姿态监测模块和电动滑板车
1.涉及姿态监测领域,具体涉及电动滑板车姿态监测。
背景技术:
2.传统的电动滑板车是一种娱乐用具,主要为青少年用于娱乐活动。传统电动滑板车包括单排轮结构以及比排轮结构,所谓单排轮结构其轮系与自行车相似,不能依靠其自身的结构保持平衡,必须依赖使用者的操作;与之不同,双排轮结构的电动滑板车其轮系通常为平衡式设计,例如设置有四组或者三组滑轮。
3.如今,出现了电动滑板车,电动滑板车在用途上已经摆脱了传统电动滑板车的限制,由娱乐用品转变成了便捷出行的交通工作,受到年轻群体的追捧。电动滑板车灵活便捷,一般使用人行道,而人行道上交通工具较少,行人的警惕性不高,容易造成危险。
4.现有技术中,电动滑板车的使用中一个重要问题是爬坡,由于电动滑板车本身并非为爬坡设计的,但是在实际使用中又不能完全避免爬坡,导致爬坡时动力明显不足。动力不足的问题只能通过硬件本身解决。但是,现有电动滑板车能够提供较大动力之后,出现的新问题的是动力无法自动与输出需要匹配。
5.专利号为cn202111283725.2的专利文件公开了一种智能电动滑板车坡道检测控制方法,提到了基于摄像头的坡道辅助系统,但该系统需要多个摄像头进行坡道检测,需要的成本较高,而且,使用单目摄像头不能很好的处理景深数据、摄像头还会受到光线的影响,同时因为是外置的摄像头,磕碰和淋雨等情况也容易损坏或导致摄像头失灵;因此其坡道检测能力较差。
技术实现要素:
6.针对现有技术中没有一种稳定可靠的电动车坡道辅助系统,本实用新型提供了姿态检测模块和搭载姿态检测模块的电动滑板车,采用姿态检测模块实现电动滑板车坡道检测的功能,具体的:
7.姿态监测模块,用于电动滑板车,所述的模块包括:惯性传感器和主控单元,所述的主控单元电连接所述的惯性传感器,用于采集所述的惯性传感器的实时数据,所述惯性传感器用于检测电动滑板车的姿态。
8.进一步,所述的惯性传感器为gy25系列传感器。
9.进一步,所述的主控单元采用单片机控制电路实现。
10.进一步,所述的模块还包括:磁强计,所述的主控单元电连接所述的磁强计,用于采集所述的磁强计的实时数据。
11.基于同一发明构思,本实用新型还提供了电动滑板车,包括滑板,所述的电动滑板车还包括所述的姿态检测模块;所述的惯性传感器固定在所述的滑板的重心位置。
12.进一步,所述的电动滑板车还包括:指示灯,所述的指示灯的信号输入端连接所述的主控单元的信号输出端、固定在所述的电动滑板车的侧壁上。
13.进一步,所述的电动滑板车还包括:蜂鸣器,所述的蜂鸣器的信号输入端连接所述的主控单元的信号输出端、固定在所述的电动滑板车的底面上。
14.基于同一发明构思,本实用新型还提供了电动滑板车,包括滑板、电机驱动系统、一组驱动轮和一组从动轮,所述电机驱动系统固定在所述滑板底部临近驱动轮附近,用于驱动所述驱动轮转动,所述的电动滑板车还包括所述的姿态检测模块,所述的惯性传感器固定在所述的滑板的重心位置,所述的磁强计固定在所述的滑板底部距离电机驱动系统较远的一端。
15.进一步,所述的电动滑板车还包括:指示灯,所述的指示灯的信号输入端连接所述的主控单元的信号输出端、固定在所述的电动滑板车的侧壁上。
16.进一步,所述的电动滑板车还包括:蜂鸣器,所述的蜂鸣器的信号输入端连接所述的主控单元的信号输出端、固定在所述的电动滑板车的底面上。
17.本实用新型的有益之处在于:
18.本实用新型提供的姿态检测模块,弥补了现有技术中电动滑板车无法实现自身位姿监测的空缺,并且相比较与采用摄像头实现坡道监测的技术方案,本实用新型提供的姿态检测模块没有监测死角,且不受光线和振动的干扰、制造和维护成本低、运行更稳定,因为采用内置模块,不易破损,可靠性较高。
19.并且在惯性传感器的基础上增加了强磁计,采用强磁计和惯性传感器共同完成姿态监测的工作,强化监测能力,使系统数据更加可靠。
20.本实用新型提供的两个电动滑板车,提供了坡道辅助型电动滑板车,实现坡道辅助的功能,弥补了现有技术中没有具备坡道辅助功能的电动滑板车的空缺;
21.其中一个电动滑板车采用惯性传感器加测加速夹角的方式,能够不受光线和振动的干扰,以更低的制造和维护成本的方式实现更稳定可靠的姿态监测功能,用以驱动电机,实现坡道辅助的功能;同时,基于惯性传感器,还能够实现碰撞或摔倒报警功能,在监测到电动滑板车突然发生较大的加速度时,即可触发警报功能。
22.另一个电动滑板车采用惯性传感器和强磁计通过现有技术相配合,保留了不受光线和振动的干扰,以更低的制造和维护成本的方式实现更稳定可靠的姿态监测功能,且基于采集的位姿和惯性加速度的数据,更精准的检测电动滑板车的实时状态,实现更加灵敏的坡道辅助和碰撞报警、摔倒报警的功能。
23.适用于电动滑板车的设计和应用中。
附图说明
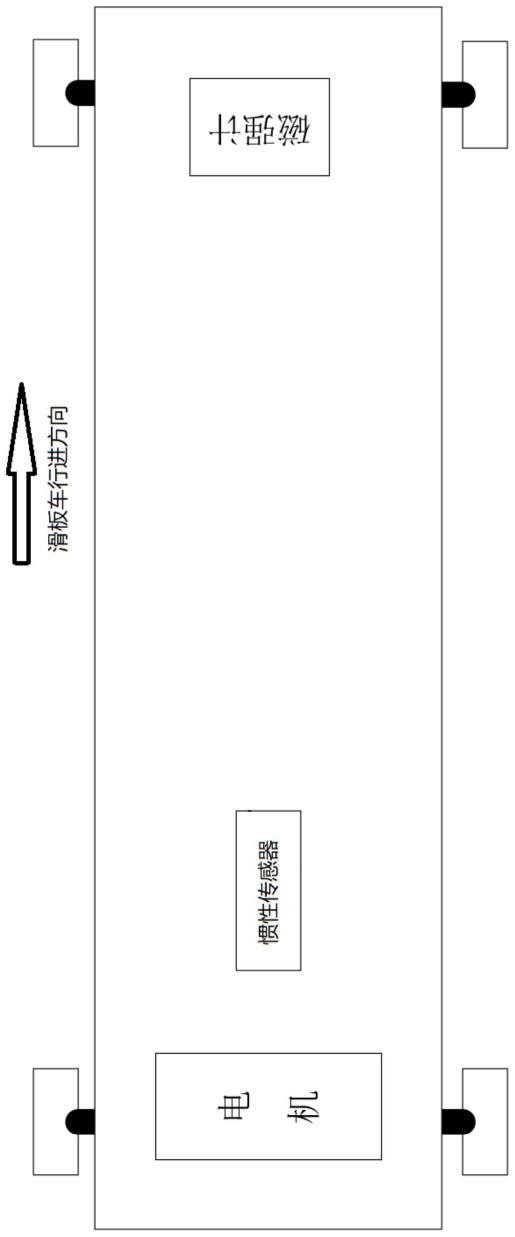
24.图1为实施方式八提供的精准位置监控电动滑板车的传感器安装示意图;
25.图2为实施方式八提到的检测软件的流程图。
具体实施方式
26.为使本实用新型提供的技术方案的优点和有益之处表述得更加清楚,现结合附图对本实用新型提供的技术方案进行进一步详细的解释,具体的:
27.实施方式一、本实施方式提供了姿态监测模块,用于电动滑板车,所述的模块包括:惯性传感器和主控单元,所述的主控单元电连接所述的惯性传感器,用于采集所述的惯
性传感器的实时数据,所述惯性传感器用于检测电动滑板车的姿态。
28.具体的,本实施方式提供的姿态检测模块应用于电动滑板车,所述的惯性传感器用于设置并固定在电动滑板车的重心位置、用于监测所述的电动滑板车的加速度和加速角度;所述主控单元用于采集所述的惯性传感器的实时数据。
29.本实施方式的有益之处在于:
30.提供基于惯性传感器的位姿监测模块,用于检测电动滑板车的实时加速度和加速角度,相比较采用摄像头的坡道监测装置,本实施方式提供的技术方案能够不受光线和振动的干扰,以更低的制造和维护成本的方式实现更稳定可靠的姿态监测功能,同时因为是内置模块,不需要考虑磕碰、雨淋等情况造成的失灵或损坏的问题。
31.实施方式二、本实施方式是对实施方式一提供的姿态检测模块的进一步限定,所述的惯性传感器为gy25系列传感器。
32.本实施方式的有益之处在于:
33.采用gy25系列传感器,由于其可以直接输出具体角度值,因此可以大幅度简化软件设计。
34.实施方式三、本实施方式是对实施方式一提供的姿态检测模块的进一步限定,所述的主控单元采用单片机控制电路实现。
35.实施方式四、本实施方式是对实施方式一至三任意一项提供的姿态检测模块的进一步限定,所述的模块还包括:磁强计,所述的主控单元电连接所述的磁强计,用于采集所述的磁强计的实时数据。
36.具体的,所述的磁强计用于设置在所述的电动滑板车远离电机的一端、用于监测所述的电动滑板车的航向角,所述的磁强计发送检测信号给所述的主控单元。
37.本实施方式的有益之处在于:
38.加入磁强计的设计,使电动滑板车的位置检测更加精准,通过强磁计和惯性传感器的配合:磁强计检测的磁场方向是否在惯性传感器检测到直线加速度时保持不变,或磁场方向的变化是否与持续改变的加速度相吻合,从而得到准确的电动滑板车的位姿监测功能,同时在磁强计和惯性传感器的数据不匹配时,则证明电动滑板车的位姿监测功能出现问题,便于在问题产生初期及时处理,保证滑板车的可靠性。
39.实施方式五、本实施方式提供了电动滑板车,包括滑板,其特征在于,所述的电动滑板车还包括实施方式一至三任意一项提供的姿态检测模块;所述的惯性传感器固定在所述的滑板的重心位置。
40.具体的,电动滑板车包括电机驱动模块和驱动轮,所述的电机驱动模块用于驱动电动滑板车的驱动轮旋转,所述电机驱动模块接收来自所述的主控单元的驱动信号,所述的主控单元监测到电动滑板车加速度方向沿竖直方向与水平面的夹角角度超出预设值时,向所述的电机驱动模块发送驱动信号,所述的电机驱动模块根据接收到的驱动信号控制驱动轮的转速。
41.当竖直方向的加速角度在所述的滑板车的上方方向超出预设值时,则证明此时电动滑板车处于下坡路段,主控盒驱动电机实现减速,当竖直方向的加速角度在所述的滑板车的下方方向超出预设值时则证明此时电动滑板车处于上坡路段,主控盒驱动电机实现加速。
42.本实施方式的有益之处在于:
43.电动滑板车上设置有基于惯性传感器的位姿监测模块,通过判断加速度方向与水平方向的数值夹角实现监测电动滑板车的上坡、下坡状态,实现了不受光线和振动的干扰,以更低的制造和维护成本,不怕碰撞或淋雨等情况的稳定的位姿监测功能,通过位姿监测功能实现了电动滑板车的上下坡辅助,填补了现有技术的空缺。
44.实施方式六、本实施方式是对实施方式五提供的电动滑板车的进一步限定,所述的电动滑板车还包括:指示灯,所述的指示灯的信号输入端连接所述的主控单元的信号输出端、固定在所述的电动滑板车的侧壁上。
45.本实施方式的有益之处在于:
46.通过惯性传感器的数据,当加速度数据突然在某一个方向上增大时,则证明电动滑板车处于“失控”状态,如突然向后的过大加速度,则证明电动滑板车撞到了障碍物,如突然向侧面的过大加速度,则证明电动滑板车发生侧翻,以上情况均被定义为危险情况,在发生危险情况发生时,指示灯亮起,提醒过往车辆和行人注意避让,保护使用者和周围行人的安全。
47.实施方式七、本实施方式是对实施方式五提供的电动滑板车的进一步限定,所述的电动滑板车还包括:蜂鸣器,所述的蜂鸣器的信号输入端连接所述的主控单元的信号输出端、固定在所述的电动滑板车的底面上。
48.本实施方式的有益之处在于:
49.由于电动滑板车速度快,动力强,且缺乏约束驾驶人员的设备,因此,更容易发生安全事故,本实用新型提供了通过惯性传感器的数据,当数据突然增加时,则证明电动滑板车发生碰撞或侧翻等危险情况,蜂鸣器在电动滑板车发生危险情况时响起,提醒过往车辆和行人注意避让,保护使用者和周围行人的安全。
50.实施方式八、结合图1说明本实施方式,本实施方式提供了电动滑板车,包括滑板、电机驱动系统、一组驱动轮和一组从动轮,所述电机驱动系统固定在所述滑板底部临近驱动轮附近,用于驱动所述驱动轮转动,其特征在于,所述的电动滑板车还包括实施方式四提供的姿态检测模块,所述的惯性传感器固定在所述的滑板的重心位置,所述的磁强计固定在所述的滑板底部距离电机驱动系统较远的一端。
51.具体的,电动滑板车包括电机驱动模块和驱动轮,所述的电机驱动模块用于驱动电动滑板车的驱动轮旋转,所述电机驱动模块接收来自所述的主控单元的驱动信号,所述的主控单元监测到电动滑板车加速度方向沿竖直方向与水平面的夹角角度超出预设值时,向所述的电机驱动模块发送驱动信号,所述的电机驱动模块根据接收到的驱动信号控制驱动轮的转速。
52.具体的,传感器的安装方式为铣槽和螺钉配合的固定方式,且需要与滑板本体连接牢靠;磁强计安装位置应尽量远离电机等磁场源,且尽可能避免使用铁磁性零件,如:钢制螺丝。
53.本实用新型提供的精准位姿监控电动滑板车,包括安装于电动滑板车重心处的惯性传感器,以及一个安装在远离电机处的磁强计。基于该电动滑板车的结构,本领域技术人员使用惯性传感器配合现有技术中的姿态解算算法得出滑板车的姿态以及加速度,与主控单元相配合,实现坡道辅助,碰撞报警等功能。具体的功能的实现方式本领域技术人员根据
其应当掌握的编程能力能够实现,例如图2所示的流程图,就是一种编程思路。
54.本实施方式的有有益之处在于:
55.设置在重心处的惯性传感器能够得到更准确的惯性数据,磁强计的位置距离电机较远,能够避免电机的干扰。
56.保留了不受光线和振动的干扰,以更低的制造和维护成本的方式实现更稳定可靠的姿态监测功能,且基于采集的位姿和惯性加速度的数据,更精准的检测电动滑板车的实时状态,实现更加灵敏的坡道辅助和碰撞报警、摔倒报警的功能。
57.实施方式九、本实施方式是对实施方式八提供的电动滑板车的进一步限定,所述的电动滑板车还包括:指示灯,所述的指示灯的信号输入端连接所述的主控单元的信号输出端、固定在所述的电动滑板车的侧壁上。
58.实施方式十、本实施方式是对实施方式八提供的电动滑板车的进一步限定,所述的电动滑板车还包括:蜂鸣器,所述的蜂鸣器的信号输入端连接所述的主控单元的信号输出端、固定在所述的电动滑板车的底面上。
59.以上所述的几个实施方式是为了使本实用新型提供的技术方案的优点和有益之处体现得更清楚,并不用于作为对本实用新型的限制,任何基于本实用新型的精神和原则范围内的,对本实用新型的修改、实施方式的组合、改进和等同替换等,均应当包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1