一种水听器立体阵列的制作方法
1.本实用新型涉及水听器排布技术领域,具体涉及一种水听器立体阵列。
背景技术:
2.作为信号处理领域里的一个重要分支,阵列信号处理近几十年来发展非常迅猛,并被广泛应用到雷达、声纳、通信、地震勘测、射电天文、医学诊断以及成像等多种军事应用和国民经济领域。阵列信号处理指的是把一组水听器安放于空间不同的位置来构成水听器阵列,且用该阵列来对空间目标信号进行接收,并对接收到的信号进行处理。通过处理阵列的接收信号来提高感兴趣信号的增益,抑制噪声和无用的干扰或不感兴趣的信息,以及提取所需信号以及信号特征信息(参数)是阵列信号处理的主要目的。通常来说应用场合决定了水听器阵列的形式和信号处理的目的。阵列信号处理在雷达和声纳探测领域具有广泛的应用,阵列信号的组成很大程度上取决于水听器阵列的排布。然而水听器阵列排布往往受到现实条件的禁锢,比如布放空间。其次水听器阵列不同的排布方式有着不同的作用,目前均匀排列的阵型和平面阵列信号处理研究已日趋成熟和完善。
3.均匀线阵线阵结构简单,但是实际上波束扫描大约覆盖120
°
;平面矩形阵可以看作均匀线阵扩展阵型,波束随着扫描角偏离法线方向的角度变大而变宽,以及阵元间的互耦效应难于保持平衡。均匀圆阵在方位角方向上可以提供360
°
的覆盖范围,还在各个方向上具有相同的测向性能,并且能提供俯仰角信息。此外,它还可通过对阵列激励进行循环移动,可实现对方位角方向上的波束简单灵活的操纵。均匀圆阵的阵列结构对称特性还使得它基本上能够保持互耦的平衡。球形阵列、圆柱阵也具有360
°
方位角覆盖的特性,还能提供无模糊的180
°
俯仰角覆盖,并且球形阵列能在全空域保持方向图不变,但是这三种种阵型对布放空间要求较高。随着水下机器人的飞速发展,水下机器人与阵列相配合也成为热点研究。二者结合,一方面要考虑布放位置和阵列孔径以达到最好的阵列信号处理效果,另一方面也要考虑水下机器人在水下运行时的阻力。由此可见传统常用的阵型(圆柱阵除外)在与水下机器人的配合应用中具有较大的局限性。而圆柱阵的制作工艺相对复杂,支架制作难度大,原型布放对位置要求页较高。
技术实现要素:
4.针对上述问题,发明人提供了一种布放简单、支架制作简单的水听器立体阵列。
5.具体地,本实用新型是这样实现的:
6.一种水听器立体阵列,包括立体支架,所述支架由四个侧面构成,每个侧面上均设有多个相同的子阵列,所述子阵列之间的距离相等,每个所述子阵列均由多个非均匀排列的水听器组成。
7.进一步地,所述立体支架的长和宽均为水下机器人中部的最大维度;
8.进一步地,每个子阵列中,第一个和第二个水听器的间距为d,第三个和第四个、第四个和第五个水听器的间距为2d,第五个和第六个水听器的间距为4d。
9.进一步地,每个侧面上均设有三个子阵列,每个子阵列均由八个非均匀排列的水听器组成。
10.进一步地,所述立体支架的长和宽均为水下支撑柱的最大维度;
11.每个子阵列中,第一个和第二个水听器的间距为d,第三个和第四个、第四个和第五个水听器的间距为2d,第五个和第六个、第六个和第七个水听器的间距为4d,第七个和第八个水听器的间距为8d。
12.相比现有技术,本实用新型的工作原理及有益效果:
13.(1)本技术提供的水听器立体阵列,由四个面阵两两相连组成,可接收全向信号,相比较传统阵型,接收范围更广。
14.(2)不均匀的水听器排列结构,克服了现有均匀阵只能接收一个频段的缺点。
15.(3)采用立体支架,相较于现有的圆柱阵,布放操作更加方便,而且支架制作也相对简单。
16.(4)不均匀面阵可单独使用。应用于水下支撑柱一类的场景可以操作仅使用一面或者两面以延长不均匀立体阵的使用年限。
附图说明
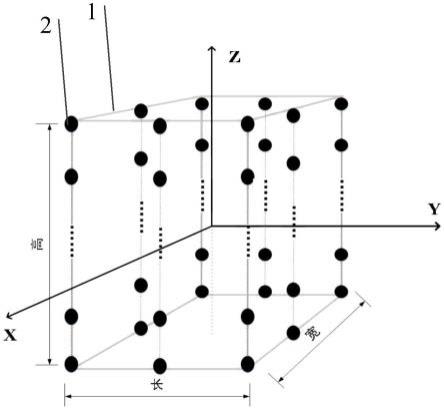
17.图1为实施例1中的水听器立体阵列的结构示意图;
18.图2为实施例2中的子阵列排列模型示意图;
19.图3为实施例2中的水听器立体阵列的阵型仿真示意图;
20.图4为实施例2中的水听器立体阵列的2d指向性图;
21.图5为实施例2中的水听器立体阵列的3d指向性图;
22.图6为实施例3中的水听器立体阵列的阵型仿真示意图;
23.图7为实施例3中的水听器立体阵列的2d指向性图;
24.图8为实施例3中的水听器立体阵列的3d指向性图。
具体实施方式
25.下面通过具体实施方式结合附图对本实用新型作进一步详细说明。
26.实施例1
27.如图1所示,本实用新型提供了一种水听器立体阵列,包括由四个侧面构成的立体支架1,立体支架1的长和宽均为水下机器人中部的最大维度。每个侧面上均设有多个相同的子阵列(优选为三个),子阵列之间的距离相等,每个子阵列均由多个非均匀排列的水听器2组成,以实现了对不同频段信号的接收。
28.实施例2
29.设水下机器人中部的最大维度为0.6m,预测接收信号的最大频率f=15khz,声速c=1500m/s,水听器使用全向水听器。子阵列的阵元间距d(水听器间距)根据接收信号的频率f决定,d=c/2f=0.2m。
30.如图3所示,以间距0.2m排列3个水听器,紧接着以间距0.4m排列2个水听器,再以间距0.8m排列1个水听器,此时获得不均匀排列子阵列。3条不均匀子阵列组成面阵,4个面阵两两相连组成不均匀水听器立体阵列。不均匀水听器立体阵列的仿真图如图3所示,其
中*表示水听器位置,该水听器立体阵列的2d指向性如图4所示,3d指向性图如图5所示。
31.由如图4-5可知,本技术的立体阵列的指向性相对一般阵列更全面,因此可接收全向信号,相比较传统阵型,接收范围广,测向测距效果好。接收信号的最大频率为15khz,同样可接收小于15khz信号,因此在接收信号频带更宽的情况下水下机器人可以探测到更多的目标。
32.实施例3
33.设水下支撑柱的最大维度为1.8m,预测接收信号的最大频率f=1250hz,声速c=1500m/s,水听器使用全向水听器。子阵列的阵元间距d(水听器间距)根据接收信号的频率f决定,d=c/2f=0.2m。
34.以间距0.6m排列3个水听器,紧接着以间距1.2m排列2个水听器,以间距2.4m排列2个水听器,以间距4.8m排列1个水听器,此时获得不均匀排列子阵列。3条不均匀子阵列组成面阵,4个面阵两两相连组成不均匀水听器立体阵列。不均匀水听器立体阵列的仿真图如图6所示,其中*表示水听器位置,该水听器立体阵列的2d指向性如图7所示,3d指向性图如图8所示。
35.由如图7-8可知,本技术的立体阵列的指向性相对一般阵列更全面,因此可接收全向信号,相比较传统阵型,接收范围更广,测向测距效果更好。与水下机器人相比,水下支撑柱需要接收信号的频带更宽,因此可以在此基础上继续按照本发明的阵列排布方式进行多阵元的组合。
36.以上应用了具体个例对本实用新型进行阐述,只是用于帮助理解本实用新型,并不用以限制本实用新型。对于本实用新型所属技术领域的技术人员,依据本实用新型的思想,还可以做出若干简单推演、变形或替换。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1