用于对输电杆塔绝缘子表面污秽进行探测分析等高空作业的应用场景中,具有操作简单、成本低、安全性高的优势。
30.3、本实用新型采用非共轴式光路,因此可调节libs探测系统的收光角度,从而得到更优质的光谱数据。
31.4、光谱仪设置在可调节的第二平台上,因此在使用过程中可调节光谱仪收集光谱数据的角度,从而获得更优质的光谱数据。
附图说明
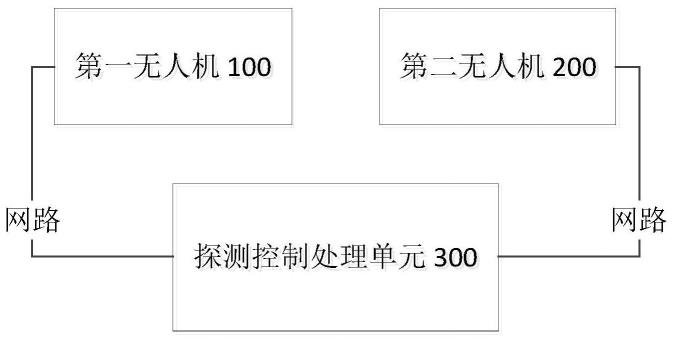
32.图1为本实用新型的基于无人机的libs探测系统示意图;
33.图2为本实用新型的第一无人机的结构框图;
34.图3为本实用新型的第二无人机的结构框图;
35.图4为本实用新型的探测控制处理单元的结构示意图。
具体实施方式
36.为了使本领域技术人员更好地理解本实用新型的方案,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的其他方案,都应当属于本实用新型的保护范围。
37.为了便于本领域人员理解本实用新型的实施例,以下对本实用新型涉及的技术术
语做出解释。
38.libs是laser-induced breakdown spectroscopy(激光诱导击穿光谱)的简称,其工作原理是利用脉冲激光产生的等离子体烧蚀并激发样品(通常为固体)中的物质,并通过光谱仪获取被等离子体激发的原子所发射的光谱,以此来识别样品中的元素组成成分,进而可以进行材料的识别、分类、定性以及定量分析。libs作为一种新的材料识别及定量分析技术,既可以用于实验室,也可以应用于工业现场的在线检测。
39.光谱仪又称分光仪,以光电倍增管等光探测器测量谱线不同波长位置强度的装置。它由一个入射狭缝,一个色散系统,一个成像系统和一个或多个出射狭缝组成。以色散元件将辐射源的电磁辐射分离出所需要的波长或波长区域,并在选定的波长上(或扫描某一波段)进行强度测定。
40.实施例1
41.如图1、图2和图3所示,本实用新型实施例提供一种基于无人机的libs探测系统,该libs探测系统包括:第一无人机100、第二无人机200、探测控制处理单元300;
42.第一无人机100载有激光器110、摄像机130,该激光器110用于发射激光至待测物体上即激光器110发射激光经过光学系统聚焦后对待测物体表面进行烧灼、电离激发形成等离子体,摄像机130用于采集真实图像数据,并通过无线方式传给探测控制处理单元300;
43.第二无人机200载有光谱仪210,光谱仪210用于收集光谱数据即光谱仪210对等离子体产生的光谱信号进行收集,并通过无线方式传给探测控制处理单元300;
44.探测控制处理单元300用于控制激光器110发射激光和光谱仪210收集光谱数据,以及控制第一无人机和第二无人机200飞行;
45.探测控制处理单元300控制激光器110和光谱仪210的延迟时间,根据接收的光谱数据对待测物体进行定性及定量分析。
46.本实用新型的libs探测系统优选地采用非共轴式光路,使得光谱仪210收集光谱数据不受到激光器110探测安全距离的限制,并且可调节收光角度,此时libs探测系统根据摄像机130采集的真实图像数据对待测物体表面烧蚀位置进行定位以及调整收光的距离与角度,得到最优的光谱信号。
47.本实施例采用第一无人机100搭载激光器110可近距离接近待测物体发射激光对待测物体进行烧灼、电离激发形成等离子体,采用第二无人机200搭载光谱仪210,可近距离接近待测物体对等离子体产生的光谱数据进行收集,得到更优质的光谱数据。当该libs探测系统应用于对输电杆塔绝缘子表面污秽进行探测分析等高空作业的应用场景中,具有操作简单、成本低、安全性高的优势。该libs探测系统采用非共轴式光路,因此可调节其收光角度,从而得到更优质的光谱数据。
48.实施例2
49.如图2和图3所示,本实施例在实施例1的基础上,第一无人机100还载有可调节的第一平台120,第二无人机200还载有可调节的第二平台220,激光器110设置在第一平台120上,光谱仪210设置在第二平台220上。当分析人员操作本实施例的基于无人机的libs探测系统对待测物体进行定性及定量分析时可根据摄像机130采集的有关待测物体形状和周围环境的真实图像数据进行分析,由此通过探测控制处理单元300调节第一平台120从而调节激光器110发射激光的入射角度,并调节第二平台220从而调节光谱仪210收集光谱数据的
角度以获得更优质的光谱数据。优选地探测控制处理单元300根据待测物体表面调节第一平台120从而调节激光器110发射激光的入射角度与待测物体表面垂直,并调节第二平台220从而调节光谱仪210收集光谱数据的角度,使收集的光谱数据质量最佳。
50.实施例3
51.如图2和图3所示,在上述实施例的基础上,本实施例的libs探测系统还包括激光控制器140、光谱仪控制器,激光控制器140设置在第一无人机100上并与激光器110相连,其通过无线方式与探测控制处理单元300相连,光谱仪控制器设置在第二无人机200上并与光谱仪210相连,其通过无线方式与探测控制处理单元300相连。此时探测控制处理单元300在控制激光器110和光谱仪210方面具有灵敏度高、抗干扰性强、时延低的优势。优选地设有设置、q开关、闪光、待机、停止功能的激光控制器140,使用该激光控制器140控制激光器110时具有操作简单、使用方便、安全性高的优势。该激光控制器140在不同的探测阶段启动相应的功能,工作效率更高、节约资源、操作安全性更高。
52.当分析人员使用本实施例的基于无人机的libs探测系统对待测物体进行定性及定量分析时,整个探测过程如下:首先,根据待测物体所处环境,合理选择激光器110的入射透镜焦距(1m、3m、5m等),保持第一无人机100、第二无人机200、第一平台120、第二平台220均匀与地平面平行;然后,控制第一无人机100飞至待测物体附近约5m处,根据待测物体表面方向调整激光器110入射角度与其垂直,启动激光控制器140闪光功能,与此同时观察第一无人机100搭载的摄像机130传回的图像中聚焦光斑的大小进行距离调整,当光斑为1mm左右时认为距离合适,接着控制第二无人机200接近待测物体,通过观察图像中聚焦光斑有无被遮挡来判断激光入射时是否会对第二无人机200造成损伤,然后关闭激光控制器140的闪光功能,启动待机功能,在保证第二无人机200安全的前提下尽量缩短收集光谱数据距离并调节到合适的收光角度,再然后关闭激光控制器140的待机功能,启动q开关功能,探测控制处理单元300严格按照设置好的时序以及烧灼次数发出控制指令进行激光探测及光谱收集,探测控制处理单元300将接收的光谱数据进行保存并进行定性、定量分析,最后启动激光控制器140的停止功能,将第一平台120、第二平台220调整为与水平面平行,依次将其收回。
53.实施例4
54.图4示出了本实用新型的探测控制处理单元的结构示意图。在上述实施例的基础上,本实施例的libs探测系统中探测控制处理单元300包括探测系统显示模块310、数据信号交互模块320、无人机控制模块330、数据处理模块340、图像分析模块350、摄像机控制模块360;
55.探测系统显示模块310,用于显示无人机健康状况,飞行数据以及告警信息;
56.数据信号交互模块320,用于发送或接收探测数据,所述探测数据包括飞行数据、图像数据、光谱数据,其中数据信号交互模块320包括用于发送探测数据的天线发射部件321,用于接收探测数据的天线接收部件322;此数据信号交互模块320使libs探测系统探测范围更广,抗干扰性更强。
57.无人机控制模块330,用于控制第一无人机100和第二无人机200飞行;优选地,无人机控制模块330包括飞行命令控制子模块331、飞行显示子模块332;
58.飞行命令控制子模块331,用于控制第一无人机100和第二无人机200飞行;
59.飞行显示子模块332,用于显示无人机飞行信息,飞行信息包括无人机参数、轨道信息;
60.数据处理模块340,用于处理探测数据;
61.图像分析模块350,用于分析和解析摄像机130采集的图像数据;
62.摄像机控制模块360,用于控制摄像机130采集图像数据。
63.本实施例的基于无人机的libs探测系统的探测控制处理单元300采用了模块化设计,具有低耦合高内聚的特点,各模块分工明确,功能布局合理,各个模块用于处理对应独立的探测数据,易于维护。
64.本实用新型的基于无人机的libs探测系统可采用rs485、rs232、can-bus、ttl等接口协议,优选地使用ttl接口协议进行数据的交互,具有传输速率高、带宽高、抗干扰性更强的优势。该libs探测系统可使用2.4ghz、900mhz、915mhz、433mhz等频率传输数据,优选地433mhz频率,具有距离远、穿透性强、绕射能力出众的优势。
65.上述实施例为本实用新型较佳的实施方式,但本实用新型的实施方式并不受上述实施例的限制,其他的任何未背离本实用新型的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1