一种将水平运动转化为异地垂直运动的节流机构的制作方法
1.本实用新型涉及实验空气动力学技术领域,尤其涉及一种将水平运动转化为异地垂直运动的节流机构。
背景技术:
2.高超声速飞行器因其速度优势和全球可达等特点而备受国际广泛关注,进气道作为飞行器推进系统的核心气动部件之一,承担着对自由来流进行减速增压,提供稳定的气流供给燃烧室燃烧的功能。进气道的气动性能不仅影响着推进系统的工作效率和工作稳定性,还对飞行器的气动力特性有着显著影响。进气道气动性能的优劣通常需要通过风洞试验进行考核,其中自起动性能作为进气道的关键气动性能之一,是进气道风洞试验重点考核的性能指标。
3.开展进气道自起动考核实验的关键是在有效的试验时间内对进气道进行节流控制,首先给进气道施加反压迫使进气道不起动,然后撤销反压考察进气道能否恢复起动,以此获得进气道的自起动性能。因此,节流机构的设计是自起动试验的关键。
4.节流结构是常规风洞试验中进气道节流控制的常用技术手段。到目前为止,节流机构主要有以下两种结构方案,一是将节流锥的直线运动转化为当地动力机构的直线运动,二是将节流锥的直线运动转化为异地动力机构的平行直线运动。
5.现有的用于进气道节流控制的节流结构方案,存在以下不足之处:
6.①
将节流锥的直线运动转化为当地动力机构直线运动的节流方案:当动力机构位于节流锥下游的主流中,节流锥装置的长度就会造成进气道模型整体长度过长而增加当地的堵塞度,同时动力机构的电机会直接受到当地高温高速气流的冲击而失效或损坏,对动力机构进行包罩保护势必进一步导致当地堵塞度超标;当动力机构位于节流锥下游的主流外,垂直固定在动力机构滑块上的用于带动节流锥实现水平方向进退平动的单支臂的长度难以把握,长度过短造成动力机构无限靠近主流区从而使当地堵塞度增大,长度过长会使动力机构的滑块承受较大的扭矩造成动力机构卡死或电机丢步从而影响进气道节流控制的准确性。
7.②
将节流锥的直线运动转化为异地动力机构平行直线运动的节流方案,通过连杆滑槽机构将节流锥的直线运动转化为异地平行直线运动,成功地解决了动力机构位于节流锥下游情况下出现的堵塞超标及电机失效问题,但是异地动力机构的水平直线运动容易受到动力机构当地水平方向空间位置的限制,在动力机构的当地水平方向空间位置受限时,不仅出现结构机构的安装困难,还易造成节流锥无法达到进气道出口下游预期的节流位置,无法对进气道进行有效的节流控制。
技术实现要素:
8.本实用新型意在提供一种将水平运动转化为异地垂直运动的节流机构,解决了在当地水平方向空间位置受限时,现有的节流机构无法安装的问题和节流锥无法达到进气道
出口下游预期节流位置的问题。
9.为了达到上述目的,本实用新型的技术方案如下:
10.一种将水平运动转化为异地垂直运动的节流机构,其特征在于:包括直线电机、固定座、直角三角形摇臂、节流锥支杆、同轴限位轴套和节流锥,所述直线电机轴的末端通过销轴一与所述直角三角形摇臂的锐角处滑动连接,所述直角三角形摇臂的直角顶点通过销轴二与所述固定座转动连接,所述直角三角形摇臂的另一锐角处通过销轴三与所述节流锥支杆的一端滑动连接,所述节流锥支杆的另一端穿设于所述同轴限位轴套后与所述节流锥连接。
11.进一步的,所述直线电机和所述固定座均固定设置在模型底座上。
12.进一步的,所述同轴限位轴套包括限位轴套一和限位轴套二,所述限位轴套一和所述限位轴套二同轴水平固定设置在模型底座上。
13.进一步的,所述直线电机的电机轴线与所述同轴限位轴套的中心轴线垂直且位于同一竖直平面内。
14.相比现有技术,本方案的有益效果:
15.本方案采用直角三角形摇臂及滑槽机构将节流锥的水平运动转化为垂直于节流方向的异地直线上的平动,在动力机构的当地水平方向空间位置狭窄的情况下,节流装置不受动力机构当地水平空间位置狭窄的影响,节流锥可以达到进气道出口下游预期的节流位置,实现对进气道进行有效的节流控制。同时,本方案为常规中开展进气道自起动性能试验研究的节流机构设计提供了又一种有效的技术途径,是常规风洞中进气道试验的节流机构设计方案的有益补充。
附图说明
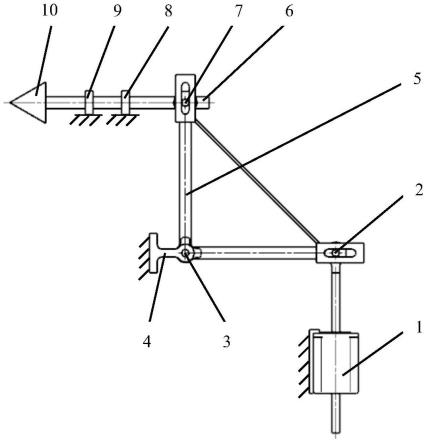
16.图1是本实用新型一种将水平运动转化为异地垂直运动的节流机构的结构示意图;
17.图2是本实用新型工作工程中进锥的结构示意图;
18.图3是本实用新型工作工程中退锥的结构示意图。
具体实施方式
19.下面通过附图和具体实施方式对本实用新型作进一步的详细说明:
20.说明书附图中的附图标记包括:直线电机1、销轴一2、销轴二3、固定座4、直角三角形摇臂5、节流锥支杆6、销轴三7、限位轴套一8、限位轴套二9、节流锥10。
21.实施例
22.如附图1所示:一种将水平运动转化为异地垂直运动的节流机构,包括直线电机1、固定座4、直角三角形摇臂5、节流锥支杆6、同轴限位轴套和节流锥10,直线电机1轴的末端通过销轴一2与直角三角形摇臂5的锐角处滑动连接,直角三角形摇臂5的直角顶点通过销轴二3与固定座4转动连接,直角三角形摇臂5的另一锐角处通过销轴三7与节流锥支杆6的一端滑动连接,节流锥支杆6的另一端穿设于所述同轴限位轴套后与所述节流锥10连接。
23.直线电机1和固定座4均固定设置在模型底座上。
24.同轴限位轴套一8和限位轴套二9,限位轴套一8和限位轴套二9同轴水平固定设置
在模型底座上。
25.直线电机1的电机轴线与同轴限位轴套的中心轴线垂直且位于同一竖直平面内。
26.具体的,
27.直线电机1的电机轴末端通过销轴一2连接在直角三角形摇臂5靠近直线电机1的锐角顶点的滑槽中,直角三角形摇臂5的直角顶点通过销轴二3连接在固定座4上形成固定铰链,节流锥支杆6远离节流锥底部的一端通过销轴三7连接在直角三角形摇臂5另一锐角顶点的滑槽中,节流锥支杆6的另一端穿过限位轴套一8及限位轴套二9后,与节流锥10连接。
28.直线电机1、固定座4、限位轴套一8、限位轴套二9均固定在模型底座上,在试验过程中,进气道试验模型无论是变换攻角或侧滑角,都不会对进气道试验模型的节流控制带来影响。
29.直线电机1的电机轴线与进气道隔离段内通道中心轴线垂直且位于同一竖直平面内,限位轴套一8、限位轴套二9同轴且中心轴线与节流锥10的中心轴线和进气道试验模型隔离段内通道中心轴线共线。
30.本方案的工作过程:
31.如附图2所示,当直线电机1的电机轴直线上升时,销轴一2在直角三角形摇臂5靠近直线电机1电机轴的锐角顶点滑槽中滑动,使直角三角形摇臂5以销轴二3为中心逆时针转动,牵引销轴三7在直角三角形摇臂5另一锐角顶点的滑槽中滑动,推动节流锥支杆6在限位轴套一8、限位轴套二9的限制下向进气道隔离段出口端运动,节流锥10只能向进气道隔离段出口方向直线平动进锥。
32.如附图3所示,当直线电机1的电机轴直线下降时,销轴一2在直角三角形摇臂5靠近直线电机1电机轴的锐角顶点滑槽中滑动,使直角三角形摇臂5以销轴二3为中心逆时针转动,牵引销轴三7在直角三角形摇臂5另一锐角顶点的滑槽中滑动,推动节流锥支杆6在限位轴套一8、限位轴套二9的限制下向远离进气道隔离段出口端运动,节流锥10只能向远离进气道隔离段出口方向直线平动退锥。
33.在直线电机1当地水平空间位置狭窄的情况下,采用本节流机构对进气道进行节流控制,节流锥10不受直线电机1当地水平空间位置狭窄的限制和影响,能够达到进气道出口下游预期的节流位置,实现对进气道准确的节流控制。
34.节流锥的锥位变化与直线电机的电机轴伸缩距离的关系:
35.假设:
36.①
直角三角形摇臂5靠近直线电机1的锐角顶点所在的直角边处于图1所示的水平方向时,节流锥10的位置为零位;
37.②
节流锥10处于零位时,直角三角形摇臂5的水平直角边长度为a,单位:mm;
38.③
节流锥10处于零位时,直角三角形摇臂5的竖直直角边长度为b,单位:mm;
39.④
节流锥10的锥位变化为δl,单位:mm,δl》0表示节流锥10向进气道隔离段出口端平移的距离即进锥量,δl《0表示节流锥10远离进气道隔离段出口端平移的距离即退锥量;
40.⑤
直线电机1的电机轴垂直升降的距离为δd,单位:mm,δd》0表示直线电机1的电机轴上升的距离,δd《0表示直线电机1的电机轴下降的距离。
41.直线电机1的电机轴的升降距离δd与节流锥10的锥位变化δl,可以通过公式(1)得到:
[0042][0043]
根据进气道节流控制的需要确定节流锥10的锥位变化量δl后,可以按照公式(1)计算出直线电机1的电机轴的升降距离δd,根据δd对直线电机1进行精确控制,从而达到准确控制节流锥10的平移量,实现对进气道常规风洞试验进行有效的节流。
[0044]
以上所述的仅是本实用新型的实施例,方案中公知的具体结构和/或特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本实用新型的前提下,还可以作出若干变形和改进,这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1