一种三轴测力机构、上肢康复机器人的制作方法
1.本实用新型涉及上肢康复机器人技术领域,尤其涉及一种三轴测力机构、上肢康复机器人。
背景技术:
2.康复训练是康复医学的一个重要手段,主要是借助器械,采用适量的、定向或者有针对性的机体运动来帮助身体恢复到正常状态,使病人患肢恢复正常的自理功能,达到治疗效果。康复训练对于脑血栓术后用户、长期卧床用户、上下肢受伤手术后用户、偏瘫后遗症用户而言,可以最大程度帮助用户增强肌肉力量和灵活性,促进肢体血液循环,恢复上下肢的功能。
3.目前市面上的上肢康复机器人具有以下缺陷:
4.1.传统的用于恢复手肘或手臂的上肢康复机器人,大部分不具有竖直方向的测力能力,因此一般只能让用户在承载架上于水平面内进行摆臂运动,无法满足用户抬臂活动的测试。
5.2.设置有竖直方向测力传感器的上肢康复机器人,其竖直方向测力传感器一般设置于承载机构内部,直接承压状态下,此类力传感器难以测出细微的力变化,将导致最终测试结果不准,影响用户的康复等级判断。
6.3.传统的上肢康复机器人的康复疗程极为枯燥,容易使用户感到烦躁,并放弃恢复疗程。
技术实现要素:
7.为解决上述问题,本实用新型提供了一种三轴测力机构、上肢康复机器人及控制方法,本实用新型是这样实现的:
8.一种三轴测力机构,设置于上肢康复机器人的壳体的内部,与承载康复机构的传力杆相连,包括:
9.设置于所述上肢康复机器人的底板上的z轴测力机构,所述z轴测力机构的上端设置x-y复合测力机构;
10.所述z轴测力机构包括固接于所述底板边缘处的z轴支撑架,所述z 轴支撑架的上端表面设置z轴测力杆,所述z轴测力杆朝向远离所述z轴支撑架的方向水平延伸,所述z轴测力杆内设置z轴力传感器;
11.所述x-y复合测力机构包括固设于所述z轴测力杆远离所述z轴支撑架的一端的上方的传力平台,所述传力平台的左侧或右侧固设x轴测力杆,所述x轴测力杆内设置x轴力传感器,所述传力平台的前侧或后侧固接y 轴测力杆,所述y轴测力杆内设置y轴力传感器,所述传力平台的上端表面沿左右方向设置一对x轴导向轨,所述x轴导向轨上活动设置有x轴传力板,所述x轴传力板靠近所述x轴测力杆的一侧设置有x轴传力部,所述x轴传力部包覆于所述x轴测力杆的外部,所述x轴传力板的上表面沿前后方向设置y轴导向轨,所述y轴导
向轨上活动设置有y轴传力板,所述y轴传力板靠近所述y轴测力杆一侧设置y轴传力部,所述y轴传力部包覆于所述y轴测力杆的外部,所述传力杆可拆卸插接于所述y轴传力板的上端表面;
12.其中,所述传力杆位于所述底板的中心的正上方,所述z轴测力杆至少部分露出所述传力平台,所述z轴测力杆长10~20cm,所述z轴支撑架与所述底板的中心位置处的间距为15~25cm。
13.作为进一步改进的,还包括限位筒,所述限位筒贯穿所述x轴传力板以及所述y轴传力板并固接于所述传力平台的上端表面,所述传力杆套设于所述限位筒内,且所述传力杆的上端伸出所述限位筒并承载所述康复机构;
14.所述限位筒具体包括设置于所述康复机构下方的圆柱状的筒部,所述筒部的下端设置十字部,所述十字部的四个内角处向下延伸形成四个支脚部,所述支脚部的下端固接于所述传力平台的上表面上;
15.所述x轴传力板具体包括设置于所述传力平台的上表面上方的第一面板,所述第一面板的中部开设供所述限位筒穿过的避让孔,所述第一面板的前后两侧向上向外翻折形成导向部,所述导向部的下端设置与所述x轴导向轨适配的x轴滑块,所述x轴传力部呈倒u型设置于所述第一面板靠近所述x轴测力杆的一侧;
16.所述y轴传力板具体包括设置于所述第一面板上方的第二面板,所述第二面板的下端表面设置与所述y轴导向轨适配的y轴滑块,所述第二面板的中部开设通孔,所述通孔的中部通过两对两两垂直的支撑杆设置有安装台,所述传力杆的下端插接于所述安装台上,所述支撑杆与所述安装台将所述通孔分隔为四个与所述支脚部相应的开孔,所述第二传力部呈倒l 型设置于所述第二面板靠近所述y轴测力杆的一侧。
17.作为进一步改进的,所述传力平台包括矩形状的承载部,所述承载部的前侧或后侧部分向左延伸形成延伸部,所述承载部的左侧或右侧远离所述承载部的一端部分向上翻折形成x轴传感器安装部,所述延伸部远离所述x轴传感器安装部的一侧向上翻折形成y轴传感器安装部,所述x轴测力杆固接于所述x轴传感器安装部上,且所述x轴传力部包覆于所述x轴测力杆远离所述x轴传感器安装部的一端,所述y轴测力杆固接于所述y 轴传感器安装部上,且所述y轴传力部包覆于所述y轴测力杆远离所述y 轴传感器安装部的一端。
18.作为进一步改进的,所述x轴力传感器设置于所述x轴测力杆内远离所述x轴传力部的一端,所述y轴力传感器设置于所述y轴测力杆内远离所述y轴传力部的一端,所述z轴力传感器设置于所述z轴测力杆内靠近所述z轴支撑架的一端。
19.优选的,定义所述承载部的长为l,宽为d,所述延伸部的延伸长度为 l,宽为d,则有d+l=l,且所述传力杆的轴线对应于所述传力平台上远离所述x轴传感器安装部2/3l及1/2d位置处;
20.所述z轴测力杆的轴线对应于所述传力平台上远离所述x轴传感器安装部2/3l处。
21.优选的,所述承载部长l为15~20cm,所述承载部的宽度d为10~15cm,所述延伸部的延伸长度l为5~10cm,所述延伸部的宽度d为2~3cm。
22.本实用新型还提供了一种上肢康复机器人,包括如上所述任意一种三轴测力机构。
23.本实用新型的有益效果在于:
24.通过设置z轴支撑架,并在z轴支撑架的上端表面设置z轴测力杆,z 轴测力杆朝向远离z轴支撑架的方向水平延伸,x-y复合测力机构设置于z 轴测力杆远离z轴支撑架的一端,且z轴测力杆至少部分露出传力平台,z 轴测力杆长10~20cm,z轴支撑架与底板的中心位置处的间距为15~25cm,实现了通过z轴测力杆将竖直方向上的力转换为与z轴支撑架连接处的力矩,放大了微小的力变化,使力测试更为精确。
附图说明
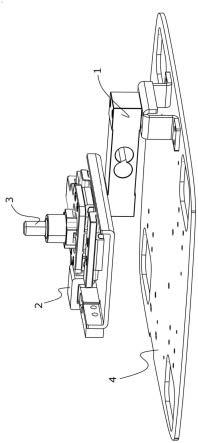
25.图1为本实用新型整体结构示意图。
26.图2为本实用新型爆炸结构示意图。
27.图3为上肢康复机器人外观示意图。
28.图4为本实用新型传力平台整体结构示意图。
29.图5为本实用新型x轴传力板整体结构示意图。
30.图6为本实用新型y轴传力板整体结构示意图。
31.图7为本实用新型传力杆及限位筒整体结构示意图。
32.图8为本实用新型的模块结构示意图。
33.图9为本实用新型的控制方法逻辑流程图。
具体实施方式
34.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。因此,以下对在附图中提供的本实用新型的实施方式的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施方式。
35.在本实用新型的描述中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。
36.一种三轴测力机构,设置于上肢康复机器人的壳体6的内部,与承载康复机构7的传力杆3相连,包括:
37.设置于所述上肢康复机器人的底板4上的z轴测力机构1,所述z轴测力机构1的上端设置x-y复合测力机构2;
38.所述z轴测力机构1包括固接于所述底板4边缘处的z轴支撑架11,所述z轴支撑架11的上端表面设置z轴测力杆12,所述z轴测力杆12朝向远离所述z轴支撑架11的方向水平延伸,所述z轴测力杆12内设置z 轴力传感器;
39.所述x-y复合测力机构2包括固设于所述z轴测力杆12远离所述z轴支撑架11的一端的上方的传力平台21,所述传力平台21的左侧或右侧固设x轴测力杆24,所述x轴测力杆24内设置x轴力传感器,所述传力平台 21的前侧或后侧固接y轴测力杆25,所述y轴测力杆25内设置y轴力传感器,所述传力平台21的上端表面沿左右方向设置一对x轴导向轨213,所
述x轴导向轨213上活动设置有x轴传力板22,所述x轴传力板22靠近所述x轴测力杆24的一侧设置有x轴传力部223,所述x轴传力部223包覆于所述x轴测力杆24的外部,所述x轴传力板22的上表面沿前后方向设置y轴导向轨224,所述y轴导向轨224上活动设置有y轴传力板23,所述y轴传力板23靠近所述y轴测力杆25一侧设置y轴传力部232,所述 y轴传力部232包覆于所述y轴测力杆25的外部,所述传力杆3可拆卸插接于所述y轴传力板23的上端表面;
40.其中,所述传力杆3位于所述底板4的中心的正上方,所述z轴测力杆12至少部分露出所述传力平台21,所述z轴测力杆12长10~20cm,所述z轴支撑架11与所述底板4的中心位置处的间距为15~25cm。
41.作为进一步改进的,还包括限位筒5,所述限位筒5贯穿所述x轴传力板22以及所述y轴传力板23并固接于所述传力平台21的上端表面,所述传力杆3套设于所述限位筒5内,且所述传力杆3的上端伸出所述限位筒5 并承载所述康复机构7;
42.所述限位筒5具体包括设置于所述康复机构7下方的圆柱状的筒部51,所述筒部51的下端设置十字部52,所述十字部52的四个内角处向下延伸形成四个支脚部,所述支脚部的下端固接于所述传力平台21的上表面上;
43.所述x轴传力板22具体包括设置于所述传力平台21的上表面上方的第一面板221,所述第一面板221的中部开设供所述限位筒5穿过的避让孔,所述第一面板221的前后两侧向上向外翻折形成导向部222,所述导向部 222的下端设置与所述x轴导向轨213适配的x轴滑块225,所述x轴传力部223呈倒u型设置于所述第一面板221靠近所述x轴测力杆24的一侧;
44.所述y轴传力板23具体包括设置于所述第一面板221上方的第二面板 231,所述第二面板231的下端表面设置与所述y轴导向轨224适配的y轴滑块235,所述第二面板231的中部开设通孔,所述通孔的中部通过两对两两垂直的支撑杆233设置有安装台234,所述传力杆3的下端插接于所述安装台234上,所述支撑杆233与所述安装台234将所述通孔分隔为四个与所述支脚部相应的开孔,所述第二传力部呈倒l型设置于所述第二面板231 靠近所述y轴测力杆25的一侧。
45.作为进一步改进的,所述传力平台21包括矩形状的承载部211,所述承载部211的前侧或后侧部分向左延伸形成延伸部212,所述承载部211的左侧或右侧远离所述承载部211的一端部分向上翻折形成x轴传感器安装部214,所述延伸部212远离所述x轴传感器安装部214的一侧向上翻折形成y轴传感器安装部215,所述x轴测力杆24固接于所述x轴传感器安装部214上,且所述x轴传力部223包覆于所述x轴测力杆24远离所述x轴传感器安装部214的一端,所述y轴测力杆25固接于所述y轴传感器安装部215上,且所述y轴传力部232包覆于所述y轴测力杆25远离所述y轴传感器安装部215的一端。
46.作为进一步改进的,所述x轴测力杆24包括固接于所述x轴传感器支架上的弹性杆,所述弹性杆内设置应变片,所述弹性杆远离所述x轴传感器支架且远离所述传力平台21的一侧开设螺纹孔,所述y轴测力杆25以及所述z轴测力杆12与所述x轴测力杆24结构相同。所述x轴传力部223 远离所述第一面板221的一端开设与所述x轴测力杆24的螺纹孔相应的第一u型槽,第一传力螺栓贯穿所述第一u型槽并螺接于螺纹孔内。所述y 轴传力部232远离所述第二面板231的一端开设与所述y轴测力杆25的螺纹孔相应的第二u型槽,所述第二传力螺栓贯穿所述第二u型槽并螺接于螺纹孔内。所述第一传力螺栓以及第二传力螺栓的螺
杆直径小于所述u型槽的槽宽,所述第一传力螺栓以及第二传力螺栓的螺母直径大于所述u型槽的槽宽。
47.为提高用户体验,因此需在x方向上做出了一定的让位补偿,因此作为进一步改进的,所述x轴传力部223包覆于所述x轴测力杆24的外周且间距0.5~2mm,所述y轴传力部232包覆并贴靠于所述y轴测力杆25的外周。
48.作为进一步改进的,所述x轴力传感器设置于所述x轴测力杆24内远离所述x轴传力部223的一端,所述y轴力传感器设置于所述y轴测力杆 25内远离所述y轴传力部232的一端,所述y轴力传感器设置于所述z轴测力杆12内靠近所述z轴支撑架11的一端。具体的,所述x轴力传感器、 y轴力传感器以及y轴力传感器内部的应变片设置于靠近固定端的一侧,保证了力臂的延长,使得x、y以及z三个方向上的测力更为精准。
49.优选的,定义所述承载部211的长为l,宽为d,所述延伸部212的延伸长度为l,宽为d,则有d+l=l,且所述传力杆3的轴线对应于所述传力平台21上远离所述x轴传感器安装部2142/3l及1/2d位置处;所述z轴测力杆12的轴线对应于所述传力平台21上远离所述x轴传感器安装部 2142/3l处。由于在传力平台21上不对称的设置有x轴测力杆24以及y轴测力杆25,则传力平台21及其承载的机构整体的重心并未在所述承载部 211的几何中心位置处,此种方式安装可以保证其设置于所述z轴测力杆 12上时不会产生过大偏转或偏移,安装更为稳固,且保证整体的测力精确度。
50.优选的,所述承载部211长l为15~20cm,所述承载部211的宽度d为 10~15cm,所述延伸部212的延伸长度l为5~10cm,所述延伸部212的宽度 d为2~3cm。
51.本实用新型还提供了一种上肢康复机器人系统,包括上肢康复机器人,所述上肢康复机器人内设置如上所述任意一种三轴测力机构,还包括:
52.数据处理模块,分别与所述x轴力传感器、y轴力传感器以及所述z轴力传感器通信连接,所述数据处理模块用于收集所述x轴力传感器、y轴力传感器以及所述z轴力传感器所采集的力信号fx、fy以及fz并发送至所述控制模块,所述控制模块还与所述移动机构通信连接;
53.显示设备,所述控制模块将所述力信号转发至所述显示设备并于所述显示设备的屏幕上显示x、y以及z方向的力的大小;
54.存储模块,所述存储模块内存储有小游戏,所述小游戏包括飞行小游戏以及跑酷小游戏,所述控制模块根据用户选择的小游戏类型发送同的控制信号至所述显示设备上,所述显示设备根据所述控制信号显示相应的游戏界面,所述小游戏根据康复等级进行难度分级。
55.本实用新型进一步提供了一种上肢康复机器人的控制方法,应用于如上所述的一种上肢康复机器人系统,包括以下步骤:
56.s1.获取所述上肢康复机器人的位置并以光点形式显示在显示设备的上,以所述上肢康复机器人的初始位置为原点(0,0,0)建立立体坐标系界面,定义从所述原点出发且与所述x轴导向轨213平行的方向为x轴,从所述原点出发且与所述y轴导向轨224平行的方向为y轴,从所述原点出发且与所述传力杆3平行的方向为z轴;
57.s2.根据用户选择的所述小游戏类型于所述显示设备上发出指令并通知用户,所述数据处理模块获取所述x轴力传感器、y轴力传感器以及所述 z轴力传感器所感应的力信
号fx、fy以及fz并发送至所述控制模块,所述控制模块获取所述力信号后将所述力信号转发至所述显示设备并于所述显示设备的屏幕上显示x、y以及z方向的力的大小,所述移动机构根据所述力信号fx以及fy带动所述上肢康复机器人于工作平面内移动;
58.s3.多次重复步骤s2;
59.s4.存储小游戏过程中的指令完成度数据,完成康复训练。
60.作为进一步改进的,所述指令包括平移指令以及上提指令,所述步骤 s2具体包括:
61.s201.根据用户选择的所述小游戏类型在所述显示设备上显示操作目标,所述操作目标的坐标为(xi,yi,zi),初始状态下i=0,同时所述显示设备上显示游戏指令,记录初始力信号fz0;
62.s202.所述操作目标的坐标根据所述力信号fx、fy以及fz进行以相应的速率进行变化。
63.作为进一步改进的,当用户选择飞行小游戏时,所述操作目标为始终朝向y轴正方向前进的飞行器,需按照所述游戏指令操作所述操作目标完成左右平移、前后减速或者向上爬升等动作;
64.具体的,所述飞行器以恒定速率v0向y轴正方向移动,当fx向左为正时,所述飞行器于所述显示设备上呈现向左平移的状态,且所述移动机构带动所述上肢康复机器人向左平移,fx向右为正时则相反。当fy向前为正时,飞行器的飞行速率加快,且加速度与fy大小呈正比,当fy向后为正时则相反。当fz<fz0时,飞行器于所述显示设备上呈现向上抬升的状态。所述显示设备上随机出现左右平移预设距离、加减速达到预定值以及向上爬升预设高度的指令,每个持续10s,在持续时间内完成指令则计分,未完成则不计分。
65.当用户选择跑酷小游戏时,所述操作目标为始终朝向y轴正方向跑动的跑酷运动员,需按照所述游戏指令要求操作所述操作目标躲避障碍完成跑酷,且预设起跳力变化阈值δfz。
66.具体的,跑酷路段从左至右设置至少三条赛道,所述跑酷运动员以恒定速率v1向y轴正方向移动,路段上会随机出现i级高、ii级高、上下皆封闭仅有中部可供通过的孔型障碍以及上方封闭仅有下部可通过的杠型障碍,每一类障碍至少占据一条赛道。当fx向左为正时,所述跑酷运动员于所述显示设备上呈现向左移一条赛道的动画,且所述移动机构带动所述上肢康复机器人向左平移绕开障碍物,fx向右为正时则相反。当fy向前为正时,跑酷运动员呈现向前扑出的动画,以穿过所述孔型障碍,当fy向后为正时,跑酷运动员呈现滑铲动画,通过所述杠型障碍。当fz-fz0≥δfz时,跑酷运动员呈现起跳动画越过i级高障碍。运动员通过一个障碍后计分,未能通过障碍则游戏结束。
67.以上所述仅为本实用新型的优选实施方式而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1