一种挠度检测水准系统的制作方法
1.本实用新型属于挠度检测技术领域,具体涉及一种挠度检测水准系统。
背景技术:
2.挠度是指物体弯曲变形时其横截面形心沿垂直方向的线位移,也指物体受到荷载作用下的最大变形量。传统的挠度检测方法通常是通过百分表或位移计进行直接测量,此类方法通常成本低廉、设备简易。
3.但是,传统方法由于需要在各个测点搭设架子、钢丝或仪表等装置,因此,在待测目标下方存在深水、峡谷或铁路等场合下,各类检测仪器无法顺利搭设,导致常规检测手段难以正常实施,即使使用远程检测仪器进行测量,当深水水域或峡谷面积过大时,在待测目标周边找出布置水准仪、全站仪等远程装置的适宜位置也颇为困难。因此,针对此类检测难题,需要一种新的技术方案加以改善。
技术实现要素:
4.针对上述现有技术中的不足,本实用新型提供了一种挠度检测水准系统,用以确保挠度检测工作可在各类困难场合下顺利作业,有效提高挠度检测作业的适应性及实用价值。
5.本实用新型通过以下技术方案实施:一种挠度检测水准系统,包括底座、多个轮体、储箱、头座、尾座、安装架、伺服电机、计量尺、电子水平仪、计算模块。其中,所述底座通过多个对称设置的所述轮体支撑,所述储箱设于底座中段部位之上,所述头座与所述尾座质量相等,两者对称设于底座两端,所述安装架固定于储箱中段部位之上,安装架上设有铰座,所述铰座上套合设有铰轴,所述伺服电机机身固定于铰座上,并以其输出轴连接于所述铰轴;所述计量尺为竖向布置的平板,其下端固定连接于铰轴上,其上端固定装有所述电子水平仪,计量尺上朝向尾座的一面设有竖向布置的刻度线;所述计算模块设于底座或安装架之上,底座、多个轮体、储箱、头座、尾座、安装架、伺服电机、计量尺、电子水平仪、计算模块共同组成一套移动检测系统。
6.进一步的,本实用新型还包括升降台、激光云台,所述升降台设于所述移动检测系统一旁,所述激光云台放置于升降台的平台上,并以其激光输出方向朝向所述计量尺上设有所述刻度线的一面。
7.进一步的,所述底座、所述储箱、所述头座与所述尾座所组成整体的重心与所述计量尺所处的竖直面重合。
8.进一步的,所述计算模块分别与所述伺服电机、所述电子水平仪之间设有电气连接并形成反馈控制系统,所述反馈控制系统的控制信号由计算模块提供给伺服电机,同时其反馈信号由电子水平仪提供给计算模块。
9.进一步的,所述尾座上朝向所述计量尺的一面上设有观察窗。
10.进一步的,所述电子水平仪的水平基准面与所述计量尺上设有所述刻度线的一面
垂直。
11.进一步的,所述储箱内装有铅块组成的载荷介质,同时其侧壁设有开合门。
12.进一步的,所述升降台的升降驱动机构由伺服电缸与平台构成。
13.进一步的,所述激光云台输出激光束的角度调节机构由关节轴与伺服装置构成。
14.本实用新型的有益效果是:当储箱装有载荷介质的移动检测系统行驶至待测目标中段时,其对目标造成的载荷位移令垂直布置的计量尺同步下移,从而令一旁水平设置的激光云台所提供的基准激光束在计量尺上的聚焦点发生改变,测量人员通过尾座观察窗可及时读测聚焦点所处刻度线数据变化,并通过计量尺与移动检测系统重心的重合布置进一步确保测量精度,以此迅速测算出准确的待测目标挠度参数,整体装置的测量作业无需布置搭架、钢丝等辅助工具,也无需在周边设置远程测量站点,同时不受地域环境限制,待测目标下方深水、峡谷及铁路公路等环境均可正常作业,整体装置的布置、测量及收尾操作快捷高效,有效提高了挠度检测作业在各类环境下的适应性,适合多方面扰度位移变形测量,具有较佳的实用价值。
附图说明
15.图1是本实用新型一实施例提供的移动检测系统的轴测图;
16.图2是本实用新型一实施例提供的移动检测系统的内部结构正视图;
17.图3是本实用新型一实施例的挠度检测水准系统的初始状态示意图;
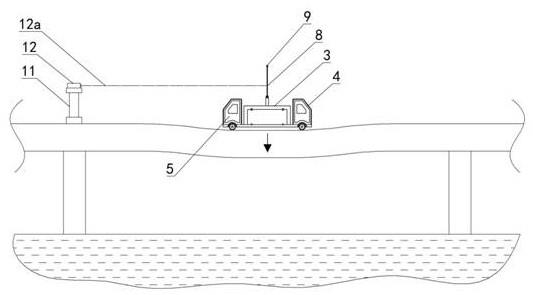
18.图4是本实用新型一实施例的挠度检测水准系统的作业状态示意图;
19.图5是本实用新型一实施例的挠度检测水准系统的逻辑控制模块图。
20.图中:1-底座,2-轮体,3-储箱,3a-开合门,4-头座,5-尾座,5a-观察窗,6-安装架,6a-铰座,6b-铰轴,7-伺服电机,8-计量尺,8a-刻度线,9-电子水平仪,10-计算模块,11-升降台,12-激光云台,12a-激光束。
具体实施方式
21.下面结合说明书附图及实施例对本实用新型作进一步的详细描述。
22.如图1-图3所示,本实用新型的一实施例提供的挠度检测水准系统,包括底座1、多个轮体2、储箱3、头座4、尾座5、安装架6、伺服电机7、计量尺8、电子水平仪9、计算模块10、升降台11、激光云台12。
23.底座1通过多个对称设置的轮体2支撑,储箱3设于底座1之上的中段部位,储箱3内装有铅块组成的载荷介质。
24.储箱3的侧壁设有开合门3a,头座4与尾座5质量相等,两者对称设于底座1两端,安装架6固定于储箱3之上的中段部位,安装架6上设有铰座6a,铰座6a上套合设有铰轴6b,伺服电机7的机身固定于铰座6a上,伺服电机7的输出轴连接于铰轴6b。
25.计量尺8为竖向布置的平板,其下端固定连接于铰轴6b上,其上端固定装有电子水平仪9,底座1、储箱3、头座4与尾座5所组成整体的重心与计量尺8所处的竖直面重合,尾座5上朝向计量尺8的一面上设有观察窗5a,同时计量尺8上朝向尾座5的一面设有竖向布置的刻度线8a,电子水平仪9的水平基准面与计量尺8上设有刻度线8a的一面垂直;计算模块10设于安装架6之上,计算模块10分别与伺服电机7、电子水平仪9电气连接并形成反馈控制系
统,反馈控制系统的控制信号由计算模块10提供给伺服电机7,同时其反馈信号由电子水平仪9提供给计算模块10。
26.底座1、多个轮体2、储箱3、头座4、尾座5、安装架6、伺服电机7、计量尺8、电子水平仪9与计算模块10共同组成一套移动检测系统。
27.升降台11设于移动检测系统一旁,激光云台12放置于升降台11上表面,并以其激光输出方向朝向计量尺8,使激光束12a聚焦点位于刻度线8a上,升降台11的升降驱动机构由伺服电缸与平台构成,激光云台12输出激光束12a的角度调节机构由关节轴与伺服装置构成。
28.如图3所示,在初始状态下,确保装有适量铅块载荷介质的储箱3载体设于靠近升降台11处,先通过激光云台12的伺服装置精确控制激光云台12自身关节的转动角度,从而确保激光云台12输出激光束12a的水平度,而后驱动升降台11的伺服电缸以控制其升降平台面与激光云台12的水平高度,令激光云台12输出的水平激光束12a在初始状态下的聚焦点位于所述刻度线8a的零刻度上,完成初步调校工作。而后令观察员进入尾座5内,操作员进入头座4内,而后驱动轮体2令移动检测系统在待测目标上方朝右行驶(方向依图3),如图4所示,在驶入预先标记的目标中部区域后,调整行驶位置并确保移动检测系统对准待测目标上的中部标记,同时通过电子水平仪9检测计量尺8上端面的水平度,当计量尺8的角度姿态存在垂直方向上的偏差时,电子水平仪9亦出现水平偏差,同时将偏差数据信号反馈至计算模块10,计算模块10转换成相应的数据控制信号并传递至伺服电机7,使伺服电机7的输出轴与铰轴6b偏移至适宜角度并将其所连接的计量尺8校正至垂直姿态(逻辑控制如图5所示),利用伺服电机7的高精度性以及反馈控制系统在行驶过程中的同步调校以确保计量尺8时刻处于垂直状态,因此尾座5的观察员可通过观察窗5a随时读测竖直刻度线8a上激光聚焦位置的高度数据,当移动检测系统十分接近待测目标中心时,铅块载荷介质与移动检测系统对目标施压所造成的变形程度亦达到最大值,并利用计量尺8与移动检测系统重心的重合设置以确保测量基准面与最大载荷位置重合,以此进一步确保测量精度,在移动检测系统整体下沉至极限位置后,激光束12a聚焦点随着计量尺8下降而在刻度线8a上所上升的位置也达到最大值,观察员实时记录最大刻度读数,得出标准载荷下的待测目标挠度数值。完成挠度读测工作后,操作员驱动移动检测系统驶离目标区域,同时运走升降台11与激光云台12,确保迅速撤离以便后续工作,最后通过开启开合门3a以释放储箱3内的载荷介质(或可直接进入下一目标继续检测),实现布置、测量与收尾工序的高效运作,由于作业过程不受周边地域环境限制,当待测目标下方存在深水水域、峡谷或铁路公路等障碍物时,本实施例可依照同理在待测目标上方顺利实施挠度检测作业,以此确保本实用新型在各类困难场合下的适应性。
29.以上所述实施方式,仅为本实用新型的优选实施例,并非对本实用新型作出形式上的限制,针对本领域内的普通技术人员而言,在不脱离权利要求书所限定的特征范围下,本实用新型还可作出其他形式的修改、变更与等同替换,这些都应属于本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1