一种新型样品瓶自动抓手装置的制作方法
1.本实用新型涉及样品检测领域,特别涉及一种新型样品瓶自动抓手装置。
背景技术:
2.实验室或检测部门在对样品检测的一个完整的样品分析过程中,大致可以分为四个步骤:样品采集、样品前处理、分析测定、数据处理与报告结果。其中样品前处理所需要的时间最长;通常分析一个样品只需要几分钟至几十分钟,而样品前处理所需要的时间却是分析过程的几倍或几十倍。特别是一些样品的检测需要采用吹扫捕集法,需要将水样或固形物等样品,在一定时间内连续通入惰性气体的方式将待检成分析出,耗时较长;另外现在实验室样品检测量也很大,为提高工作效率,操作者对检测设备的自动化需求越来越迫切。
3.为实现自动化检测,需要将样品装入样品瓶内,通过自动化结构实现样品的自动更换工作,样品瓶自动抓手的工作可靠性是实现样品检测自动化的前提条件。故需要一种方便好用的新型样品瓶自动抓手装置。
技术实现要素:
4.为了解决上述问题,本实用新型提供一种方便好用的新型样品瓶自动抓手装置。
5.本实用新型中的一种新型样品瓶自动抓手装置,包括手指气缸、夹具和缓冲条,所述手指气缸与夹具连接,所述夹具内侧设有缓冲条,所述手指气缸上设有第一端口和第二端口,所述第一端口和第二端口通过输入气压使手指气缸运作。
6.上述方案中,所述夹具为l型夹具,所述夹具包括两个l型夹具。
7.上述方案中,所述l型夹具上设有数个凸起,所述缓冲条通过凸起固定在夹具的内侧。
8.上述方案中,所述夹具上共设有四个缓冲条。
9.上述方案中,所述手指气缸采用高压空气作为动力,所述高压空气为0.3~0.7mpa。
10.本实用新型的优点和有益效果在于:本实用新型提供一种方便好用的新型样品瓶自动抓手装置。l型夹具可以牢牢抓住样品瓶,方便后续的操作,方便实用,稳定可靠,提高效率。
附图说明
11.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
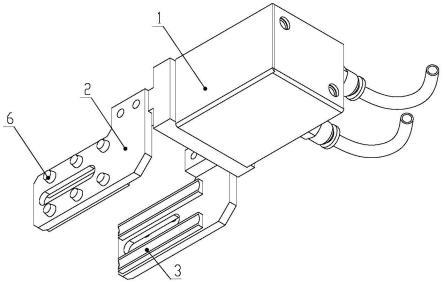
12.图1为本实用新型的结构示意图;
13.图2为夹取样品瓶的示意图;
14.图3为释放样品瓶的示意图。
15.图中:1、手指气缸 2、夹具 3、缓冲条 4、第一端口
16.5、第二端口 6、凸起 7、样品瓶
具体实施方式
17.下面结合附图和实施例,对本实用新型的具体实施方式作进一步描述。以下实施例仅用于更加清楚地说明本实用新型的技术方案,而不能以此来限制本实用新型的保护范围。
18.如图1所示,本实用新型是一种新型样品瓶自动抓手装置,包括手指气缸1、夹具2和缓冲条3,手指气缸1与夹具2连接,夹具2内侧设有缓冲条3,手指气缸1上设有第一端口4和第二端口5,第一端口4和第二端口5通过输入气压使手指气缸1运作。
19.夹具2包括两个l型夹具。l型夹具上设有数个凸起6,缓冲条3通过凸起6固定在夹具2的内侧。夹具2上共设有四个缓冲条3。
20.手指气缸1采用高压空气作为动力,高压空气输入压力为0.3~0.7mpa。
21.将缓冲条3通过凸头6固定在l型夹具的安装孔内,缓冲条3在样品瓶7夹取的过程中起到增加摩擦力和防止撞击的作用,在夹紧样品瓶7的过程中,4个缓冲条3可以将样品瓶7牢固地固定住。然后将两个l型夹具固定在手指气缸1的手指上,朝向一致,l型夹具随着手指气缸1的手指闭合和开启实现对样品瓶7的夹取和释放功能。本自动抓手装置需要牢固地安装在三维机器人上使用,安装时缓冲条3的方向垂直于样品瓶7瓶口面。
22.如图2所示,夹取样品瓶7时,通过手指气缸1的第二端口5输入空气,第一端口4排出空气,l型夹具处于张开状态,工作时先通过三维机器人将l型夹具定位到样品瓶7的正上方,然后将抓手结构向下移动,使夹具位于样品瓶体的上部约1/3处。
23.如图3所示,释放样品瓶7时,通过手指气缸1的第一端口4输入空气,第二端口5排出空气,l型夹具处于闭合状态,通过缓冲条3将样品瓶7紧紧夹住。再通过三维机器人将样品瓶7运输到所需要的位置,通过程序设置可以根据需求开启或闭合抓手结构从而实现样品前处理的自动化。本实用新型结构可以根据样品瓶的规格更换l型夹具。
24.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种新型样品瓶自动抓手装置,其特征在于,包括手指气缸、夹具和缓冲条,所述手指气缸与夹具连接,所述夹具内侧设有缓冲条,所述手指气缸上设有第一端口和第二端口,所述第一端口和第二端口通过输入气压使手指气缸运作。2.根据权利要求1所述的一种新型样品瓶自动抓手装置,其特征在于,所述夹具为l型夹具,所述夹具包括两个l型夹具。3.根据权利要求2所述的一种新型样品瓶自动抓手装置,其特征在于,所述l型夹具上设有数个凸起,所述缓冲条通过凸起固定在夹具的内侧。4.根据权利要求3所述的一种新型样品瓶自动抓手装置,其特征在于,所述夹具上共设有四个缓冲条。5.根据权利要求1所述的一种新型样品瓶自动抓手装置,其特征在于,所述手指气缸采用高压空气作为动力,所述高压空气为0.3~0.7mpa。
技术总结
本实用新型公开了一种新型样品瓶自动抓手装置,包括手指气缸、夹具和缓冲条,手指气缸与夹具连接,夹具内侧设有缓冲条,手指气缸上设有第一端口和第二端口,第一端口和第二端口通过输入气压使手指气缸运作。采用上述技术方案制成了一种方便好用的新型样品瓶自动抓手装置。L型夹具可以牢牢抓住样品瓶,方便后续的操作,方便实用,稳定可靠,提高效率。提高效率。提高效率。
技术研发人员:黄河 吕士文 苏超
受保护的技术使用者:上海思达分析仪器股份有限公司
技术研发日:2022.06.29
技术公布日:2022/12/27
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1