高频冲击试验辅助装置的制作方法
1.本实用新型属于跌落式冲击台技术领域,具体涉及一种高频冲击试验辅助装置。
背景技术:
2.随着科技的发展,所衍生的高科技产品越来越多,能更好地应用于国防领域及民生活动中,高科技产品应用领域越广泛,对环境适应性要求也就会越高,仅对于冲击环境而言,试验量级、冲击次数、冲击频次以及冲击的重复性要求等等,较三四年前都有了很大的变化。
3.近期,我实验室经常遇到高频次较大量级的冲击试验,如半正弦波冲击(230g,2ms)、(100g,6ms)、(50g,11ms)、(25g,20ms)等试验量级,要求冲击频次在(25~80)次/min,这样的冲击量级,在一般以电机拖动凸轮作为核心驱动的碰撞台上是无法完成的,由于冲击能量较低;若使用跌落式冲击台,试验量级可以满足,但冲击频次却太低,市场上现有的跌落式冲击台都具备自动冲击功能,通常采用升降机或液压缸作为升降机构,其冲击频次约(10~12) 次/min。
技术实现要素:
4.有鉴于此,本实用新型的主要目的在于提供一种高频冲击试验辅助装置。
5.为达到上述目的,本实用新型的技术方案是这样实现的:
6.本实用新型实施例提供一种高频冲击试验辅助装置,该装置设置在冲击试验台上,并且包括空压机、电气控制柜、上升气缸、激光位移传感器、复位气缸、上滑轮组件、上托组件、接近传感器、下滑轮组件,所述空压机与电气控制柜连接,所述电气控制柜分别与上升气缸、复位气缸连接,所述上升气缸、复位气缸分别设置在冲击试验台的左右两侧,所述激光位移传感器设置在上升气缸的输出端,所述上滑轮组件设置两个,其中一个上滑轮组件设置在冲击试验台的光轴的顶部并且贯穿上托组件后与下滑轮组件的一侧连接,另一个上滑轮组件设置在冲击试验台的升降机构上并且贯穿上托组件后与下滑轮组件的另一侧连接,所述下滑轮组件的一侧还通过绳索与上升气缸的输出端连接,所述下滑轮组件的另一侧还通过绳索与复位气缸的输出端连接;所述上托组件设置两个在冲击试验台的冲击座两侧,所述接近传感器设置在冲击试验台的光轴的下侧。
7.上述方案中,所述上滑轮组件包括固定支架、第一滑轮、第一绳索,所述固定支架固定在冲击试验台的光轴的顶部或者冲击试验台的升降机构上,所述第一滑轮设置在固定支架上,所述第一绳索绕设在第一滑轮上并且贯穿贯穿上托组件后与下滑轮组件连接。
8.上述方案中,所述上托组件包括上托支架、托锥,所述上托支架固定在冲击试验台的冲击座侧面,所述托锥设置在上托支架下侧,所述第一绳索贯穿上托支架和托锥。
9.上述方案中,所述下滑轮组件包括滑轮组、长轴、带轴承支架,所述长轴水平向设置在冲击试验台的冲击平台上,所述长轴上间隔设置若干个带轴承支架,所述长轴的两侧分别设置滑轮组,所述滑轮组用于与第一绳索连接,还用于通过绳索与上升气缸、复位气缸
的输出端连接。
10.上述方案中,所述电气控制柜包括计时控制器js、位移控制器wy、频次控制器pc、接近位移传感器jj、流量控制阀llkzf、进/排气电磁控制阀dchxf、计数控制器jss、24v电源、流量指示器llzs、流量调节电位器tj,所述空压机分别接在火线进线l1、火线控制线l2、火线出线l3上,所述火线出线l3 和零线n上依次并联计时控制器js、接近位移传感器jj、位移控制器wy、计时控制器js、计数控制器jss、流量控制阀llkzf,所述火线出线l3和零线n 上还连接24v电源,所述24v电源上并联有流量指示器llzs,所述流量指示器 llzs上并联有依次连接的计时控制器js、启动按钮qd、停止按钮tz、进/排气电磁控制阀dchxf,所述计时控制器js上并联计数控制器jss,所述24v电源上还并联有依次连接的jw、进/排气电磁控制阀dchxf,所述24v电源上还并联有依次连接的流量调节电位器tj、流量控制阀llkzf,所述24v电源上还并联有依次连接的频次控制器pc、进/排气电磁控制阀dchxf。
11.与现有技术相比,本实用新型有效扩展了实验室冲击试验的能力范围,主要用于高频次较大量级的冲击试验项目,此项目中冲击峰值大于100g的试验量级在西北地区尚无设备可以完成,本实用新型在现有冲击试验台上完成改造后,所试产品尺寸和重量依循原冲击试验台要求,分别为≤700mm
×
700mm和≤ 200kg。
附图说明
12.此处所说明的附图用来公开对本实用新型的进一步理解,构成本实用新型的一部分,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
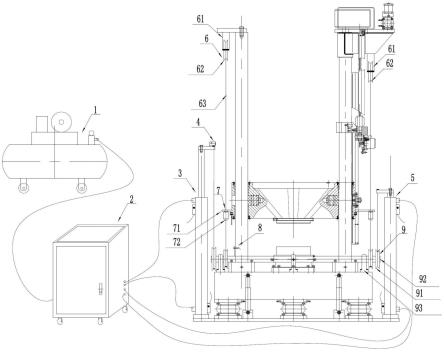
13.图1为本实用新型实施例提供一种高频冲击试验辅助装置的结构示意图;
14.图2为本实用新型实施例提供一种高频冲击试验辅助装置中控制电路的电路图。
具体实施方式
15.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
16.本实施例的附图中相同或相似的标号对应相同或相似的部件;在本实用新型的描述中,需要理解的是,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
17.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、物品或者装置中还存在另外的相同要素。
18.本实用新型实施例提供一种高频冲击试验辅助装置,如图1所示,该装置设置在冲
击试验台上,并且包括空压机1、电气控制柜2、上升气缸3、激光位移传感器4、复位气缸5、上滑轮组件6、上托组件7、接近传感器8、下滑轮组件9,所述空压机1与电气控制柜2连接,所述电气控制柜2分别与上升气缸3、复位气缸5连接,所述上升气缸3、复位气缸5分别设置在冲击试验台的左右两侧,所述激光位移传感器4设置在上升气缸3的输出端,所述上滑轮组件6设置两个,其中一个上滑轮组件6设置在冲击试验台的光轴的顶部并且贯穿上托组件7后与下滑轮组件9的一侧连接,另一个上滑轮组件6设置在冲击试验台的升降机构上并且贯穿上托组件7后与下滑轮组件9的另一侧连接,所述下滑轮组件9的一侧还通过绳索与上升气缸3的输出端连接,所述下滑轮组件 9的另一侧还通过绳索与复位气缸5的输出端连接;所述上托组件7设置两个在冲击试验台的冲击座两侧,所述接近传感器8设置在冲击试验台的光轴的下侧。
19.所述上滑轮组件6包括固定支架61、第一滑轮62、第一绳索63,所述固定支架61固定在冲击试验台的光轴的顶部或者冲击试验台的升降机构上,所述第一滑轮62设置在固定支架61上,所述第一绳索63绕设在第一滑轮62上并且贯穿贯穿上托组件7后与下滑轮组件9连接。
20.所述上托组件7包括上托支架71、托锥72,所述上托支架71固定在冲击试验台的冲击座侧面,所述托锥72设置在上托支架71下侧,所述第一绳索63 贯穿上托支架71和托锥72。
21.所述下滑轮组件9包括滑轮组91、长轴92、带轴承支架93,所述长轴92 水平向设置在冲击试验台的冲击平台上,所述长轴92上间隔设置若干个带轴承支架93,所述长轴92的两侧分别设置滑轮组91,所述滑轮组91用于与第一绳索63连接,还用于通过绳索与上升气缸3、复位气缸5的输出端连接。
22.如图2所示,所述电气控制柜2包括计时控制器js、位移控制器wy、频次控制器pc、接近位移传感器jj、流量控制阀llkzf、进/排气电磁控制阀dchxf、计数控制器jss、24v电源、流量指示器llzs、流量调节电位器tj,所述空压机1分别接在火线进线l1、火线控制线l2、火线出线l3上,所述火线出线l3 和零线n上依次并联计时控制器js、接近位移传感器jj、位移控制器wy、计时控制器js、计数控制器jss、流量控制阀llkzf,所述火线出线l3和零线n 上还连接24v电源,所述24v电源上并联有流量指示器llzs,所述流量指示器 llzs上并联有依次连接的计时控制器js、启动按钮qd、停止按钮tz、进/排气电磁控制阀dchxf,所述计时控制器js上并联计数控制器jss,所述24v电源上还并联有依次连接的jw、进/排气电磁控制阀dchxf,所述24v电源上还并联有依次连接的流量调节电位器tj、流量控制阀llkzf,所述24v电源上还并联有依次连接的频次控制器pc、进/排气电磁控制阀dchxf。
23.所述空压机1为本实用新型提供动力,最大蓄压压力1.2mpa,所用输出气管直径为ф12,要求压力在0.8mpa时,容积流量0.9m3/min。
24.所述的电气控制柜2主要用于控制上升气缸3和复位气缸5的动作,通过计时器、计数控制器、位移控制器、频次控制器、流量控制器、流量控制阀、进/排气电磁控制阀、激光位移传感器4、接近传感器8、固态继电器等部件互相动作,完成对上升气缸3和复位气缸5上升、下降动作的控制。
25.所述上升气缸3用于快速顶起冲击台面使其进行往复自由跌落式冲击动作,气缸内径80mm,最大行程1300mm,要求购置参数在气压0.8mpa时出力约500kg,50ms可动作一次。
26.根据圆柱体积公式:
27.v=πr2 h=3.14
×
0.082
×
1.3=0.0261248m3
28.当空压机1容积流量0.9m3/min时,向上升气缸3内充满气体只需 1.7416533s。
29.冲击台面上升最高处1300mm时,理想状态下无阻尼自由跌落所需下降时间,根据公式h=1/2gt2可得出t=(2h/g)1/2=0.5099s。
30.根据现有冲击台结构与所选用气缸的最大行程,冲击台面在辅助冲击装置的拖动下,上升最大高度1300mm时,即可实现:
31.冲击台面升至1300mm时,上升和下降时间合计约2.2515s,每分钟最多可冲击26.6次;
32.冲击台面升至1300m时,更换不同的波形发生器,可完成最大的冲击量级为(500g,1ms)与(300g,2ms)。
33.同理,对于高频次冲击小量级(25g,20ms),冲击台面上升高度约300mm 时,上升与下降时间合计约0.64686s,每分钟冲击可达92.7次。
34.对于常见的较大量级(230g,2ms),要求频次为35次/min的试验项目,经过计算,当冲击台面上升至800mm时,上升与下降时间合计约1.47s,每分钟最多可冲击40.8次;再经过反复调试,通过频次控制器控制流量控制阀的流量输出,即可精确满足35次/min的要求。
35.所述的激光位移传感器4用于指示上升气缸3与冲击台面上升的高度,进而控制进/排气电磁控制阀的通断,实现冲击台面反复多次上升高度的一致性,激光位置传感器4的光标落点为冲击试验台左侧光轴。
36.所述复位气缸5的尺寸和技术参数同上升气缸3,上升时协助上升气缸3 拖动冲击台面上升,只是在冲击台面到达指定高度后,复位气缸5的活塞会快速下降,通过钢索拖动所带托锥迅速复位,保证系统所用钢索保持紧绷状态。
37.所述上滑轮组件6由两套固定支架与两个滑轮组成,固定在冲击试验台顶端两侧,用于上升气缸3顶起台面时钢索的滑动。
38.所述上托组件7为两套,均由一个上托支架和一个托锥组成,托锥有钢索牵引,钢索穿过上托支架中孔通过上滑轮固定在下滑轮上,由上升气缸3和复位气缸5拖动上下往复运动。
39.所述的接近传感器8安装于冲击试验台配重底座上,由冲击台面左下方固定的钢片给予信号,用于计数器计数,位移清零信号。
40.所述下滑轮组件9安装于冲击试验台配重底座上,由一根长轴,四个滑轮以及三个带轴承的长轴支架组成,左侧两个滑轮与上升气缸通过钢索连接,负责冲击台面托起时,钢索在其上无阻尼快速滑动;右侧两个滑轮与复位气缸通过钢索连接,负责冲击台面到达指定位置后,使托锥快速复位,以避免冲击台面在下落时撞上托锥。
41.本实用新型在现有冲击试验台底板两侧附加延长板上加装两根内径为 80mm的气缸,左侧上升气缸3活塞顶杆上顶板上安装有激光位移传感器与上升拖动用钢索,主要用于冲击台面托起,位移控制等。右侧复位气缸5顶部顶板安装有复位用钢索,与上升气缸3动作同步但作用不一,主要用于托锥复位,并保持系统中钢索一直处于紧绷状态,若只依靠托锥重量拖动钢索下落,其速度太慢,会导致系统所用钢索松垮,再次上升时由于动作太快,可能会导致钢索脱离滑轮,造成卡滞,损坏系统。上滑轮6一共两套分别安装于冲击试验顶部,
一套安装于左侧光轴顶部,另一台安装于升降机底座下端。这样会造成两侧所使用的钢索长度不一致,调整时以冲击台面在最低处为零位进行钢索剪裁,保证其动作的一致性。
42.上托组件7通过螺钉固定于台面两个下侧位置,两侧固定高度要保持一致,钢索连接着托锥通过上托板中孔穿过,托锥为上圆柱下倒圆柱体,上圆柱直径比上托板中孔大6~10mm均可。随着上升气缸3托起冲击台面到达指定高度,复位气缸5会反向运动快速拖动钢索使托锥快速下降,这时冲击台面也自由落体向下撞击波形发生器。接近传感器8与下滑轮组件9同样安装于冲击试验台配重底座上,接近传感器8通过冲击台面下方安装的感应板遮挡接近传感器前端,给予计数器信号,记录冲击次数,到数停止系统。其次可用于气缸复位,位移清零的辅助作用。下滑轮组件9,长轴两侧和中部安装有固定用滚针轴承,通过圆弧底座和上圆弧压盖箍紧轴承,固定在冲击试验台配重底座上。长轴两侧各装有两个滑轮,内侧两个滑轮用于冲击台面的上升拖动,左侧滑轮用于上升气缸3上升拖动长轴及其上其他三个滑轮正转,使台面快速上升。右侧滑轮在复位气缸5下降时,拖动长轴及其他三个轮滑反转,使托锥快速下降复位。避免冲击台面下落时的撞击。
43.如图1、2所示,该装置在精确“冲击台面上升高度”和“冲击次数”时有较完善的算法与控制。激光位移传感器4在调试时以冲击台面在最低处时为校准零位,同样冲击试验台上所示标尺也以冲击台面在最低处时台面上平面为起始点。那么冲击台面所上升的高度可以直接输入位移控制器中,当上升气缸3 与复位气缸5上升到达指定位置后,激光位移传感器会反馈给位移控制器信号,位移控制器通过触点控制进/排气电磁控制阀的通断及换向,位移控制器所显示的位移只是激光位移传感器4向上的位移,到达所设置的位移后自动清零,清零信号触点上分接有接近传感器8的信号线,用于其给予计时控制器t2记录冲击台面下落至零位的计时停止信号。上升气缸3与复位气缸5通过进/排气电磁控制阀换向,从上进气孔反向充气,同时下进气孔通过进/排气电磁控制阀排气,使气缸活塞迅速复位。复位气缸5在复位时会拖动下滑轮组件9反转,从而拖动冲击台面两侧托锥快速下降,避免冲击台面下落时的撞击。冲击台面下落后左下角的感应片给予接近传感器8信号,接近传感器8给予计数控制器信号用于计数,冲击次数够数后,断开进/排气电磁控制阀电源,系统停止动作。
44.以冲击峰值a为230g,脉冲宽度d为2ms,要求频次为35次/min的试验条件为例。为控制每分钟满足35次的冲击频次要求,首先根据时间控制器t1 记录的冲击台面到达指定位置的时间,t2记录冲击台面自由跌落的时间,t1、 t2均由位移控制器给予其计时开启与停止信号,计时控制设置一般只记录冲击一次的时间。通过计算知,完成(230g,2ms)的冲击,单次时间合计为1.47s,与计时控制器所记录的时间t1+t2之和相差0.03s。这个0.03s的差值就是实际与理论的体现,理论计算是在无阻尼的状态下,实际冲击则是台面沿两根立柱光轴运动,所以在下落时会受到光轴与冲击台面轴套间摩擦阻力的影响。按照计时控制器所记录的时间计算每分钟最多可冲击40次,而试验条件要求的每分钟35次的冲击次数如何实现呢?采用延长上升气缸3的上升时间来最终满足,具体有两个途径,一是将所需的上升时间(人工计算)输入频次控制器的 sk栏中,二是将要求的频次值输入pc栏中。当使用频次值控制次数时,sk栏中还需要输入台面下落的用时,这样频次控制器就可以通过控制流量器输出的大小,来控制上升气缸到达指定高度的时间,满足试验所要求的冲击频次。尽管这样使用多个组件相结合的控制相对于触摸屏+plc控制线路及控制方式较为繁琐,有些数
据还需要人工计算,但成本远远低于触摸屏+plc控制。
45.本实用新型工作原理:
46.如图1所示:本实用新型主要采用压缩空气为动力,气缸为实施主体,通过电气控制气缸的上升高度、上升时间、往复频次等,来满足较大量级高频次冲击试验的要求。整个系统使用两个同样的气缸,一个负责拖动冲击台面上升,一个辅助上升并负责托锥快速复位。此装置安装于现有冲击试验台两侧,不改变原冲击试验台的技术参数,在原有的技术参数上进行扩展,能够满足常见试验条件:半正弦波(500g,1ms)、(300g,2ms)、(230g,2ms)、(100g,6ms); (50g,11ms);(25g,20ms),冲击频次在(25~80)次/min等的试验要求。
47.经大量实操调试积累后,对于上述常见的试验条件,可将其频次、高度h、上升时间t1、下落时间t2等不同组合建表,方便查阅调用,提高操作效率,更好更快地确保试验结果一致性。
48.以上所述,仅为本实用新型的较佳实施例而已,并非用于限定本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1