一种可自动产生多种电弧的故障电弧生成设备的制作方法
1.本实用新型涉及电弧产生装置,具体涉及一种可自动产生多种电弧的故障电弧生成设备。
背景技术:
2.近年来,民用建筑电气火灾形势严峻,电气火灾约占火灾总数的30%。而在电气火灾的发生原因中,故障电弧是主要的原因。研发针对故障电弧的探测与保护装置,已受到各个国家的重视。故障电弧产品试验项目繁多,故障电弧的种类也有很多种。故障电弧指因接触不良、线路老化、绝缘破损、导线损坏等引起的电弧。一般分为串联电弧、并联电弧等种类。
3.在现有技术中,为了对故障电弧进行试验、研究,进而对避免故障电弧的方案进行研究,需要在实验室对故障电弧的产生进行重现。在现有技术中,一般自动化程度不高,需要手工接线,手工测试,测试、试验效率低,人工劳动强度大,试验和研究条件的可重复性差,电弧的产生情况难以复现。而且如果需要同时产生几种电弧的话,靠人工控制,难以达到时间上的同步性,也不方便精确控制电弧的产生时间。
技术实现要素:
4.针对现有技术的不足,本实用新型公开了一种可自动产生多种电弧的故障电弧生成设备。
5.本实用新型所采用的技术方案如下:
6.一种可自动产生多种电弧的故障电弧生成设备,包括至少一种电弧产生装置和用于控制所述电弧产生装置的电弧控制装置;所述电弧产生装置包括底板、第一电弧产生结构和第二电弧产生结构;所述第一电弧产生结构通过固定结构固定于所述底板的第一端;在所述底板的第二端固定有电机支架;步进电机固定于所述电机支架;所述第二电弧产生结构通过导向结构固定于所述步进电机的轴;所述导向结构将所述步进电机的轴的转动转换为直线运动;当所述第一电弧产生结构和所述第二电弧产生结构接近或者接触时,所述第一电弧产生结构和所述第二电弧产生结构之间产生电弧;所述电弧控制装置的信号输出端控制所述步进电机。
7.其进一步的技术方案为,所述导向结构包括滚珠丝杆副;所述滚珠丝杠副包括螺母和螺杆;所述螺杆固定连接于所述步进电机的轴;所述第二电弧产生结构固定于所述螺母。
8.其进一步的技术方案为,所述电弧产生装置是并联电弧发生器、串联交流电弧发生器和/或串联直流电弧发生器。
9.其进一步的技术方案为,所述电弧产生装置是并联电弧发生器;所述第一电弧产生结构包括线夹;所述第二电弧产生结构包括刀架和固定于所述刀架的第一侧上的刀片;所述螺母固定于所述刀架的第二侧。
10.其进一步的技术方案为,所述导向结构包括导向杆支架和穿过所述导向杆支架的导向杆;所述导向杆的第一端固定于所述刀架的第二侧;所述导向杆的第二端穿过所述电机支架并支撑于所述电机支架。
11.其进一步的技术方案为,所述电弧产生装置是串联交流电弧发生器;所述第一电弧产生结构是碳棒;所述第二电弧产生结构为第一触针。
12.其进一步的技术方案为,所述电弧产生装置是串联直流电弧发生器;所述第一电弧产生结构为铜棒;所述第二电弧产生结构为第二触针;在所述铜棒和所述第二触针外套有套筒。
13.其进一步的技术方案为,所述导向结构包括导向杆支架;所述导向杆穿过所述导向杆支架并可相对于所述导向杆支架移动;所述螺母固定于所述导向杆的第一端;所述第二电弧产生结构固定于所述导向杆的第二端;在所述导向杆的侧壁设置有导向槽;所述导向杆相对于所述导向杆支架移动时,固定于所述导向杆支架的导向螺钉的端头在所述导向槽中移动。
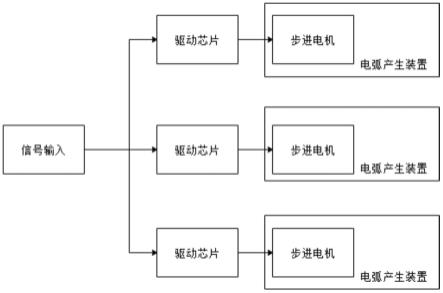
14.其进一步的技术方案为,每个所述电弧产生装置均设置有相对应的电弧控制装置;所述电弧控制装置包括信号输入装置和驱动芯片;所述信号输入装置的信号输出端连接所述驱动芯片的信号输入端;所述驱动芯片的信号输出端控制所述步进电机。
15.其进一步的技术方案为,所述驱动芯片的型号为tb6560;所述步进电机的型号为42hs3404a4。
16.本实用新型的有益效果如下:
17.1、本实用新型对不同的电弧产生装置进行统一的结构改变,使得第一电弧产生结构和第二电弧产生结构之间的距离可以通过步进电机统一控制,配合驱动芯片,就可以自动控制不同种类电弧的产生,进而方便记录不同电弧产生的数据和状况,便于对电弧故障产生进行试验和研究。
18.2、本实用新型通过导向结构将步进电机的旋转运动转换为直线运动,则步进电机可以控制第一电弧产生结构和第二电弧产生结构接近、接触或者远离,也可以控制第一电弧产生结构和第二电弧产生结构之间的距离。当第一电弧产生结构和第二电弧产生结构接近或者接触时,第一电弧产生结构和第二电弧产生结构之间产生电弧。本实用新型可以设置并联电弧发生器、串联电弧发生器、直流电弧发生器,通过驱动芯片进行统一控制,可以精确控制试验条件,也方便控制各个电弧的产生时间,同时,也方便复现故障电弧的产生条件。
19.3、本实用新型的第一电弧产生结构和第二电弧产生结构本身也方便安装、拆卸和更换,当第一电弧产生结构和第二电弧产生结构之间因为电弧的产生而造成损坏时,可以随时及时的更换,方便使用。
附图说明
20.图1为本实用新型的整体结构示意图。
21.图2为本实用新型的并联电弧发生器的结构示意图。
22.图3为本实用新型的串联交流电弧发生器的结构示意图。
23.图4为本实用新型的串联直流电弧发生器的结构示意图。
24.图5为本实用新型中驱动芯片和步进电机的示意图。
25.图中:1、底板;2、螺钉;3、固定结构;4、电机支架;5、步进电机;6、螺杆;7、螺母;8、导向杆支架;9、导向杆;101、线夹;102、刀架;103、刀片;104、紧固旋钮;105、夹板;106、旋转轴;201、碳棒;202、第一触针;203、第一导向螺钉;301、铜棒;302、第二触针;303、套筒;304、第二导向螺钉。
具体实施方式
26.下面结合附图,说明本实用新型的具体实施方式。
27.图1为本实用新型的整体结构示意图。如图1所示,可自动产生多种电弧的故障电弧生成设备包括至少一种电弧产生装置和用于控制电弧产生装置的电弧控制装置。不同的种类的电弧产生装置用于产生不同种类的电弧。以便于对电弧的产生的数据和产生环境状况予以检测、记录和试验。电弧产生装置是并联电弧发生器、串联交流电弧发生器、串联直流电弧发生器中的一种或者几种,用于适应不同的故障电弧的试验标准。图2为本实用新型的并联电弧发生器的结构示意图。参考图2,本实用新型的电弧产生装置包括底板1、第一电弧产生结构和第二电弧产生结构。第一电弧产生结构通过固定结构3固定于底板1的第一端。在底板1的第二端固定有电机支架4。步进电机5固定于电机支架4。第二电弧产生结构通过导向结构固定于步进电机5的轴。导向结构将步进电机5的轴的转动转换为直线运动。
28.信号输入装置可以给驱动芯片发出控制信号,驱动芯片则控制步进电机5的工作状态和工作参数,步进电机5工作时,步进电机5的轴旋转,导向结构将旋转运动转换为直线运动,则步进电机5可以控制第一电弧产生结构和第二电弧产生结构接近、接触或者远离,也可以控制第一电弧产生结构和第二电弧产生结构之间的距离。当第一电弧产生结构和第二电弧产生结构接近或者接触时,第一电弧产生结构和第二电弧产生结构之间产生电弧。
29.则通过分别控制电弧产生装置的工作状态,以及具体控制第一电弧产生结构和第二电弧产生结构之间的距离,就可以自动控制不同种类电弧的产生,进而方便记录不同电弧产生的数据和状况,便于对电弧故障产生进行试验和研究。
30.图2所示的是电弧产生装置的一种实施例。如图2所示,电弧产生装置是并联电弧发生器。第一电弧产生结构是线夹101。固定结构3通过螺钉2固定于底板1的第一端。线夹101固定于固定结构3之上。第二电弧产生结构包括刀架102,在刀架102上设置有夹板105,夹板105将刀片103夹在中间。刀片103可绕旋转轴106旋转以调整刀片103的角度,最后通过紧固旋钮104将刀片103固定。螺母7固定于刀架102的第二侧。
31.导向结构包括滚珠丝杆副。滚珠丝杠副包括螺母7和螺杆6。螺杆6固定连接于步进电机5的轴。第二电弧产生结构固定于螺母7。导向结构还包括导向杆支架8和穿过导向杆支架8的导向杆9。导向杆9的第一端固定于刀架102的第二侧。导向杆9的第二端穿过电机支架4并支撑于电机支架4。
32.当步进电机5开启运转时,步进电机5的轴旋转,固定于步进电机5的轴的螺杆6跟随轴旋转,与螺杆6配套的螺母7直线位移,与螺母7固定在一起的刀架102直线位移,固定于刀架102上的刀片103直线位移。电线固定于线夹101,当刀片103被带动以至于砍在固定于线夹101上的电线上,在刀片103和电线之间会短路以产生并联电弧。如果不需要电弧,则可控制步进电机5反向旋转即可,且可以根据需要快速更换刀片103和电线。
33.在刀架102直线位移的时候,导向杆支架8和电机支架4是固定于底板1上的,导向杆9则是相对于导向杆支架8和电机支架4可移动的。导向杆9的第一端和刀架102之间是固定的。由于导向杆支架8和电机支架4的限制,导向杆9在移动时不会随意变动方向,保证了刀片103和电线的接触位置的准确。
34.图3为本实用新型的串联交流电弧发生器的结构示意图。如图3所示,电弧产生装置是串联交流电弧发生器。第一电弧产生结构是碳棒201。固定结构3通过螺钉2固定于底板1的第一端。碳棒201穿过固定结构3,并通过紧固螺钉固定。第二电弧产生结构为第一触针202。导向结构包括滚珠丝杆副。滚珠丝杠副包括螺母7和螺杆6。螺杆6固定连接于步进电机5的轴。导向结构还包括导向杆支架8。导向杆9穿过导向杆支架8并可相对于导向杆支架8移动。螺母7固定于导向杆9的第一端。第二电弧产生结构固定于导向杆9的第二端,并通过导向杆9固定于螺母7。在导向杆9的侧壁设置有导向槽。导向杆9相对于导向杆支架8移动时,固定于导向杆支架8的第一导向螺钉203的端头在导向槽中移动。
35.当步进电机5开启运转时,步进电机5的轴旋转,固定于步进电机5的轴的螺杆6跟随轴旋转,与螺杆6配套的螺母7直线位移,与螺母7固定在一起的导向杆9直线位移,固定于导向杆9的的第一触针202直线位移。当第一触针202被带动以至于和碳棒201接触时,在第一触针202和碳棒201之间会产生串联电弧。如果不需要电弧产生,则可控制步进电机5反向旋转即可,且可以根据需要快速更换碳棒201和第一触针202。
36.在导向杆9直线位移的时候,导向杆支架8是固定于底板1上的,固定于导向杆支架8的第一导向螺钉203也是相对固定的,导向杆9是相对于导向杆支架8可以移动,在导向杆9移动的过程中,第一导向螺钉203的端头在导向杆9的侧壁设置的导向槽移动,则限制了导向杆9的移动范围,使之保持直线移动且不会随意转动,保证了第一触针202和碳棒201之间准确接触。
37.图4为本实用新型的串联直流电弧发生器的结构示意图。如图4所示,串联直流电弧发生器。如图4所示,第一电弧产生结构是铜棒301。固定结构3通过螺钉2固定于底板1的第一端。铜棒301穿过固定结构3,并通过紧固螺钉固定。第二电弧产生结构为第二触针302。在铜棒301和第二触针302外套有套筒303。第二触针302在移动过程中,不会脱离套筒303的范围。第二触针302的移动方法与图3所示的实施例相同。导向杆9相对于导向杆支架8移动时,固定于导向杆支架8的第二导向螺钉304的端头在导向槽中移动。
38.参考图1~图4,实施例可以同时包括三种电弧产生装置,每个电弧产生装置均设置有相对应的电弧控制装置。电弧控制装置包括信号输入装置和驱动芯片。信号输入装置的信号输出端连接驱动芯片的信号输入端。信号输入装置可以是按钮或者其他输入信号。三种电弧产生装置本身的额电路连接结构是较为常见的现有技术,不再赘述。驱动芯片的信号输出端控制步进电机5。图5为本实用新型中驱动芯片和步进电机的示意图。如图5所示,具体的,驱动芯片的型号可以选用tb6560。步进电机5的型号可以选用42hs3404a4。型号为tb6560的驱动芯片本身是用于控制步进电机5的,其包括励磁参数设置端口m1,m2、衰减模式设置端口dcy1,dcy2,以及半电流转矩设置端口tq1,tq2。驱动芯片的差分输出信号端口oa1,oa2,ob1,ob2连接至步进电机5。驱动芯片本身控制步进电机的程序为驱动芯片自带,不是本实用新型的保护范围。
39.则通过控制信号输入装置,就可以控制电弧产生装置根据需要在特定时间产生特
定种类的故障电弧,以便于对电弧的产生数据以及产生状态进行记录和研究。
40.以上描述是对本实用新型的解释,不是对实用新型的限定,本实用新型所限定的范围参见权利要求,在不违背本实用新型的基本结构的情况下,本实用新型可以作任何形式的修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1