一种导航定位定向装置的制作方法
1.本实用新型属于导航定位定向领域,具体涉及一种导航定位定向装置。
背景技术:
2.本部分的陈述仅仅是提供了与本公开相关的背景技术,并不必然构成现有技术。
3.北斗导航系统是我国拥有自主知识产权的卫星导航系统,具有较强的信号覆盖能力和较高的定位精度,为智能化发展提供了重要的技术支撑,rtk定位是基于载波相位观测量的实时动态技术。目前,大多数的模块不能满足在复杂环境下对算力的要求,在定位定向方面精度不高,稳定性差;不能满足市面上导航定位终端对模块体积的需求;而且在车载、船载、智能装备等导航终端产品中基于rtk-gps技术实现,该组合定位方法其不能同时支持bds/gps/glonass/galileo/qzss五系统的定位;对于导航定向目前常用的是基于惯性定向系统,其通过内部的惯性器件获取当前的角速度等信息,但是惯性定向存在随着导航的持续,其惯性定向系统会因为温度变化、震动引起误差。
技术实现要素:
4.本实用新型为了解决上述问题,提出了一种导航定位定向装置,是一种集惯性导航与组合导航的定位定向装置。
5.根据一些实施例,本实用新型采用如下技术方案:
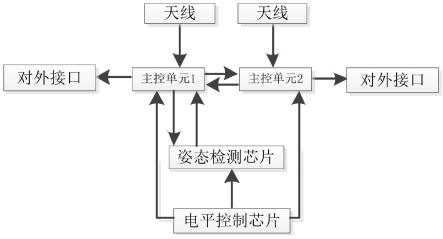
6.一种导航定位定向装置,包括:第一主控单元,第二主控单元和姿态检测单元,所述第一主控单元分别与第二主控单元、姿态检测单元电连接;
7.所述姿态检测单元将采集的姿态数据传输给第一主控单元;
8.第一主控单元接收卫星定位数据以及姿态检测单元所传输的姿态数据,输出定位信息,并将定位信息传输给第二主控单元;
9.所述第二主控单元接收卫星定位数据,根据自身所接收的卫星定位数据以及第一主控单元的定位信息输出定向信息。
10.另外,根据本实用新型实施例的还可以具有以下附加技术特征:
11.优选的,还包括电平控制单元,所述电平控制单元为姿态检测单元、第一主控单元、第二主控单元进行供电。
12.优选的,所述第一主控单元和第二主控单元分别连接天线,通过天线接收卫星定位数据。
13.优选的,所述电平控制单元、第一主控单元、第二主控单元以及姿态检测单元均集成在pcb上。
14.优选的,还包括屏蔽罩,所述屏蔽罩焊接在pcb上,保护该导航定位定向装置的内部结构。
15.优选的,所述第一主控单元与第二主控单元通过ttl1通讯协议进行数据的传输。
16.优选的,所述第一主控单元集成有bds定位数据接收单元、gps定位数据接收单元、
glonass定位数据接收单元、galileo定位数据接收单元、qzss定位数据接收单元和姿态数据接收单元。
17.优选的,所述第二主控单元集成有bds定位数据接收单元、gps定位数据接收单元、glonass定位数据接收单元、galileo定位数据接收单元、qzss定位数据接收单元。
18.优选的,所述姿态检测单元采集加速度和角速度数据发送至第一主控单元。
19.优选的,所述第一主控单元和第二主控单元分别通过无线传输方式与客户端进行数据传输。
20.与现有技术相比,本实用新型的有益效果为:
21.本实用新型所提供的一种导航定位定向装置,硬件小封装、低功耗,为车载、船载、智能装备等导航产品提供高精度的定位定向,且能够满足导航定位定向终端对模块设计的要求。
22.本实用新型所提供的一种导航定位定向装置,采用双天线和双主控单元的设计,能够支持rtk技术、组合导航技术、定位定向技术,能够输出高精度的定位定向信息。
附图说明
23.构成本实用新型的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
24.图1是本实用新型中导航定位定向装置示意图;
25.图2是本实用新型中第一主控单元的u16a的引脚图;
26.图3是本实用新型中第一主控单元的u16b的引脚图;
27.图4是本实用新型中第一主控单元的u16c的引脚图;
28.图5是本实用新型中第二主控单元的u1a的引脚图;
29.图6是本实用新型中第二主控单元的u1b的引脚图;
30.图7是本实用新型中第二主控单元的u1c的引脚图;
31.图8是本实用新型中电平控制单元的电路原理图;
32.图9是本实用新型中姿态检测单元的电路原理图;
33.图10是本实用新型中导航定位定向装置的整体示意图;
34.图11是本实用新型中导航定位定向装置的结构示意图。
35.附图标记说明:
36.1、pcb板,2、屏蔽罩,3、邮票孔,4、第一主控单元,5、第二主控单元,6、姿态检测单元,7、电平控制单元
具体实施方式:
37.下面结合附图与实施例对本实用新型作进一步说明。
38.应该指出,以下详细说明都是例示性的,旨在对本实用新型提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本实用新型所属技术领域的普通技术人员通常理解的相同含义。
39.实施例一
40.如图1所示,本实用新型提供一种导航定位定向装置,包括:第一主控单元,第二主控单元和姿态检测单元,所述第一主控单元分别与第二主控单元、姿态检测单元电连接;所述姿态检测单元将采集的姿态数据传输给第一主控单元;第一主控单元接收卫星定位数据以及姿态检测单元所传输的姿态数据,输出定位信息,并将定位信息传输给第二主控单元;所述第二主控单元接收卫星定位数据,根据自身所接收的卫星定位数据以及第一主控单元的定位信息输出定向信息。
41.还包括电平控制单元,所述电平控制单元为姿态检测单元、第一主控单元、第二主控单元进行供电。
42.所述第一主控单元和第二主控单元分别连接一根天线,通过天线接收卫星定位数据。
43.本实用新型采用双天线的双主控单元,其中第一主控单元所连接的天线为主天线,第二主控单元所可连接的天线为从天线,主天线和从天线都能接收bds/gps/glonass/galileo/qzss的定位数据。
44.在第二主控单元的对外接口连接有对外串口时,第一主控单元输出定位信息,第二主控单元输出航向信息以及相对于第一主控单元的定位信息。
45.具体的,第一主控单元通过主天线接收卫星定位数据以及机械车辆的姿态数据,并接收外部基站的差分数据,利用rtk差分技术,第一主控单元将观测的定位数据、差分数据以及姿态数据进行数据的融合,通过第一主控单元的对外串口输出定位信息。此外,第一主控单元还将观测的卫星定位数据、姿态数据、外部基站接收的差分数据传输给第二主控单元。
46.第二主控单元根据所接收的第一主控单元的卫星定位数据、姿态数据以及自身接收的卫星定位数据,将主从天线看作为两个点,两点确定一条直线,确定主从天线的位置矢量,进而确定主从天线与真北方向的夹角,从而计算得到机械车辆的航向信息;此外,由于导航定位定向装置是安装在车辆或船上等,导航定位定向装置是移动的,第二主控单元基于所接收的第一主控单元的卫星定位数据、外部基站的差分数据通过计算移动的rtk差分数据,基于移动的rtk差分数据和第二主控单元自身接收的卫星定位数据计算得到相对于第一主控单元的定位信息,第二主控单元通过对外串口将航向信息和相对于第一主控单元的信息输出。
47.在第二主控单元对外接口没有连接对外串口时,第一主控单元输出定位定向信息。
48.具体的,第二主控单元根据所接收的第一主控单元的卫星定位数据、姿态数据以及自身接收的卫星定位数据,确定主从天线的位置矢量,进而确定主从天线与真北方向的夹角,从而计算得到机械车辆的航向信息,并将航向信息传输给第一主控单元;由于第二主控单元的定位信息是基于第一主控单元的定位信息所做的移动差分数据,所以默认基于外部基站的差分数据所得的定位数据更为准确,因此,第二主单元只向第一主控单元传输航向信息;第一主控单元通过主天线接收卫星定位数据以及机械车辆的姿态数据,并接收外部基站的差分数据,利用rtk差分技术,第一主控单元将观测的定位数据、外部基站接收的差分数据、姿态数据以及第二主控单元所传输的航向信息进行数据的融合,通过对外串口输出定位定向信息。
49.在具体的实施例中,如图2-4所示,第一主控单元采用型号为ag3335a芯片,ag3335a芯片包括三部分即u16a、u16b、u16c,ag3335a芯片支持bds、gps、glonass、galileo和qzss,支持rtk技术、组合导航技术以及定位定向技术。
50.如图5-7所示,第二主控单元采用型号为ag3335a芯片,ag3335a芯片包括三部分即u1a、u1b、u1c,ag3335a芯片支持bds、gps、glonass、galileo和qzss,支持rtk技术、组合导航技术以及定位定向技术。
51.如图8所示,为本实施例的电平控制单元,电平控制单元由电平控制芯片和外围电路构成,电平控制芯片采用型号为rt5707wsc,电平控制单元外接3.3v电压,将3.3v电压转换为1.8v电压,为第一主控蒂娜元、第二主控单元、姿态检测单元提供工作电压。
52.如图9所示,姿态检测单元采用姿态检测芯片,具体的采用bmi160传感器,bmi160为六轴传感器,可获取三轴陀螺仪和三轴加速度计原始观测值,bmi160将获取的姿态数据传输给第一主控单元。
53.在另一实施例中,公开了本实用新型中导航定位定向装置的产品结构,如图10-11所示,电平控制单元7分别与第二主控单元5、第一主控单元4、姿态检测单元6电性连接,姿态检测单元6与第一主控单元4电性连接,第一主控单元4与第二主控单元5电性连接;第一主控单元4、第二主控单元5、姿态检测单元6以及电平控制单元7均集成在pcb板1上,在pcb板1左右边缘侧分别设置有多个邮票孔3,多个邮票孔3分别对应不同的对外接口(其中包括天线接口),第一主控单元4设置在pcb板1的的左侧位置,第二主控单元5设置在第一主控单元4的右侧,姿态检测单元6设置在第一主控单元4的下方位置,电平控制单元7设置在第二主控单元5的下方位置。还包括屏蔽罩2,屏蔽罩2通过多个焊盘焊接在pcb板1上,采用标准封装格式。屏蔽罩2设置在第一主控单元4、第二主控单元5、姿态检测单元6和电平控制单元7的外围,邮票孔3设置在屏蔽罩1的外侧。通过上述在pcb板上集成的方式,有效减小了模块体积的尺寸,尺寸是22mm
×
17mm
×
3mm,满足导航定位定向终端产品设计时对模块体积的需求。
54.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
55.上述虽然结合附图对本实用新型的具体实施方式进行了描述,但并非对本实用新型保护范围的限制,所属领域技术人员应该明白,在本实用新型的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本实用新型的保护范围以内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1